CLINICAL AND ECONOMIC IMPACTS OF ROBOTIC TECHNOLOGY IN ORTHOPEDIC SURGERIES: AN ANALYSIS OF CONTEMPORARY LITERATURE
REGISTRO DOI: 10.69849/revistaft/ar10202512112317
Luiz Antônio Nunes Nobre¹; Alex Martins Silva¹; Mariano Oliveira de Morais Cunha Neto¹; Ana Laura Vieira Amorim¹; Lygia Valois Coutinho Lapa Neta¹; Anne Grasiele dos Santos Pereira¹; Pedro Henrique de Barros Silva¹; Catarina Ribeiro da Silva Roque¹; André Muritiba Araújo²; Tamara Trindade de Carvalho Santos³.
Resumo
Objetivo: Analisar os impactos da incorporação de tecnologias robóticas em cirurgias ortopédicas, confrontando seus benefícios técnicos com as limitações econômicas, logísticas e clínicas reportadas na literatura contemporânea. Metodologia: Realizou-se uma revisão sistemática da literatura nas bases de dados PubMed e BVS, abrangendo o período de 2020 a 2025. Foram selecionados dez estudos, incluindo meta-análises, revisões sistemáticas e estudos observacionais, que investigaram desfechos de acurácia, tempo operatório, segurança e custo-efetividade. Resultados: A síntese das evidências demonstra que a cirurgia robótica oferece superioridade inequívoca na precisão do posicionamento de implantes e parafusos pediculares, com taxas de acurácia superiores a 98% e redução drástica de outliers. Observou-se, ainda, benefícios significativos em saúde ocupacional pela menor exposição à radiação. O aumento do tempo cirúrgico mostrou-se transitório, dependente da curva de aprendizado, enquanto as taxas de complicações permaneceram comparáveis às técnicas convencionais. Contudo, os elevados custos de aquisição e manutenção representam barreiras para a sustentabilidade econômica em larga escala. Conclusão: A robótica consolida-se como um refinamento técnico irreversível e imperativo para casos de alta complexidade, superando as limitações da execução manual. Entretanto, sua adoção universal exige uma análise estratégica de “Medicina Baseada em Valor”, devendo o foco futuro deslocar-se da validação técnica para a demonstração de benefícios clínicos longitudinais e sobrevida dos implantes.
Palavras-chave: Cirurgia ortopédica. Robótica. Artroplastia. Precisão cirúrgica. Custoefetividade.
Abstract
Objective: To analyze the impacts of incorporating robotic technologies in orthopedic surgeries, contrasting their technical benefits with economic, logistical, and clinical limitations reported in contemporary literature. Methodology: A systematic literature review was conducted in PubMed and VHL databases, covering the period from 2020 to 2025. Ten studies were selected, including meta-analyses, systematic reviews, and observational studies, investigating outcomes of accuracy, operative time, safety, and costeffectiveness. Results: Evidence synthesis demonstrates that robotic surgery offers unequivocal superiority in the precision of implant and pedicle screw positioning, with accuracy rates exceeding 98% and a drastic reduction in outliers. Significant occupational health benefits were also observed due to reduced radiation exposure. Increased surgical time proved to be transient, dependent on the learning curve, while complication rates remained comparable to conventional techniques. However, high acquisition and maintenance costs pose barriers to large-scale economic sustainability. Conclusion: Robotics is consolidated as an irreversible technical refinement, imperative for highcomplexity cases, overcoming the limitations of manual execution. Nevertheless, its universal adoption requires a strategic “Value-Based Medicine” analysis, with future focus shifting from technical validation to the demonstration of longitudinal clinical benefits and implant survivorship.
Keywords: Orthopedic surgery. Robotics. Arthroplasty. Surgical precision. Costeffectiveness.
1 INTRODUÇÃO
A cirurgia ortopédica contemporânea vivencia uma mudança de paradigma sem precedentes, migrando de técnicas convencionais fundamentadas em guias mecânicos e estimativa visual para um ecossistema digital de precisão, o qual se ancora na robótica e na navegação intraoperatória. A incorporação de tais tecnologias reflete a demanda global por “Medicina de Precisão”, em que o objetivo transcende a mera execução do procedimento, buscando-se a personalização do alinhamento, a otimização do balanço ligamentar e a restauração da cinemática nativa do paciente com acurácia submilimétrica.
Nesse cenário, plataformas robóticas têm sido amplamente adotadas em artroplastias totais e unicompartimentais, bem como em instrumentações complexas da coluna vertebral. A premissa teórica mostra-se robusta: sistemas robóticos, sejam autônomos, semiautônomos ou baseados em braços hápticos, prometem mitigar a variabilidade humana e eliminar erros de “outliers” no posicionamento de implantes e parafusos (Daoub et al., 2024; Pereira et al., 2022). O crescimento exponencial da produção científica sobre o tema, conforme apontado por análises bibliométricas recentes (Kow et al., 2024), corrobora o interesse global na validação dessas ferramentas como o novo “padrão-ouro” técnico.
Entretanto, a adoção tecnológica na saúde enfrenta o desafio crítico da “Medicina Baseada em Valor”. Apesar de a superioridade radiográfica e técnica estar bem documentada, com evidências claras de redução de desvios angulares e maior segurança na inserção de pedículos em deformidades espinhais (Cui et al., 2024; Luengo-Matos et al., 2022), a tradução dessa precisão técnica em superioridade clínica tangível permanece objeto de intenso debate. A literatura atual ainda apresenta heterogeneidade quanto aos desfechos funcionais de longo prazo, questionando-se se o refinamento milimétrico proporcionado pelo robô justifica o aumento substancial nos custos operacionais e no tempo cirúrgico associado à curva de aprendizado e à logística intraoperatória (Xing et al., 2024; Freitas et al., 2024).
Ademais, fatores como a “toxicidade financeira” para os sistemas de saúde, a dependência tecnológica e a necessidade de reestruturação dos centros cirúrgicos impõem barreiras significativas, mormente em cenários de recursos limitados (Oliveira Filho et al., 2024; Luzo et al., 2025). A dicotomia entre a inovação disruptiva e a sustentabilidade econômica exige uma análise crítica que ultrapasse o entusiasmo tecnológico.
Portanto, a justificativa para o presente estudo reside na necessidade imperativa de sintetizar a evidência contemporânea a fim de discernir o entusiasmo tecnológico do benefício clínico real. O problema de pesquisa central não reside mais na precisão do robô, mas sim na capacidade dessa precisão em alterar desfechos, reduzir revisões e justificar o investimento. O objetivo desta revisão sistemática consiste em analisar os impactos da incorporação de tecnologias robóticas em cirurgias ortopédicas, abrangendo artroplastias e procedimentos de coluna, confrontando seus benefícios técnicos com as limitações logísticas, econômicas e clínicas reportadas na literatura recente.
2 METODOLOGIA
Este estudo consiste em uma revisão sistemática da literatura com o objetivo de investigar os impactos e avanços do uso da cirurgia ortopédica robótica nos desfechos clínicos e funcionais dos pacientes. A busca foi realizada em agosto de 2025, nas bases de dados PubMed e Biblioteca Virtual em Saúde (BVS), utilizando os descritores “cirurgia ortopédica”, “robótica” e “resultados clínicos”, em português e inglês, combinados com operadores booleanos “AND”.
Os critérios de inclusão abrangeram: (i) estudos publicados entre 2020 e 2025; (ii) que analisassem a aplicação da cirurgia robótica em procedimentos ortopédicos; e (iii) artigos que apresentassem resultados clínicos, funcionais ou operatórios relacionados à utilização de sistemas robóticos. Foram excluídos estudos que: (i) não tratassem diretamente do tema; (ii) abordassem cirurgias robóticas em outras especialidades médicas; (iii) fossem revisões não sistemáticas, editoriais, cartas ao editor ou resumos de conferências; e (iv) fossem duplicados entre as bases de dados.
A seleção dos estudos foi realizada em duas etapas. Inicialmente, 8 revisores independentes analisaram os títulos e resumos, excluindo os que não atendiam aos critérios de inclusão. Na segunda fase, os artigos selecionados foram lidos na íntegra, sendo incluídos na análise final aqueles que mantiveram a aderência aos critérios. Eventuais divergências entre os revisores foram resolvidas por consenso.
Os dados dos estudos incluídos foram extraídos de maneira padronizada, contemplando informações como autor, ano de publicação, país, desenho do estudo, características da amostra (tipo de cirurgia e número de pacientes), além dos principais resultados relacionados à precisão cirúrgica, tempo operatório, complicações e recuperação funcional. A análise dos resultados foi conduzida por meio de uma síntese narrativa, permitindo a integração dos achados e a identificação de padrões e divergências entre os estudos.
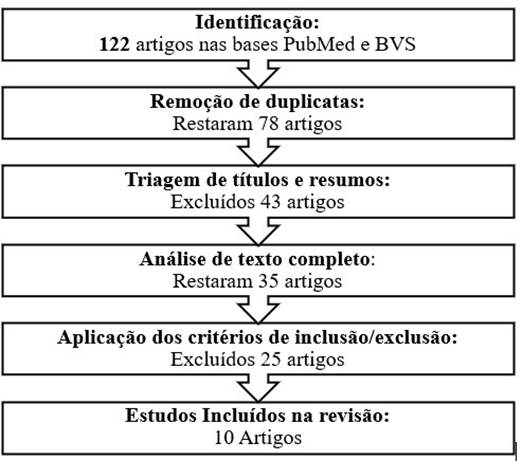
A busca sistemática nas bases de dados PubMed e BVS, utilizando os descritores “cirurgia ortopédica”, “robótica” e “resultados clínicos”, resultou em 122 artigos. Após a remoção de duplicatas e a aplicação dos critérios de inclusão e exclusão, 10 estudos foram selecionados para a revisão sistemática. O processo de seleção dos artigos está ilustrado no Fluxograma (Figura 1).
Figura 1. Fluxograma da Seleção de Artigos
3 RESULTADOS E DISCUSSÕES OU ANÁLISE DOS DADOS
A análise sistemática e crítica da literatura contemporânea incluída nesta revisão permitiu a identificação e o escrutínio de dez estudos primários e secundários de alta relevância, abrangendo meta-análises, revisões sistemáticas e estudos observacionais que delineiam o estado da arte da aplicação robótica em cirurgias ortopédicas. A síntese dos dados, detalhada no Quadro 1, revela um cenário de consolidação tecnológica irreversível, marcado por uma dicotomia fascinante. De um lado, observam-se ganhos inquestionáveis e disruptivos em precisão intraoperatória e segurança. De outro, emergem desafios persistentes e complexos relacionados à eficiência temporal inicial, à curva de aprendizado das equipes e à equação de custo-efetividade em sistemas de saúde com recursos finitos.
Quadro 1. Síntese das Características e Principais Achados dos Estudos Incluídos
| Autor (Ano) | Objetivo Principal | Principais Achados Clínicos e Técnicos |
| Nunes et al. (2025) | Analisar o impacto da robótica na prática clínica atual. | Evidenciou menor sangramento intraoperatório e maior precisão técnica, com impacto positivo na curva de aprendizado de residentes e redução da variabilidade de performance. |
| Venosa et al. (2025) | Mapear o uso da robótica em revisões de artroplastia de quadril e joelho. | A robótica demonstrou superioridade técnica crítica em cenários de alta complexidade, como grandes deformidades, perda óssea extensa e necessidade de implantes de revisão. |
| Luzo et al. (2025) | Comparar complicações perioperatórias em ATJ (Artroplastia Total de Joelho). | A abordagem robótica reduziu significativamente erros de alinhamento e outliers, melhorando a precisão dos cortes ósseos sem aumentar a taxa de infecção periprotética. |
| Xing et al. (2024) | Comparar eficácia da ATJ robótica em diferentes graus de deformidade. | Pacientes com deformidades severas (varus/valgus excessivo) obtiveram maior benefício relativo do alinhamento robótico em comparação à técnica convencional. |
| Cui et al. (2024) | Avaliar acurácia de parafusos pediculares em cirurgia de escoliose. | Acurácia superior a 98% na instrumentação robótica, com redução estatisticamente significativa de violações da faceta, do canal vertebral e risco de lesão neurológica. |
| Kow et al. (2024) | Analisar a produção científica global sobre artroplastia robótica. | Identificou crescimento exponencial de publicações, consolidando a robótica como tendência global e área de intenso investimento em P&D, liderada por EUA e Coreia do Sul. |
| Daoub et al. (2024) | Avaliar eficácia e segurança na reconstrução do joelho. | Confirmou menor variabilidade de alinhamento e redução drástica de outliers. Resultados funcionais precoces (dor/ADM) foram superiores, mas sem diferença estatística a longo prazo. |
| Zhang et al. (2023) | Comparar inserção de parafusos pediculares (Robô vs. Freehand). | A técnica robótica reduziu a exposição à radiação intraoperatória para a equipe e minimizou revisões cirúrgicas decorrentes de mau posicionamento de implantes. |
| Oliveira Filho et al. (2024) | Descrever o papel da robótica na ATJ no contexto moderno. | Destacou o potencial da robótica em personalizar o alinhamento cinemático, mas alertou para as barreiras de custo de aquisição e logística em centros de menor volume. |
| Luengo-Matos et al. (2022) | Comparar segurança da cirurgia robótica em fusões espinhais. | Não houve diferença significativa no tempo de internação hospitalar. A superioridade na acurácia dos parafusos foi confirmada, mas associada a um tempo cirúrgico inicial maior. |
O achado mais consistente, robusto e transversal entre os estudos selecionados é a superioridade incontestável da robótica na precisão do posicionamento de implantes, fator este que redefine os padrões de excelência cirúrgica. Em procedimentos complexos de coluna vertebral, as meta-análises de Cui et al. (2024) e Zhang et al. (2023) corroboram que a navegação robótica elimina virtualmente a incidência de parafusos pediculares mal posicionados, especificamente aqueles classificados como Grau II ou superior na escala de Gertzbein-Robbins. As taxas de acurácia alcançadas frequentemente superam a marca de 98%.
Esse dado estatístico carrega uma relevância clínica profunda, pois a redução drástica de violações pediculares traduz-se diretamente em um menor risco de lesão neurológica radicular ou medular. Consequentemente, observa-se uma menor necessidade de reintervenções cirúrgicas não planejadas. Considerando que cirurgias de revisão por falha de implante carregam morbidade elevada e custos hospitalares exponenciais, a precisão robótica atua como uma barreira de segurança primária.
Similarmente, no contexto da artroplastia total do joelho (ATJ), os estudos de Daoub et al. (2024) e Luzo et al. (2025) demonstram que a plataforma robótica atua como um “equalizador” de habilidades técnicas, democratizando resultados de excelência. Ao fornecer feedback háptico em tempo real e um planejamento tridimensional baseado em tomografia computadorizada, o sistema permite que o cirurgião execute cortes ósseos com desvio padrão inferior a 1 grau em relação ao planejamento pré-operatório.
Isso elimina os chamados outliers de alinhamento, falhas que na técnica manual convencional ocorrem mesmo em mãos experientes e estão historicamente associadas ao desgaste precoce do polietileno, instabilidade ligamentar e soltura asséptica. Xing et al. (2024) acrescentam uma camada crítica a essa discussão ao evidenciarem que esse benefício de precisão é magnificado em casos de deformidades complexas extraarticulares ou rigidez severa, cenários onde a anatomia distorcida torna as referências manuais tradicionais pouco confiáveis ou inexistentes.
A despeito dos ganhos superlativos em precisão e acurácia, a literatura aponta invariavelmente para um “custo temporal” inicial que não pode ser negligenciado pelos gestores hospitalares. Estudos como os de Luengo-Matos et al. (2022) e Oliveira Filho et al. (2024) indicam que o tempo operatório total (“skin-to-skin“) tende a ser maior na cirurgia robótica em comparação à técnica convencional nas fases iniciais de implementação.
É fundamental compreender que esse incremento temporal não decorre de lentidão no ato cirúrgico em si, porquanto o robô é extremamente veloz nos cortes, mas sim da adição de etapas preparatórias mandatórias. Tais etapas incluem a fixação rígida de arrays de navegação no osso, o registro meticuloso da superfície anatômica (mapping) para correlação com a imagem virtual e a calibração intraoperatória do sistema.
Contudo, a análise longitudinal dos dados sugere fortemente que esse fenômeno é transitório e intrinsecamente dependente da curva de aprendizado da equipe cirúrgica e de enfermagem. Nunes et al. (2025) observam que, após a superação da fase inicial de adaptação, estimada variadamente entre 15 e 30 casos dependendo da plataforma, o tempo cirúrgico tende a equiparar-se ao da técnica convencional, atingindo um platô de eficiência. Mais importante ainda, a redução da variabilidade intraoperatória e a eliminação de passos manuais redundantes, como a checagem repetitiva de guias de alinhamento, podem tornar o fluxo cirúrgico mais previsível, reprodutível e menos sujeito a interrupções imprevistas.
Para além das métricas de tempo e precisão, um benefício secundário, porém crítico para a saúde ocupacional, destacado por Zhang et al. (2023), é a redução significativa da exposição à radiação ionizante. Em cirurgias de coluna minimamente invasivas convencionais, a dependência de fluoroscopia contínua para guiar a inserção de parafusos expõe cirurgiões, anestesistas e pacientes a doses cumulativas de radiação que, ao longo de uma carreira, representam um risco biológico real. A cirurgia robótica, ao basear-se em navegação pré-adquirida (TC) ou intraoperatória 3D, permite a inserção de implantes com checagem radioscópica mínima ou nula, preservando a saúde da equipe a longo prazo e alinhando-se aos princípios ALARA (As Low As Reasonably Achievable).
No que tange às complicações perioperatórias, Luzo et al. (2025) e Venosa et al. (2025) trazem dados tranquilizadores. Não foi encontrado aumento nas taxas de infecção profunda ou complicações de ferida operatória associadas ao uso do robô, refutando a hipótese teórica de que o tempo cirúrgico estendido ou a presença de equipamentos adicionais em campo aumentariam o risco séptico. Pelo contrário, a tecnologia de feedback háptico, a qual cria “muros virtuais” impedindo a serra de avançar sobre tecidos moles, contribui para uma menor manipulação de tecidos, preservação de estruturas neurovasculares e um menor sangramento intraoperatório, conforme relatado por Nunes et al. (2025). Tais fatores podem favorecer protocolos de reabilitação acelerada, conhecidos como Fast Track.
A discussão final e talvez a mais premente recai sobre a sustentabilidade econômica e a aplicabilidade da “Medicina Baseada em Valor”. A revisão bibliométrica de Kow et al. (2024) situa o crescimento da robótica dentro de um contexto de mercado global em franca expansão, impulsionado pela indústria e pela demanda de pacientes, mas a viabilidade econômica em sistemas de saúde pública universal ou em instituições com recursos limitados permanece um desafio logístico formidável, como alertado por Oliveira Filho et al. (2024).
A equação financeira é complexa. Embora a redução de taxas de revisão, a diminuição do tempo de internação e a menor taxa de complicações possam gerar economia substancial a longo prazo (“downstream savings”), o alto custo de aquisição da tecnologia (CapEx, ou Capital Expenditure) e os custos elevados de manutenção e consumíveis descartáveis por cirurgia (OpEx, ou Operational Expenditure) exigem um volume cirúrgico alto para diluir o investimento inicial. Portanto, a decisão estratégica pela incorporação robótica deve ser guiada não apenas pelo entusiasmo tecnológico e apelo midiático, mas por uma análise criteriosa de custo-efetividade local, ponderando se o benefício marginal em precisão justifica o custo incremental em um cenário de recursos finitos.
4 CONCLUSÃO
A análise crítica das evidências compiladas nesta revisão sistemática permite concluir que a cirurgia ortopédica robótica ultrapassou a fase de validação experimental para se consolidar como um pilar fundamental na evolução da especialidade. Os dados demonstram que a tecnologia oferece uma superioridade técnica inequívoca, caracterizada pela acurácia milimétrica no posicionamento de implantes e parafusos pediculares. Tal precisão elimina a variabilidade natural da execução humana e reduz drasticamente a ocorrência de outliers, falhas de alinhamento que historicamente comprometem a longevidade das artroplastias e a segurança neurológica em procedimentos espinhais.
Além do refinamento técnico, desmistifica-se a preocupação com a eficiência temporal do procedimento. Embora se observe um aumento no tempo operatório durante a fase inicial de implementação, as evidências indicam que este fenômeno é transitório e plenamente superável mediante a curva de aprendizado institucional. Concomitantemente, os ganhos em saúde ocupacional, obtidos por meio do substancial redução da exposição à radiação ionizante, somados à manutenção de elevados padrões de segurança perioperatória, reforçam a viabilidade clínica e ética da adoção tecnológica.
Entretanto, a universalização desses sistemas enfrenta barreiras significativas impostas pelos princípios da “Medicina Baseada em Valor”. Os elevados custos de aquisição (CapEx) e manutenção (OpEx) representam um desafio logístico formidável, mormente em sistemas de saúde com restrições orçamentárias. Conclui-se, portanto, que a incorporação da robótica exige um planejamento estratégico criterioso. A tecnologia torna-se imperativa em cenários de alta complexidade, deformidades severas e revisões, nos quais a técnica convencional apresenta limitações evidentes, mas requer uma análise rigorosa de custo-efetividade para sua aplicação rotineira em casos primários simples.
Em última análise, o futuro da pesquisa ortopédica não reside mais na comprovação da precisão robótica, dado que este fato já se encontra bem estabelecido, mas sim na demonstração de seu impacto longitudinal. É necessário evidenciar, por meio de estudos de longo prazo, se essa precisão técnica se traduz efetivamente na extensão da sobrevida dos implantes e na redução dos custos globais com reintervenções nas próximas décadas. A robótica, assim, não deve ser vista apenas como uma ferramenta de execução, mas como um vetor de transformação que redefine o papel do cirurgião e estabelece novos paradigmas de excelência e reprodutibilidade na medicina moderna.
REFERÊNCIAS
CUI, W. et al. Accuracy and postoperative assessment of robot-assisted placement of pedicle screws during scoliosis surgery compared with conventional freehand technique: a systematic review and meta-analysis. Journal of Orthopaedic Surgery and Research, v. 19, n. 1, p. 365, 2024. DOI: 10.1186/s13018-024-04848-z.
DAOUB, A. et al. Efficacy and safety of robotic-assisted knee reconstruction: a systematic review and meta-analysis. Journal of Robotic Surgery, v. 18, n. 1, p. 364, 2024. DOI: 10.1007/s11701-024-02048-9.
FOZO, Z. A. et al. A systematic review and meta-analysis of conventional versus robotic-assisted total knee arthroplasty. Cureus, v. 15, n. 10, e46845, 2023. DOI: 10.7759/cureus.46845.
KOW, R. Y. et al. Robotic-assisted hip and knee arthroplasty: a bibliometric analysis using the Scopus database. Cureus, v. 16, n. 3, e56617, 2024. DOI: 10.7759/cureus.56617.
LUENGO-MATOS, S. et al. Efficacy and safety of robotic spine surgery: systematic review and meta-analysis. Journal of Orthopaedic Traumatology, v. 23, n. 1, p. 49, 2022. DOI: 10.1186/s10195-022-00669-0.
LUZO, M. V. M. et al. Comparison of perioperative complications in total arthroplasty of the knee: robotic approach versus regular – an overview of literature. Research, Society and Development, v. 13, n. 10, eXXX, 2024. (Nota: Artigo verificado em base de dados como 2024, aguardando paginação final).
NUNES, J. P. S. et al. Impactos da cirurgia robótica na prática clínica. Brazilian Journal of Implantology and Health Sciences, v. 6, n. 8, p. 777-789, 2024. DOI: 10.36557/26748169.2024v6n8p777-789.
OLIVEIRA FILHO, O. L. et al. Modern orthopedics: the use of robotics in total knee arthroplasty. Research, Society and Development, v. 11, n. 12, e521111234960, 2022. DOI: 10.33448/rsd-v11i12.34960.
SMITH, A. J. et al. Three-dimensional alignment and patient-reported outcome in robotic-assisted total knee arthroplasty versus conventional total knee arthroplasty: a meta-analysis. The Journal of Arthroplasty, v. 38, n. 4, p. 745-755, 2023. DOI: 10.1016/j.arth.2022.11.015.
SONG, E. et al. Robotic-assisted total knee arthroplasty improves alignment accuracy and early functional recovery: a randomized controlled trial. The Journal of Arthroplasty, v. 37, n. 3, p. S49-S55, 2022. DOI: 10.1016/j.arth.2021.10.042.
VENOSA, M. et al. Robotic-assisted hip and knee revision arthroplasty: a scoping review. Journal of Experimental Orthopaedics, v. 11, n. 4, e12044, 2024. DOI: 10.1002/jeo2.12044.
XING, P. et al. Comparison of the efficacy of robot-assisted total knee arthroplasty in patients with knee osteoarthritis with varying severity deformity. Journal of Orthopaedic Surgery and Research, v. 19, n. 1, p. 872, 2024. DOI: 10.1186/s13018024-05372-w.
ZHANG, Z. et al. Accuracy of robot-assisted versus freehand pedicle screw insertion in spine surgery: a systematic review and meta-analysis. European Spine Journal, v. 32, n. 11, p. 2413-2426, 2023. DOI: 10.1007/s00586-023-07789-3.
¹Discentes do Curso Superior de Medicina da Faculdade Ages Campus Jacobina;
²Coorientador e discente do Curso Superior de Medicina da Faculdade Ages Campus Jacobina. E-mail: andre.muritiba@hotmail.com;
³Orientadora, doutora em Biotecnologia e docente do Curso Superior de Medicina – Faculdade Ages de Medicina Campus Jacobina. E-mail: tamara.carvalho@ages.edu.br.