REGISTRO DOI:10.5281/zenodo.10220226
¹PIGNATARI, R. F.
¹NASCIMENTO, L. L
¹MALOYAMA, A. S
¹DIAS, L. S
1,2NORIEGA, C. L.
Resumo
No Brasil, diversas pessoas com deficiência auditiva relatam dificuldades para realizar atividades do cotidiano, impactando principalmente nas oportunidades educacionais e profissionais. Além disso, decorrente aos obstáculos de comunicação, este mesmo grupo de pessoas encontra desafios para acessar serviços de saúde, como o SUS (Sistema Único de Saúde). Diante desse problema, o presente artigo tem como objetivo desenvolver um protótipo de uma luva equipada com sensores de flexão, acelerômetros e giroscópio ligados a um microcontrolador. Esta luva será capaz de transformar gestos realizados pelo usuário em dados e classificar qual gesto foi realizado utilizando-se de um algoritmo de inteligência artificial.
Palavras-chave: Inteligência artificial. Reconhecimento de sinais. Microcontrolador. Libras.
Abstract
In Brazil, several people with hearing impairment reported difficulties in carrying out daily activities, mainly impacting educational and professional opportunities. Furthermore, due to communication obstacles, this same group of people encounters challenges in accessing health services, such as the SUS ( Sistema Único de Saúde). Faced with this problem, this article aims to develop a prototype of a glove equipped with flexion sensors, accelerometers and a gyroscope connected to a microcontroller. This glove will be able to transform gestures performed by the user into data and classify which gesture was performed using an artificial intelligence algorithm.
Keywords: Artificial Intelligence. Gesture recognition. Microcontroller. Libras.
1 Introdução
A deficiência auditiva impõe uma barreira na forma como as pessoas podem se engajar com o mundo ao seu redor. No Brasil, por exemplo, dois em cada três brasileiros com deficiência auditiva relataram dificuldades para realizar atividades do cotidiano, impactando principalmente nas oportunidades educacionais e profissionais e no ano de 2019, apenas 7% dos portadores de deficiência auditiva possuíam formação superior concluída, e 37% estavam inseridos no mercado de trabalho. (INSTITUTO LOCOMOTIVA, 2019). Além das barreiras linguísticas, pessoas com deficiência auditiva frequentemente encontram problemas em relação à acessibilidade, informação e serviços, no SUS (Sistema Único de Saúde), por exemplo, essas pessoas enfrentam obstáculos para acessar este serviço, em decorrência da dificuldade de comunicação nestes locais (Souza et al, 2017, p. 396).
Segundo dados do Instituto Brasileiro de Geografia e Estatística (IBGE) (2019), durante Pesquisa Nacional de Saúde (PNS) constatou-se que 1,1% da população brasileira apresentava algum nível de deficiência auditiva. A fim de incentivar a inclusão, em 2002 sancionou-se a lei nº 10.436 reconhecendo a Língua Brasileira de Sinais (Libras) como meio legal de comunicação e expressão, somando-se a isso conforme Art. 2° “Deve ser garantido, por parte do poder público em geral e empresas concessionárias de serviços públicos, formas institucionalizadas de apoiar o uso e difusão da Língua Brasileira de Sinais – Libras como meio de comunicação objetiva e de utilização corrente das comunidades surdas do Brasil.” (BRASIL, 2002, p.1).
Diante desse cenário, o presente projeto tem como objetivo conceber uma iniciativa que viabilize e aprimore a comunicação entre pessoas com deficiência auditiva e pessoas sem deficiência auditiva. Para enfrentar essas barreiras comunicativas, propõe-se a criação de uma luva equipada com sensores capazes de identificar e reconhecer gestos, que futuramente poderá ser utilizada tanto para facilitar a comunicação de uma pessoa surda como para o aprendizado de Libras para não-surdos.
Para este fim, foi adotada a abordagem ágil do Kanban e o apoio de um professor orientador para o desenvolvimento. Também foram utilizados um sensor de movimento (giroscópio e acelerômetro) e um sensor de flexão ligados a um microcontrolador, responsável por capturar e exibir os dados. Estes dados, por sua vez, foram utilizados para treinar e testar algoritmos de inteligência artificial.
2 Referencial teórico
Com o objetivo de entender o assunto e a problemática do trabalho em questão, o referencial teórico contextualiza as linguagens de sinais e as abordagens, visão computacional e luva sensorizada, consideradas para sua tradução.
2.1 Linguagens de sinais
As linguagens de sinais são as principais maneiras de comunicação das pessoas surdas. Diferente do uso de gestos, a linguagem de sinais leva em conta o movimento corporal e as expressões faciais (Li et al., 2021).
Além da importância que essas linguagens têm para pessoas surdas, elas também podem ser utilizadas por mergulhadores para se comunicarem embaixo da água e pelas forças armadas para a comunicação de maneira criptografada (Jani et al., 2018).
Existem diversos diversos tipos de linguagens de sinais, como a ASL (American Sign Language), a ISL (Indian Sign Language) e Libras (Linguagem Brasileira de Sinais).
2.2 Visão Computacional
A abordagem da visão computacional na tradução de linguagens de sinais é feita com a implementação da captura de vídeos ou imagens (Simoes Dias et al., 2022). No entanto, ainda segundo Simoes Dias et al. (2022), a variação de iluminação, a dependência de cores e problemas no fundo da imagem podem trazer desvantagens.
Do ponto de vista da visão computacional, de acordo com Lima et al. (2012), a maior ocorrência de ruídos no reconhecimento de sinais em imagens está relacionada à variação de intensidade de luz no ambiente. Além disso, sistemas baseados em visão computacional podem ser de difícil desenvolvimento por necessitar de cálculos extensos e complexos para o reconhecimento de movimentos (Ambar et al., 2018).
2.3 Luva Sensorizada
A utilização de uma luva para traduzir sinais é uma abordagem bem popular entre pesquisadores (Ambar et al., 2018). Jani et al. (2018) utilizou uma luva para reconhecer as 26 letras da ASL utilizando um acelerômetro e giroscópio (MPU-6050) e cinco sensores de flexão da Spectra Symbol posicionados nos dedos da mão, todos ligados a um Raspberry Pi Zero W em uma luva de algodão.
Enquanto que Simoes Dias et al. (2022) utilizou cinco sensores de flexão da Spectra Symbol também posicionados um em cada dedo, um sensor MPU-6050 posicionado na região dorsal da mão e um sensor de contato posicionado entre os dedos indicador e médio conectados a um Arduino Mega para fazer o reconhecimento das 26 letras do alfabeto de Libras. Diferente da abordagem de Jani et al. (2018), o uso do sensor de contato foi necessário por conta da grande semelhança entre os sinais obtidos entre as letras “U”, “V” e “R” no alfabeto de Libras. Para fazer a classificação dos dados obtidos, o algoritmo Random Forest foi utilizado, obtendo 96,15% de precisão.
Ambar et al. (2018) utilizou cinco sensores de flexão da Spectra Symbol costurados em uma luva de algodão branca, um acelerômetro GY-61 colocado na região do dorso da luva, um leitor de Micro SD e um speaker, todos ligados a um Arduino Mega 2560 para reconhecer sinais e emitir um som armazenado no Micro SD no speaker. Ainda segundo Ambar et al. (2018), a costura foi feita porque dessa maneira os sensores deixaram de ser afetados pelo movimento da luva. A precisão obtida nessa abordagem foi de 74%.
2.3.1 Sensores de flexão
De acordo com a Spectra Symbol, um sensor de flexão é um resistor variável que funciona aumentando a resistência no circuito quanto mais o componente se dobra. Na luva, a flexão dos dedos equipados com os sensores em configuração com o divisor de tensão (Figura 1), irão gerar variações nas resistências, e essas variações serão transformadas em níveis de tensão conforme a equação exibida na Figura 2. (SHAHEEN, 2018).
Figura 1 – Sensor de Flexão em Configuração de Razão do Divisor de Voltagem
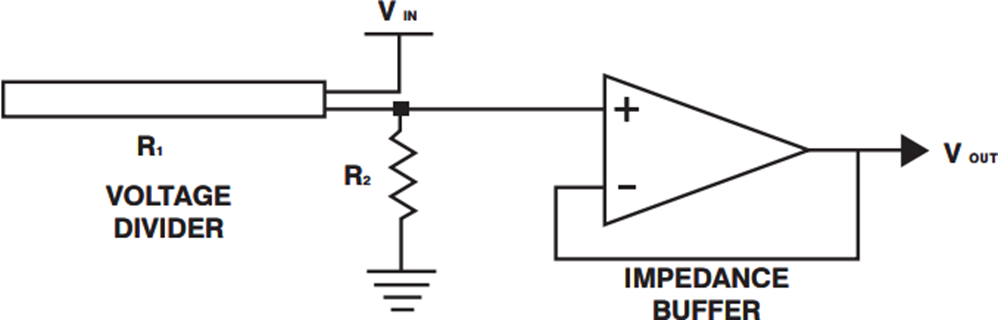
Fonte: Adaptado de Spectra Symbol(2014)
Figura 2 – Equação de Divisores de tensão
Fonte: Adaptado de Spectra Symbol(2014)
2.3.2 Sensor inercial
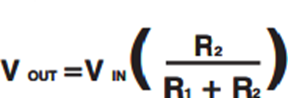
O sensor inercial MPU-6050 é um sensor que contém um acelerômetro e um giroscópio de 3 eixos integrados em um único sensor. A rotação da mão é lida pelos dados do acelerômetro, enquanto o movimento angular é rastreado pelo giroscópio, como demonstrado na Figura 3. (SHAHEEN, 2018).
Figura 3 – Orientação dos eixos e polaridade de rotação
Fonte: InvenSense (2013)
2.4 Inteligência Artificial
A Inteligência Artificial (IA) foi definida por J. McCarthy em 1956 como a ciência e engenharia de construir e tornar máquinas inteligentes (GURKAYNAK, YILMAZ e HAKSEVER, 2016). Nos últimos anos foram desenvolvidos uma grande quantidade de softwares que utilizam elementos de IA e seus subcampos (VALDATI, 2020).
Dentre os subcampos citados anteriormente, existe o machine learning, que é um campo baseado em tentar identificar padrões e prever resultados futuros com base em grandes quantidades de dados inseridos em um algoritmo de aprendizagem de máquina. (VALDATI, 2020).
Os subcapítulos a seguir descreverão alguns desses algoritmos de aprendizagem de máquina.
2.4.1 Decision Tree e Random Forest
Segundo BREIMAN et al. (2017), em uma decision tree particionamos as entradas com múltiplas partições binárias utilizando diferentes preditores, os subconjuntos criados são chamados de nodos e subconjuntos que não se dividem são chamados de nodos terminais. Decision trees podem ser usadas para classificação e regressão.
Ainda de acordo com BREIMAN et al. (2017), uma Random Forest é uma abordagem onde várias Decision Trees são criadas usando uma abordagem probabilística, por fim, a Random Forest seleciona a classificação escolhida pelo maior número de Decision Trees.
2.4.2 Support Vector Machine
A Support Vector Machines (SVM) é embasada pela teoria de aprendizado estático desenvolvida por CHERKASSKY et al. (1997) e estabelece uma série de princípios a serem seguidos na obtenção de classificadores com boa generalização. (LORENA et al., 2007).
Segundo AWAD et al. (2015), a SVM é um dos modelos mais populares no aprendizado de máquina supervisionado. Desde sua introdução em 1992, esse modelo passou a ser utilizado em várias aplicações, como na previsão do tempo, reconhecimento de voz, processamento de áudio e imagens, análise de vídeos e entre outros. (AWAD et al., 2015).
2.4.3 Regressão Logística
A regressão logística é um algoritmo para classificação binária baseado na teoria de aprendizado de máquina supervisionado. Ela é amplamente utilizada em tarefas como a estimativa da taxa de cliques e sistemas de recomendação devido à sua facilidade de implementação, boa interpretabilidade e facilidade de expansão. O funcionamento do algoritmo de regressão logística consiste na utilização da função logística para tornar linear a função de regressão linear múltipla e alcançar o efeito de classificação de dados e generalização do modelo (SUN et al, 2019).
2.5 Metodologias Ágeis
As metodologias ágeis representam uma forma de gerenciar e modelar um projeto de desenvolvimento de software, utilizando o desenvolvimento iterativo e incremental de software (GRANULO et al, 2019). No cenário de tecnologia, as metodologias ágeis tem se apresentado como um instrumento impactante no desenvolvimento de software, pois possibilita a entrega de um produto em um tempo hábil (FERRAO et al, 2015).
2.5.1 Kanban
Kanban é uma metodologia ágil que evoca uma imagem do trabalho e seu fluxo, dividindo-o em subtarefas ao mesmo tempo em que as coloca no quadro Kanban. Esta metodologia não suporta papéis específicos ou um fluxo definido e não impõe limitações no processo de fabricação, como o Sprint no Scrum (GRANULO et al, 2019).
Além disso, de acordo com AHMAD et al (2013, p. 2) “o Kanban limita o trabalho em andamento de acordo com a capacidade da equipe, equilibrando a demanda em relação à produção do trabalho entregue. Isso ajuda a visualizar problemas no processo, reduzir defeitos e manter um fluxo constante”.
3 Metodologia
O presente trabalho foi desenvolvido com base em uma pesquisa aplicada e bibliográfica realizada nos bancos de dados: IEEE Xplore, SciELO e Google Acadêmico, abordando as palavras-chaves “Libras”, “smart glove” e “sign language” além do material fornecido pela biblioteca institucional. Os artigos científicos selecionados foram organizados e catalogados no editor de planilhas Excel, onde foram classificados conforme ano de publicação, palavras-chave, Software e Hardware. Além disso, o processo de pesquisa foi acompanhado de um professor orientador em um período de quatro meses.
No decorrer do projeto foi utilizado o framework Kanban para a implementação de uma metodologia ágil, com o intuito de separar e controlar as atividades durante o desenvolvimento do projeto. Também foi utilizado o Github, um ambiente colaborativo baseado em nuvem para gerenciamento e hospedagem de código-fonte e controle de versão.
Desse modo, os passos definidos a seguir foram realizados em prol de desenvolver um protótipo e obter dados preliminares para sustentação da viabilidade técnica de um projeto.
3.1 Construção do protótipo
Com base nas pesquisas realizadas, definiu-se o uso do sensor MPU-6050 que inclui em seu chip um acelerômetro e um giroscópio para captura de dados de aceleração, curvas e inclinações, além de um sensor SpectraFlex para obtenção de dados da flexão do dedo indicador. Esses sensores foram acoplados a um ESP-32, um microcontrolador programável na linguagem C++.
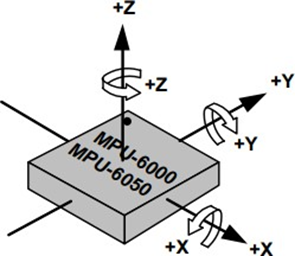
Em uma luva, foi anexado um sensor de flexão de 95 mm na extensão do dedo indicador, assim como o MPU-6050 no centro das costas da mão (Figura 4), ambos os dispositivos foram conectados ao microcontrolador ESP-32 instalado na região do punho da luva. A configuração pode ser visualizada de acordo com o seguinte diagrama elétrico (Figura 5):
Figura 4 – Disposição física dos sensores e microcontrolador
Fonte: IMAGEM AUTORAL (2023)
Figura 5 – Diagrama Elétrico
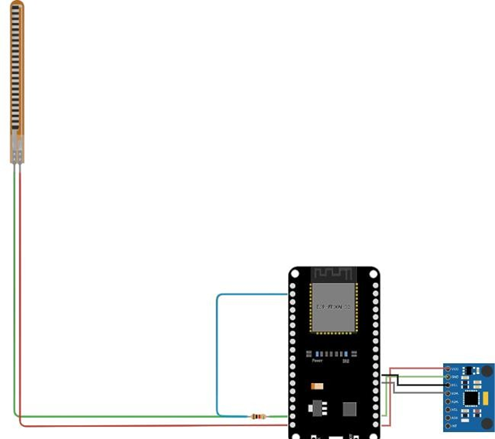
Fonte: IMAGEM AUTORAL (2023)
Após a montagem do protótipo, houve a comunicação dos sensores com o microcontrolador. Nessa etapa, os sensores foram ativados simultaneamente e os sinais exibidos no ambiente de desenvolvimento integrado (IDE) do Arduíno, um software que auxilia no desenvolvimento de código, servindo como plataforma de projetos eletrônicos open-source.
3.2 Obtenção e tratamento de dados
Após a finalização do protótipo, foram utilizados 4 voluntários para a coleta de dados, sendo cada um deles instruído a repetir cinco posições definidas especificamente para a captura de dados preliminares 5 vezes. Os dados capturados foram a posição no eixo X e eixo Y vindos do MPU-6050 e a flexão do dedo indicador vindo do sensor de flexão.
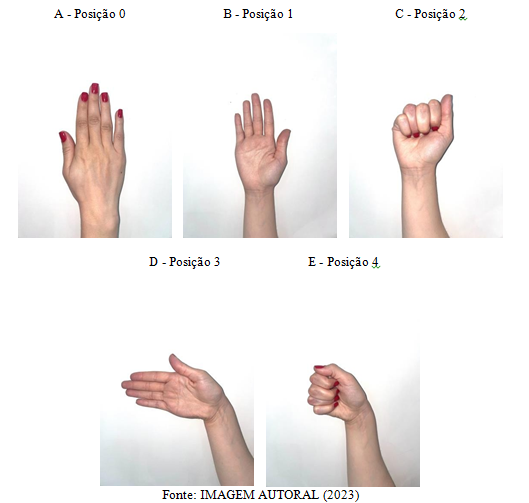
A posição 0 (Figura 6-a) é representada pela mão estendida e em repouso sobre uma mesa. A posição 1 (Figura 6-b) é representada com o braço na vertical e mão aberta, enquanto a posição 2 (Figura 6-c) segue a mesma acomodação de braço, porém com a mão fechada e polegar por fora. Também foram realizadas a posição 3 (Figura 6-d) representada pelo braço na horizontal, mão estendida e com o polegar virado para cima e por último a posição 4 (Figura 6-e) seguindo a mesma orientação da posição 3, porém com a mão fechada.
Figura 6 – Representação das diferentes posições da mão para a coleta dos dados
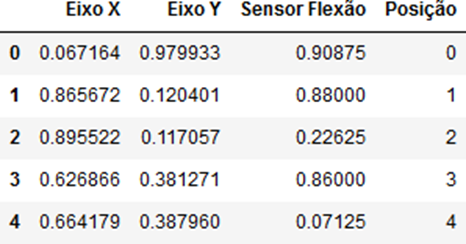
Os dados captados pelos sensores foram inseridos manualmente em uma tabela Excel e relacionados à posição reproduzida conforme a Figura 7. Em seguida, foram exportados para um comma-separated values file (CSV) e utilizados no Jupyter Notebook, uma plataforma de computação web utilizada para escrita de código em linguagem Python e demonstração e interpretação de dados.
Figura 7 – Dados capturados pelos sensores em cada posição

Fonte: IMAGEM AUTORAL (2023)
Os dados foram normalizados (Figura 8), separados na proporção de 70% para treinamento e 30% para teste e embaralhados (Figura 9) para evitar o envio de dados sequenciados para os algoritmos de treinamento.
Os dados separados para teste foram alimentados nos seguintes algoritmos supervisionados e classificadores de inteligência artificial: support vector machine (SVM), modelo que usa uma formulação matemática para identificar o melhor hiperplano que melhor separa as diferentes posições; regressão logística, modelo que utiliza a função logística para prever a posição a partir dos valores recebidos; decision tree, modelo que separa os dados em subsets de uma árvore de decisão e toma decisões baseada no peso de cada valor de entrada para cada divisão da árvore e o random forest, uma expansão da decision tree que cria múltiplas árvores de decisão com diferentes formatos até encontrar a que melhor se encaixa para seus dados.
Figura 8 – Dados capturados pelos sensores e normalizados para cada posição
Fonte: IMAGEM AUTORAL (2023)
Figura 9 – Dados capturados pelos sensores, normalizados e embaralhados para cada posição

Fonte: IMAGEM AUTORAL (2023)
4 Resultados e discussão
Com os algoritmos treinados, foram utilizados 30% dos dados separados para teste para averiguar a precisão de cada um deles. Para isso, a coluna Posição dos dados de testes foi removida e separada, em seguida as colunas Eixo X, Eixo Y e Sensor Flexão foram alimentados aos algoritmos treinados e cada linha da tabela foi classificada em uma das 5 posições possíveis (Figura 10).
Figura 10 – Comparação Posição real e Posição identificada por cada algoritmo
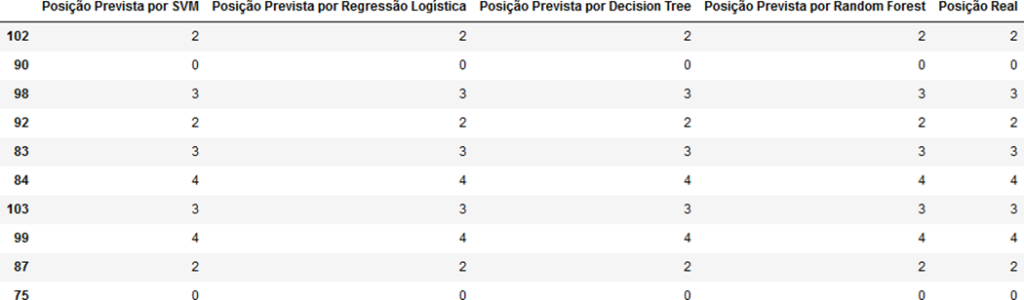
Fonte: IMAGEM AUTORAL (2023)
Assim, a métrica utilizada para encontrar a precisão de cada algoritmo foi uma comparação simples entre a classificação prevista e a classificação real, onde o número de acertos dividido pelo número total de linhas separadas para testes resulta em uma precisão entre 0 e 1.
Como resultado, obtivemos com todos os algoritmos utilizados uma precisão de 1, ou seja, todas as linhas foram classificadas para sua posição corretamente. Esse nível de precisão ocorreu devido às diferenças claras entre cada gesto selecionado, sendo possível visualmente realizar tal classificação (Figura 11).
Figura 11 – Representação das posições separadas por cor e dispostas em relação aos dados coletados pelos sensores
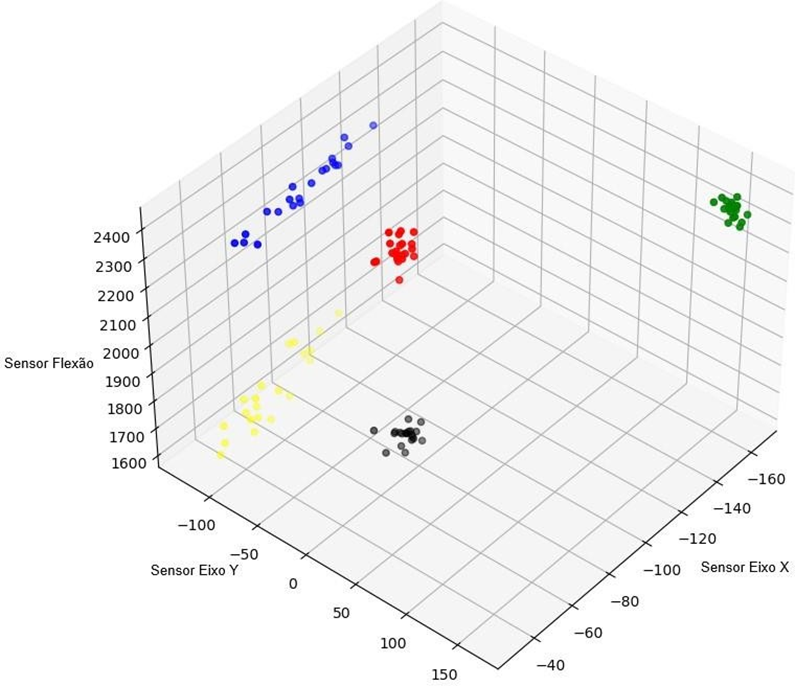
Fonte: IMAGEM AUTORAL (2023)
5 Considerações finais
O objetivo geral era comprovar com a abordagem escolhida o reconhecimento de diferentes gestos, utilizando-se sensores de flexão, acelerômetro e giroscópio para captura de dados e algoritmos de inteligência artificial para classificação.
Ademais, os objetivos específicos em relação ao hardware eram de validar as conexões e comunicação entre sensores e microcontrolador e a capacidade e comportamento dos sensores em um cenário real. Enquanto para o software, o objetivo era validar a transmissão dos dados e a coleta pelo microcontrolador, a eficácia dos ambientes de programação para demonstração e tratamento de dados e por último, a relação dos dados coletados com diferentes algoritmos de inteligência artificial.
Analisando os resultados, conclui-se que tanto o objetivo geral quanto os objetivos específicos foram atingidos, com a ressalva de não ter sido possível identificar qual algoritmo supervisionado e classificador de inteligência artificial melhor se adequa aos dados gerados, já que todos algoritmos atingiram 100% de precisão.
Sendo assim, os próximos passos serão adicionar no protótipo mais 4 sensores de flexão em cada um dos dedos restantes. Além disso, o objetivo geral será de reconhecer as 26 letras do alfabeto de Libras e para isso, novos dados serão coletados, tratados e alimentados nos mesmos algoritmos que os resultados preliminares.
Referências
AGÊNCIA BRASIL: País tem 10,7 milhões de pessoas com deficiência auditiva, diz estudo. INSTITUTO LOCOMOTIVA, 2019. Disponível em: https://ilocomotiva.com.br/clipping/agencia-brasil-pais-tem-107- milhoes-de-pessoas-com-deficiencia-auditiva-diz-estudo. Acesso em: 29 ago. 2023.
AHMAD, Muhammad Ovais; MARKKULA, Jouni; OIVO, Markku. Kanban in software development: A systematic literature review. 2013 39th Euromicro Conference on Software Engineering and Advanced Applications. [S. l.]: IEEE, set. 2013. DOI 10.1109/seaa.2013.28. Disponível em: http://dx.doi.org/10.1109/SEAA.2013.28. Acesso em 19 nov. 2023.
Ambar, R., Fai, C. K., Abd Wahab, M. H., Abdul Jamil, M. M., & Ma’Radzi, A. A. (2018). Development of a Wearable Device for Sign Language Recognition. Journal of Physics: Conference Series, 1019(1).
Disponível em: https://doi.org/10.1088/1742-6596/1019/1/012017. Acesso em 19 nov. 2023.
AWAD, Mariette; KHANNA, Rahul. Support Vector Machines for Classification. Efficient Learning Machines. [S. l.]: Apress, 2015. DOI 10.1007/978-1-4302-5990-9_3.
Disponível em: http://dx.doi.org/10.1007/978-1-4302-5990-9_3. Acesso em: 19 nov. 2023.
BRASIL. Lei nº 10.436, de 24 de abril de 2002. Brasília, DF: Presidência da República, [2002]. Disponível em: https://www.planalto.gov.br/ccivil_03/leis/2002/l10436.htm. Acesso em: 28 ago. 2023.
BREIMAN, Leo; FRIEDMAN, Jerome H.; OLSHEN, Richard A.; STONE, Charles J. Classification And Regression Trees. [S. l.]: Routledge, 2017. DOI 10.1201/9781315139470.
Disponível em: http://dx.doi.org/10.1201/9781315139470. Acesso em: 19 nov. 2023.
CHERKASSKY, V. The Nature Of Statistical Learning Theory. IEEE Transactions on Neural Networks. [S. l.]: Institute of Electrical and Electronics Engineers (IEEE), nov. 1997. DOI 10.1109/tnn.1997.641482. Disponível em: http://dx.doi.org/10.1109/TNN.1997.641482. Acesso em: 19 nov. 2023.
Cristiano, Almir. Alfabeto Manual. Libras, 08 jul. 2020.
Disponível em: https://www.libras.com.br/alfabeto-manual. Acesso em: 02 out. 2023.
FERRAO, Sammara Ellen Renner; DIAS CANEDO, Edna. A study of the applicability of an agile methodology scrum allied to the Kanban method. 2015 10th Iberian Conference on Information Systems and Technologies (CISTI). [S. l.]: IEEE, jun. 2015. DOI 10.1109/cisti.2015.7170382.
Disponível em: https://ieeexplore.ieee.org/document/7170382.
GRANULO, Aida; TANOVIC, Anel. Comparison of SCRUM and KANBAN in the Learning Management System implementation process. 2019 27th Telecommunications Forum (TELFOR). [S. l.]: IEEE, nov. 2019. DOI 10.1109/telfor48224.2019.8971201.
Disponível em: https://ieeexplore.ieee.org/document/8971201. Acesso em: 19 nov. 2023.
GURKAYNAK, Gonenc; YILMAZ, Ilay; HAKSEVER, Gunes. Stifling artificial intelligence: Human perils. Computer Law & Security Review: The International Journal of Technology Law and
Practice, Istambul, Junho 2016.
Disponível em: https://www.sciencedirect.com/science/article/abs/pii/S0267364916300814. Acesso em: 19 nov. 2023.
IBGE – INSTITUTO BRASILEIRO DE GEOGRAFIA E ESTATÍSTICA. PNS 2019: país tem 17,3 milhões de pessoas com algum tipo de deficiência. IBGE, 2021.
Disponível em: https://agenciadenoticias.ibge.gov.br/agencia-sala-de-imprensa/2013-agencia-de-noticias/releases/31445- pns-2019-pais-tem-17-3-milhoes-de-pessoas-com-algum-tipo-de-deficiencia. Acesso em: 29 ago. 2023.
JANI, Abhishek B.; KOTAK, Nishith A.; ROY, Anil K. Sensor Based Hand Gesture Recognition System for English Alphabets Used in Sign Language of Deaf-Mute People. 2018 IEEE SENSORS. [S. l.]: IEEE, out. 2018. DOI 10.1109/icsens.2018.8589574.
Disponível em: http://dx.doi.org/10.1109/ICSENS.2018.8589574. Acesso em: 19 nov. 2023.
Li, W., Pu, H., & Wang, R. (2021). Sign Language Recognition Based on Computer Vision. 2021 IEEE International Conference on Artificial Intelligence and Computer Applications, ICAICA 2021, 919–922.
Disponível em: https://doi.org/10.1109/ICAICA52286.2021.9498024. Acesso em: 19 nov. 2023.
Lima, M. A. S., Lima, G. H. E. L., Neto, R., Santos, J. F., & Vidal, R. R. (n.d.). LIBRAS Translator via Web for Mobile Devices, 2012.
Disponível em: https://ieeexplore.ieee.org/document/6218014. Acesso em: 08 out. 2023.
LORENA, Ana Carolina; DE CARVALHO, André C. P. L. F. Uma Introdução às Support Vector Machines. Revista de Informática Teórica e Aplicada. [S. l.]: Universidade Federal do Rio Grande do Sul, 20 dez. 2007. DOI 10.22456/2175-2745.5690.
Disponível em: http://dx.doi.org/10.22456/2175-2745.5690. Acesso em: 19 nov. 2023.
MPU-6000 and MPU-6050 Product Specification Revision 3.4, InvenSense, San Jose, CA, USA, 2013.
Disponível em: https://datasheetspdf.com/pdf-file/735134/InvenSense/MPU6050/1. Acesso em: 19 nov. 2023.
Simoes Dias, T., Junior, J. J. A. M., & Pichorim, S. F. (2022). An Instrumented Glove for Recognition of Brazilian Sign Language Alphabet. IEEE Sensors Journal, 22(3), 2518–2529. Disponível em: https://doi.org/10.1109/JSEN.2021.3136790. Acesso em: 08 out. 2023.
SHAHEEN, Hina; MEHMOOD, Tariq. Talking Gloves: Low-Cost Gesture Recognition System for Sign Language Translation. 2018 IEEE Region Ten Symposium (Tensymp). [S. l.]: IEEE, jul. 2018. DOI 10.1109/tenconspring.2018.8692069.
Disponível em: http://dx.doi.org/10.1109/TENCONSpring.2018.8692069. Acesso em: 19 nov. 2023.
Souza, M. F. N. S. de, Araújo, A. M. B., Sandes, L. F. F., Freitas, D. A., Soares, W. D., Vianna, R. S. de M., & Sousa, Á. A. D. de. (2017). Principais dificuldades e obstáculos enfrentados pela comunidade surda no acesso à saúde: uma revisão integrativa de literatura. Revista CEFAC, 19(3), 395–405.
Disponível em: https://doi.org/10.1590/1982-0216201719317116. Acesso em: 29 ago. 2023.
SUN, Yuan; ZHANG, Zhihao; YANG, Zan; LI, Dan. Application of Logistic Regression with Fixed Memory Step Gradient Descent Method in Multi-Class Classification Problem. 2019 6th International Conference on Systems and Informatics (ICSAI). [S. l.]: IEEE, nov. 2019. DOI 10.1109/icsai48974.2019.9010220.
Disponível em: http://dx.doi.org/10.1109/ICSAI48974.2019.9010220. Acesso em: 19 nov. 2023.
VALDATI, Aline D. B. Inteligência Artificial – IA. Curitiba: Contentus, 2020.
¹Faculdade Engenheiro Salvador Arena, Centro Educacional da Fundação Salvador Arena
2 Grupo de pesquisa da Faculdade Engenheiro Salvador Arena, Centro Educacional da Fundação Salvador Arena.