ANALYSIS AND PROPOSAL OF AN AUTOMATION IN THE FILM FIXATION PROCESS IN AN INDUSTRY IN THE CITY OF MANAUS
REGISTRO DOI: 10.5281/zenodo.7901286
Arielson Gama Ferreira¹
Maria dos Anjos Fernandes Pacheco²
Érika Cristina Nogueira Marques Pinheiro³
RESUMO
A interação homem-máquina acontece a partir do momento que a máquina pode oferecer uma vantagem para os esforços humanos do trabalho manual e repetitivo. Além disso, o homem ainda precisa saber coordenar todo o seu conhecimento cognitivo para gerenciar, controlar e manipular máquinas para que de fato estas possam se apresentar eficientes no fluxo produtivo. Por isso, o estudo voltado sobre ergonomia está direcionado para reduzir os impactos advindos de trabalhos manuais, sendo que máquinas são criadas para agilizar a produção e também reduzir esforços e movimentos repetitivos. Este artigo tem como principal objetivo desenvolver uma proposta que vise usar o Arduino UNO junto com o motor de passo para reduzir movimentos repetitivos em uma linha de montagem. Trata-se de uma pesquisa exploratória e bibliográfica, realizada em uma indústria no qual busca-se apresentar uma solução para um problema presente na linha de aplicação de película em B-cover. B-cover é o nome dado para o material que faz parte do carregador de celular ou de aparelhos que precisem desse tipo de carregador. O conhecimento voltado para a sociedade acadêmica sobre a possibilidade de usar o Arduino UNO e motor de passo para criar um dispositivo é fundamental para fazer com que cada vez mais novas ideias surjam e possam facilitar atividades laborais dentro de um chão de fábrica.
Palavras-chaves: Arduino. Elétrica. Indústria
ABSTRACT
The human-machine interaction happens from the moment that the machine can offer an advantage to the human efforts of manual and repetitive work. In addition, man still needs to know how to coordinate all his cognitive knowledge to manage, control and manipulate machines so that they can actually be efficient in the production flow. For this reason, the study focused on ergonomics is aimed at reducing the impacts arising from manual work, and machines are created to streamline production and also reduce efforts and repetitive movements. This article has as main objective to develop a proposal that aims to use the arduino UNO together with the stepper motor to reduce repetitive movements in an assembly line. This is an exploratory and bibliographical research, carried out in an industry in which it seeks to present a solution to a problem present in the B-cover film application line. B-cover is the name given to the material that is part of the cell phone charger or devices that need this type of charger. The knowledge aimed at the academic society about the possibility of using Arduino UNO and a stepper motor to create a device is fundamental to make more and more new ideas emerge and to facilitate work activities within a factory floor.
Keywords: Arduino. Electric. Industry
1 INTRODUÇÃO
A indústria possui necessidades diárias que estão voltadas para suas metas de produção. O contato homem-máquina iniciou-se com o intuito de fazer com que as indústrias ganhassem tempo no momento de realizar a fabricação de seus produtos, tornando a máquina um aliado ao colaborador, mas que ainda precisa do controle humano para realizar diversas atividades.
Esse contato muitas vezes resulta em movimentos repetitivos que geram lesões, contribuindo por sua vez com a redução da qualidade de vida dos colaboradores e o surgimento de uma quantidade maior de indenizações a serem pagas pelas empresas, no caso de prejuízos para a saúde do trabalhador no exercício de sua função. Com base nisso, indaga-se: como o Arduino UNO pode colaborar com a ergonomia dentro das indústrias?
Este artigo tem como principal objetivo desenvolver uma proposta que vise usar o arduino UNO junto com o motor de passo para reduzir movimentos repetitivos em uma linha de montagem. Como objetivos específicos, busca-se analisar o uso do Arduino UNO e do motor de passo; analisar o processo de aplicação de película em B-cover em uma indústria; desenvolver uma solução para substituir o movimento de alavanca para poucos movimentos, como acionar um botão.
Justifica-se a importância dessa pesquisa diante a quantidade de doenças ocupacionais que surgem diariamente nas indústrias brasileiras. Visto que, movimentos que solicitem mais esforço de membros superiores, como no caso, esforços empregados para baixar uma alavanca ou suspendê-la, diariamente, diversas vezes, podem gerar danos para e o surgimento de doenças ocupacionais que comprometem a saúde do trabalhador. O conhecimento voltado para a sociedade acadêmica sobre a possibilidade de usar o Arduino UNO e motor de passo para criar um dispositivo é fundamental para fazer com que cada vez mais novas ideias surjam e possam facilitar atividades laborais dentro de um chão de fábrica.
Trata-se de uma pesquisa exploratória e bibliográfica, no qual serão discriminados os movimentos realizados em uma linha de montagem de B-cover, mais conhecido como “fonte de carregador” usados em aparelhos celulares e outros dispositivos para carregá-los em fontes elétricas.
2 METODOLOGIA
Trata-se de uma pesquisa exploratória realizada em uma indústria no qual busca-se apresentar uma solução para um problema presente na linha de aplicação de película em B-cover. B-cover é o nome dado para o material que faz parte do carregador de celular ou de aparelhos que precisem desse tipo de carregador. Como pode-se observar sua característica física na figura 1, abaixo:
Figura 1 : B-cover na indústria

Além disso, foi realizado o embasamento teórico voltado para os movimentos que são realizados na linha de produção no qual se destina a automatização do processo através de uma proposta de um protótipo que possa reduzir os movimentos e tornar a linha de aplicação da película adequada nos padrões da ergonomia. Para o desenvolvimento do embasamento foram realizadas pesquisas em artigos científicos, livros e teses porque existem pesquisas de significativa relevância para o desenvolvimento da pesquisa. As fontes selecionadas foram publicadas em um período de até 10 anos, no período de 2013 a 2023. Foram realizadas pesquisas em base de dados tais como Scielo e Google Acadêmico para a seleção de artigos, dissertações e teses e consulta de livros que embasam a ergonomia e a relevância da redução dos movimentos para a aplicação de película no B-cover.
Através da mesma pesquisa também foi realizado um estudo de caso, utilizando-se de uma pesquisa qualitativa voltada para o setor de aplicação de película B-Cover. A análise qualitativa voltada para os movimentos dos operadores que trabalham na esteira de aplicação, identificando com isso características voltadas para movimentos repetitivos e riscos de doenças ocupacionais por causa da quantidade de movimentos realizados para aplicar a película.
Dessa maneira, destaca-se abaixo o fluxo da pesquisa realizada conforme figura 2, abaixo:
Figura 2 : Fluxo da pesquisa a ser apresentada
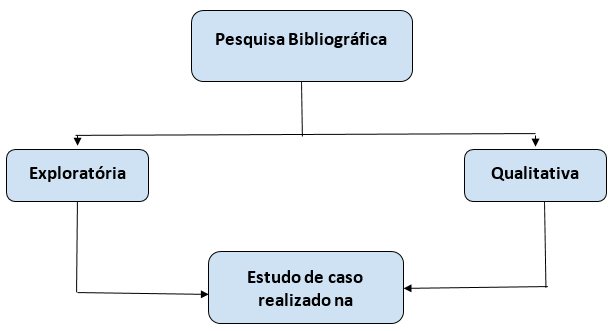
Primeiramente será realizada a pesquisa bibliográfica conforme os critérios adotados para a seleção de estudos e citações para embasamento teórico. Depois será feita a pesquisa exploratória in loco com a finalidade de coletar dados e realizar a observação na forma como é realizada a aplicação de película, sendo neste processo a problemática da pesquisa. Dessa maneira também será realizada uma pesquisa qualitativa a partir dos resultados do que for coletado através da aplicação de questionário com colaboradores. Por último, será desenvolvida a proposta de automatização para o processo com o intuito de reduzir a quantidade de movimentos e desenvolver uma solução elétrica e automatizada para os colaboradores da respectiva empresa.
3 REVISÃO BIBLIOGRÁFICA
3.1 Sistema homem-máquina
O homem quando passou a ter contato com máquinas, começou a dividir com estas as suas jornadas de trabalho, interagindo e compartilhando o mesmo processo produtivo, com a finalidade de juntos reduzirem o tempo e aumentarem a eficiência da produção. No entanto, foi necessário conhecer todas as funcionalidades da máquina para conseguir torná-la útil para as atividades laborais, sendo ainda limitada às decisões humanas para que possa realizar uma determinada atividade (PINHEIRO; FRANÇA, 2016).
No entanto, não basta somente criar uma solução para automatizar um fluxo. Faz-se necessário compreender como a máquina de fato pode ser útil para o trabalho humano. O entendimento precisa ser aprofundado ao ponto que possa ser superado todos os desafios ergonômicos que surgem com novas alternativas mais modernas, complexas e ao mesmo tempo dinâmicas (FALZON, 2013).
Assim, a interação homem-máquina acontece a partir do momento que a máquina pode oferecer uma vantagem para os esforços humanos do trabalho manual e repetitivo. Além disso, o homem ainda precisa saber coordenar todo o seu conhecimento cognitivo para gerenciar, controlar e manipular máquinas para que de fato estas possam se apresentar eficientes no fluxo produtivo. Por isso, o estudo voltado sobre ergonomia está direcionado para reduzir os impactos advindos de trabalhos manuais, sendo que máquinas são criadas para agilizar a produção e também reduzir esforços e movimentos repetitivos (ILDA,2015).
3.2 Aspectos ergonômicos físico-ambientais
As máquinas foram sendo criadas para tornar processos produtivos mais rápidos, contudo surgiram outras preocupações voltadas para a ergonomia, que é tornar o uso de maquinários apropriado para a relação homem-máquina, levando em consideração todos os detalhes considerados significativos tais como som, ruído, temperatura, luminosidade, cores, proteção contra acidentes. Diante disso, a Norma reguladora 17 (NR-17) foi criada para trazer preocupações voltadas para os limites de ruídos, discriminado também pela NR 10152. O ruído é caracterizado como um som desagradável que, se tornando rotineiro, pode prejudicar a saúde do colaborador, visto que este está exposto diretamente com a máquina e seu som. A ergonomia cita valores inferiores a 80 decibéis (dB), porém se a máquina ou ambiente oferecer um som superior a 80 dB, a quantidade de horas precisa ser reduzida para no máximo quatros horas de trabalho. Assim, esses limites precisam ser obedecidos pois uma exposição longa a ruídos colabora para problemas audiológicos no ser humano. Outros efeitos também aparecem como aumento da temperatura, aceleração dos batimentos cardíacos dentre outros (FRIED et al.,2013).
Além disso, o excesso de movimento repetitivos causam lesões que acometem o sistema musculoesquelético, que por sua vez, por precisar realizar o mesmo movimento diariamente o músculo não tem tempo de recuperação e de repouso. Essa ocorrência contribui para o surgimento de Lesões por Esforço Repetitivos (LER) e DORT (Distúrbios Osteomusculares Relacionados ao Trabalho), que surgem a partir dessa repetição que ocorre com atividades dentro de processos industriais (ZAVARIZZI et al., 2019).
Sendo assim, a NR-17 se apresenta como uma referência na questão da carga e sobrecarga dos músculos no momento da realização das atividades laborais. Cita-se a região do pescoço, ombro, dorso e membros inferiores para que possam ser realizadas análises ergonômicas voltadas para o trabalho que está sendo realizado. A saúde no trabalho precisa ser levada em consideração, podendo inclusive ser alvo de análise para efeito de remuneração e vantagens perante à função empregada. Entende-se que a ocorrência de LER/Dort em grande número de pessoas conduziu as empresas a pensarem sobre as condições de trabalhos repetitivos e pesados, principalmente os que empregam uma quantidade de esforço físico (BRASIL, 2012).
3.3 Influência da ergonomia na Automação Industrial
A automação é uma tecnologia que reúne mecânica e eletrônica em uma solução que busca auxiliar o ser humano a realizar atividades de forma melhorada na sua atividade laboral, oferecendo também segurança para os processos industriais que envolvem a manipulação de pessoas em fabricação ou montagem de produtos. A maior motivação da automação é buscar soluções que possam tornar procedimentos mais rápidos e práticos, com o menor esforço humano, melhorando com isso a flexibilidade dos processos, reduzindo os custos operacionais e gerando empresas cada vez mais competitivas no mercado (MARCAL; GUIMARÃES; RESENDE, 2013).
Esses fatores evidenciam os investimentos altos realizados na automação de indústrias, mais precisamente como uma busca de segurança de processos industriais e de infraestrutura, pois a automação também é vista como uma forma de reduzir falhas humanas na produção. Com essa vantagem, cada vez mais a presença de automação na indústria vem aumentando por causa do principal motivador, que é, maior qualidade dos processos e uma flexibilidade dos mesmos. O crescimento de automações chega a proporções cada vez maiores, sendo considerada atualmente como instrumento fundamental para a produtividade dentro das indústrias (SILVA et al., 2018).
A influência da ergonomia na automação das indústrias está na posição dos equipamentos e na quantidade de repetições que as manipulações exigem. Dentro desse contexto, existem atualmente estudos e pesquisas que apresentam meios para evitar com que os movimentos repetitivos possam não se tornarem mais tão prejudiciais para a saúde muscular dos operadores. O conhecimento voltado para a ergonomia e, mais precisamente, NR-17 permite com que a empresa saiba evitar mais prejuízos à saúde humana (ZAVARIZZI; CARVALHO;ALENCAR, 2019).
Diante disso, os modelos físicos básicos que envolvem o lugar onde o operador vai ficar a maior parte do seu tempo realizando os movimentos, são importantes pois se estiverem mal elaborado com distanciamentos incorrentes podem prejudicar a longo prazo o indivíduo que está realizando sus atividade laborais diariamente, Visto que, se a pessoa opera sentada a altura lombar deve estar de acordo com a encosta da cadeira, a altura do cotovelo precisa estar na direção da mesa ou do apoio, sendo que, se faz necessário que exista uma altura entre a coxa e a mesa. Quando se trata de trabalhar olhando para algum monitor, a tela do mesmo precisa estar na direção da altura do mesmo, assim o alcance das pernas e dos braços devem estar confortáveis (ILDA, 2015).
Considerando-se os padrões advindos da antropometria, todos os envolvidos saem beneficiados, visto que para o primeiro se apresenta importante trabalhar em um ambiente que seja confortável e adaptado para a sua saúde a longo prazo. Para o segundo, se torna importante para assegurar a empresa processos trabalhistas decorrentes de doenças ocupacionais, permitindo também com que aumente a produtividade do indivíduo (ILDA, 2015).
Para que seja possível alcançar insumos ou objetos de uma mesa, pode-se considerar a seguinte ilustração da figura 3, abaixo:
Figura 3 : Áreas de alcance ótimo e máximo
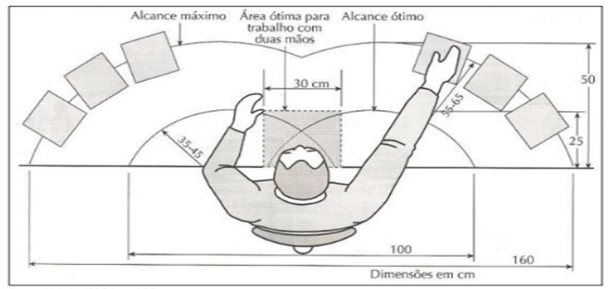
Levando em considerações os padrões que são estabelecidos pelas normas reguladoras voltadas para a antropometria, tanto o trabalhador quanto a indústria passam a ser beneficiados, pois a atividade laboral passa a ser realizada de forma eficiente.
3.4 Principais dispositivos da automação elétrica
A indústria precisa de maquinários para agilizar o processo manual da força humana. Diante a isto, alguns itens elétricos compõem soluções que se apresentam de baixo custo e que auxiliam na redução de movimentos humanos, contribuindo com a ergonomia nas atividades laborais dentro da indústria. De acordo com Schettino et al., (2022), os fatores ergonômicos influenciam diretamente na produtividade homem-máquina, colaborando para que existam perdas operacionais. Diante a isto, trabalhos que apresentam risco ergonômico apresentam baixo aproveitamento da força de trabalho.
De acordo com Casaro et al., (2022) a automação dos processos permite com que os mesmos deixem de ser manuais. Com isso, reduz-se a quantidade de erros possíveis que trazem prejuízos para a produção e retrabalho para o colaborador. Com processos automatizados as atividades se tornam mais seguras e eficazes.
Nesse contexto, o processo de automação traz consigo potenciais ideias que permitem com que processos mais complexos possam ser eficientes. Como acontece com a inclusão de tecnologias robóticas que atuam de forma colaborativa com o homem. Sua função é de potencializar a produção se tornando um auxiliar, permitindo com que os processos possam ser mais rápidos, evitando com isso com que o colaborador fique sobrecarregado com atividades laborais no momento da produção (COSTA; DUARTE; BILÉN, 2021.
3.4.1 Microcontrolador arduino
A automação pode utilizar-se de microcontroladores, que por sua vez, representam um circuito elétrico de baixo custo, que é composto por: memória programável para leitura, que chega a armazenar “variáveis” utilizadas por programas instalados; CPU, que por sua vez ajuda a interpretar e executar comandos dos programas que são instalados. Além disso, existem outros dispositivos que atuam na entrada e saída, com a finalidade de controlar dispositivos externos ou ainda, receber sinais pulsados de chaves e sensores. Faz parte da automação também temporizadores, contadores e canais de comunicação serial.
De acordo com Aureliano (2017) os microcontroladores estão presentes no cotidiano de milhares de pessoas. Fazem parte da construção elétrica e eletrônica de equipamentos domésticos como microondas, controle remoto, aparelho televisor ou até mesmo, ar condicionado. Além disso, podem fazer parte da composição de um relógio digital, Drone, uma impressora 3D.
Assim, pode-se destacar que o microcontrolador é uma plataforma que foi criada para se transformar em um recurso auxiliar na montagem de protótipos robôs. Seu surgimento na indústria e em automações residenciais começaram a ser comercializadas no ano de 2005, por Massimo Banzi e David Cuartielles, passando a ser um dispositivo vendido no meio acadêmico e industrial por diversos fabricantes, por causa da sua facilitada utilização (MONK, 2013).
3.4.2 Arduino UNO
Esse microcontrolador se tornou conhecido pela sua facilidade de construir soluções robóticas simples para processos industriais ou ainda residenciais. A construção de uma automatização robótica pode acontecer quando junta-se o arduino UNO a outros itens permanentes que podem colaborar na tarefa a ser desenvolvida, sendo necessário somente retirar a placa do microcontrolador, inserindo-a em um circuito próprio (MICROBERTS, 2011).
Sendo assim, o que permite com que o Arduino UNO seja uma versão reconhecida de diferentes versões anteriores é que pode-se utilizar um controlador USB diferenciado. Este consegue alcançar uma comunicação mais veloz com o CPU e oferece facilidade na hora de sua instalação (MONK, 2013).
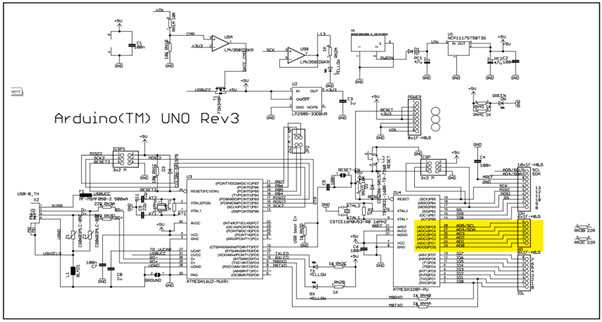
O Arduino UNO tem uma série de facilidades que permite a comunicação com outros microcontroladores. Dessa forma, pode-se citar o modelo AT Mega 328 que por sua vez fornece comunicação serial que está disponível nos 16 pinos digitais 0 (RX) e 1 (TX). Outro modelo, AT Mega16U2 fornece comunicação serial através da USB e aparece como uma porta COM virtual para o software no computador. Destaca-se ainda que o firmware 16U2 usa os drivers COM USB padrão e não precisa de driver externo é necessário. O software Arduino inclui um monitor serial que, por sua vez, permite que dados simples de texto sejam enviados do computador para a placa Arduino. Assim, os LEDs RX e TX da placa piscam quando os dados estão sendo transmitidos através do chip USB-to-serial e conexão USB para o computador. Toda a estrutura elétrica do Arduino UNO pode ser observada de acordo com a figura 4, abaixo:
Figura 4 : Estrutura elétrica do Arduino UNO
4 ESTUDO DE CASO
A pesquisa foi realizada em duas etapas, primeiramente foi necessário realizar um mapeamento do processo produtivo para entender qual a problemática. Através de um colaborador interno foi possível coletar informações de como é realizado o processo de aplicação de película. Contudo, devido a normas internas da organização não foi autorizado uma visita técnica no processo produtivo, sendo limitada a entrevista a um colaborador do processo e a um líder para coletar as informações adquiridas, necessárias para o desenvolvimento de uma proposta de solução voltada para os itens que foram encontrados.
Com isso, obteve-se o conhecimento de que os colaboradores passaram a maioria do tempo de sua produção em posições que poderiam permitir o surgimento de doenças ocupacionais. Visto que, os colaboradores, para realizar a aplicação da película permanecem uma hora sentados com intervalos de 20 minutos. Contudo, quando o colaborador está sentado perante ao balcão, realiza movimentos repetitivos de ligar o maquinário, produzindo com os movimentos praticados 1920 peças. No entanto, para produzir 1920 peças são necessários 1920 movimentos exercendo força, por cada operador, pois no momento que o operador pega o insumo, insere na máquina e precisa acionar uma alavanca de 90o graus, exercendo sua força cerca de 1920 vezes, que resulta em uma somatória de movimentos repetitivos que podem contribuir para uma LER/DORT.
Mesmo o colaborador tendo uma máquina que cole a película no B-cover, o funcionamento desse maquinário não auxilia o operador nos seus movimentos, apenas agiliza o processo produtivo, precisando de movimentos manuais repetitivos para que suas ações sejam acionadas. Uma solução para auxiliar o operador, atuando como um robô colaborativo seria uma solução adequada para os movimentos humanos nesse momento.
Ocorre que, quando o colaborador realiza todo esse procedimento e resulta em uma peça com defeito, o colaborador exerce novamente o mesmo esforço (duplicado) para que exista no fim do seu turno as 1920 peças intactas. A peça defeituosa é coletada pela equipe da qualidade, cabendo a esta decisão o descarte ou não. Contudo o colaborador, para compensar a peça descartada, terá que realizar mais movimentos repetitivos.
4.1 Proposta de implementação do processo de aplicação de película B-Cover
4.1.1 Programação do software da placa do microcontrolador
De acordo com as informações coletadas nas observações e na entrevista foi desenvolvida uma proposta voltada para a criação de uma automação utilizando-se de itens de baixo custo como Arduino Uno e Motor de Passo. A placa de Arduino Uno pode ser conectada através de cabo USB AB. Para isso, faz-se necessário conhecer as principais características do Arduino UNO sugerido para a criação de uma automação para o problema encontrado, levando em consideração que é o menor custo encontrado em pesquisas no mercado. As características podem ser destacadas na tabela 1, abaixo:
Tabela 1 : Características do Arduino UNO
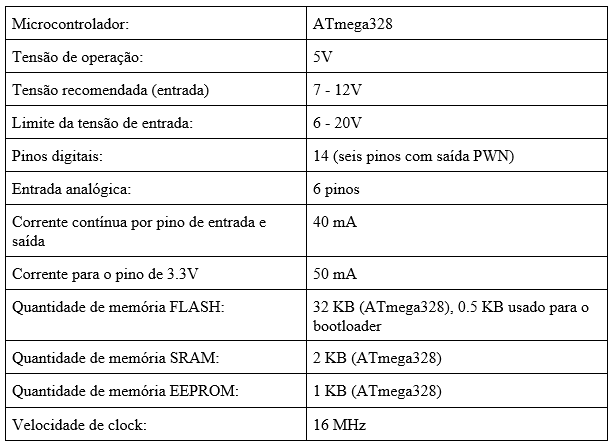
Como fonte de alimentação para o microcontrolador Arduino UNO, cita-se a fonte externa DC, que pode ser ligada diretamente nos pinos Vin, para que possa transmitir energia ao ser acionado o botão.
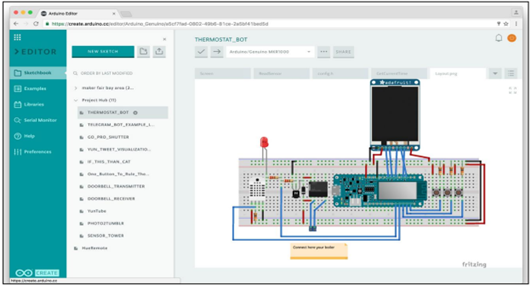
Para a instalação da placa do microcontrolador é necessário acessar o site: https://www.arduino.cc/. Esse site permite com que sejam feitas edições no programa através do Arduino Create, atualizada do IDE, que por sua vez, permite com que os programadores possam fazer todos os procedimentos através da nuvem, tal como configurar a placa, além disso pode-se compartilhar seus projetos de programação com outros editores.
Depois de iniciar o programa deve-se escolher a placa dentro do menu das ferramentas. Entende-se que o arduino UNO precisa ter comunicação tanto com o computador quanto com a placa do microcontrolador. Depois que todo esse processo é realizado, o hardware sinaliza através dos LEDs RX e TX, no qual começam a piscar e logo em seguida aparece na tela do computador a mensagem constando que a transferência do programa foi concluída. Depois de alguns instantes o LED do pin 13 começa a piscar da cor laranja, evidenciando que o hardware e o software já estão acoplados e prontos para serem programados. Esse processo pode ser ilustrado de forma real pela figura 5, abaixo:
Figura 5 : Processo de programação através da plataforma da Arduino
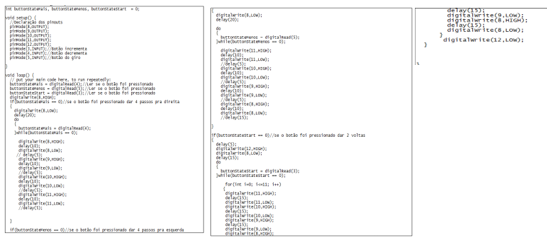
Depois dos passos citados anteriormente, inicia-se a conexão do Arduino com o motor de passo PM55L-048, que é um modelo mais comum e de baixo custo. Criando-se a chamada “stepsPerRevolution”, para que seja possível projetar a quantidade de passo e definir as portas que serão utilizadas, iniciando a biblioteca. Após esse procedimento, inicia-se o acionamento das bobinas do motor, entrando em um estado de Loop, criando-se estruturas de repetição para que pudessem ser usadas como temporizador do motor. Esse comando, por sua vez, colabora para que o motor consiga rodar tanto no sentido horário quanto no anti-horário. Com todos os dispositivos conectados, precisa-se inserir o código com Arduino, conforme figura 6, abaixo:
Figura 6 : Programação do Arduino UNO
Com a ajuda da ferramenta Autocad, chegou-se a um protótipo do que seria um dispositivo auxiliar para reduzir o esforço do operador na hora de aplicar a película. Para isso, seria necessário acoplar o motor de passo, como evidencia-se na figura 7, abaixo:
Figura 7 : Protótipo desenvolvido no Autocad
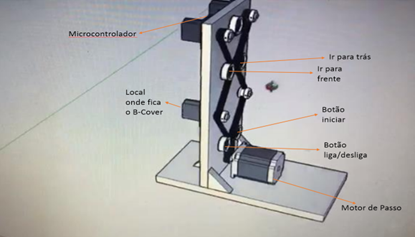
A proposta envolve retirar o uso da alavanca para empregar força no momento de aplicar a película no B-cover. Com o dispositivo o colaborador insere o B-cover, com a máquina ligada, controla o movimento do local de inserção do B-cover para frente ou para trás, para este ser inserido. Ao clicar no botão iniciar, aciona toda a parte elétrica do dispositivo no qual manda informações para o motor de passo, através do Arduino UNO e com isso, a parte superior em direção do local onde insere o B-cover iria descer e pressionar a película e soltar com a mesma aplicada. Visto que, com a placa Arduino Uno conectada ao motor de passo, permite com que o rolamento proporcione o acionamento da pressão na película.
Com o dispositivo a redução dos esforços permitiria mais produção e menos cansaço, fadiga ou riscos de doenças ocupacionais. Pode-se observar uma comparação dos resultados com a implementação, conforme tabela 2:
Tabela 2 : Comparação dos resultados produtivos antes e depois do dispositivo
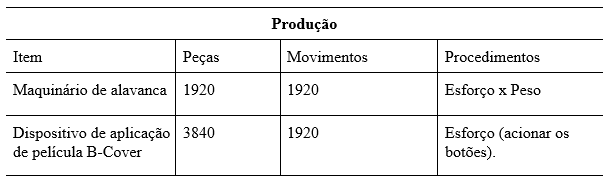
Antes, o operador precisava puxar a alavanca para realizar a aplicação de uma película em uma peça. Com o dispositivo que possui espaço para inserir dois B-covers, acionando o botão de iniciar é possível realizar a aplicação da película em dois itens ao mesmo tempo. Pois quando acionar o botão, o motor de passo é acionado e recebe informações do microcontrolador Arduino UNO e começa a gerar pressão sob a película.
A tabela acima evidencia o quanto é relevante o uso do Arduino UNO em junção com o motor de passo, mesmo sendo itens de baixo custo oferecem possibilidades de construção de dispositivos que podem ser úteis tanto em residências quanto dentro da indústria, para reduzir movimentos repetitivos. Assim, a engenharia elétrica busca soluções elétricas que podem utilizar da mecânica para solucionar problemas na sociedade.
5 CONSIDERAÇÕES FINAIS
A automação industrial se apresenta como um estudo que está direcionado para a facilitação dos processos produtivos. Estudar mecanismos de como melhorar atividades laborais colabora tanto com a indústria quanto com os colaboradores permitindo com que possa ser reduzido movimento repetitivos que permitem o surgimento de doenças ocupacionais.
O Arduino UNO é um item que envolve comandos elétricos que atualmente é estudado em diversos níveis de escolaridade. Nos dias atuais, crianças aprendem a manipular o arduino UNO criando pequenos robôs, evidenciando um campo amplo para o seu uso tanto residencial quanto industrial. Por isso, a indústria de automação pode construir dispositivos utilizando Arduino, por ser um material de baixo custo, consegue tornar o acesso a automação mais facilitado para toda a sociedade.
O conhecimento sobre ergonomia, permitiu com que fossem analisadas soluções que podem ser empregadas em qualquer indústria ou atividade que necessite realizar movimentos com esforço excessivo, como puxar uma alavanca. Através do uso da ferramenta Autocad foi possível criar um protótipo virtual, visto que o protótipo físico iria requerer a atuação de um ferramenteiro para obter uma estética mais voltada para implantação na linha de montagem.
A proposta está voltada em mostrar que é possível usar o Arduino UNO e o motor de passo para a criação de um dispositivo que facilite as atividades laborais dentro da indústria. Sendo assim, a pesquisa esteve voltada para análise do uso do Arduino UNO e do motor de passo em soluções práticas dentro do setor industrial.
Para isso, foi criado um protótipo no Autocad para mostrar como seria o dispositivo e quais funcionalidades teria que exercer para agilizar a aplicação da película B-cover. Com isso, pode-se observar que um dispositivo que atenda duas peças por vez, onde o operador apenas terá que dispor do esforço de aperta o botão iniciar evidencia uma produção ainda maior, com menos riscos de doenças ocupacionais.
Sugere-se para estudos posteriores, criação física de um dispositivo que seja colaborativo com o operador no momento de aplicar peças dentro do setor industrial, reduzindo movimentos e respeitando todas as normas reguladoras que envolvem ambiente, espaço e movimentos humanos.
REFERÊNCIAS
AURELIANO, A. Microcontroladores. Fiozera. 2017. Disponível em:<https://fiozera.com.br/microcontroladores-914a59cbf7de>. Acesso em: 26 de mar. 2023.
BRASIL, Ministério do Trabalho. Secretaria de Inspeção do Trabalho. Departamento de Segurança e Saúde no Trabalho. Nota Técnica 060/2001. Assunto: Ergonomia – indicação de postura a ser adotada na concepção depostos de trabalho. Brasília, 2012.
FALZON, Pierre. Ergonomia. 2. Ed. São Paulo: Edgar Blücher, 2012.
FRIED, Yitzhak. The joint effects of noise, job complexity, and on employee sickness absence: an exploratory study across 21 organization the Cordis study. Journal of occupational and Organizational psychology. Leicester, June 2013.
IIDA, Itiro. Ergonomia: Projeto e Produção. 2.ed. São Paulo: Edgard Blücher, 2015.
MARCAL, Leandro Flor.; GUIMARÃES, Marco Paulo.; RESENDE, André Alves De. Automatização De Uma Termoformadora Visando Melhorias No Processo Produtivo De Uma Empresa Fabricante De Peças Termoplásticas Para O Setor Automobilístico. Enegep, Salvador-BA, 2013. Disponível em: https://abepro.org.br/biblioteca/tn_sto_238_383_34692.pdf. Acesso em: 26 de março de 2023.
MCROBERTS, Michael. Arduino básico. 1 ed. São Paulo: Novatec, 2011. Disponível em: https://cepein.femanet.com.br/BDigital/arqTccs/1011330043.pdf. Acesso em 25 de março de 2023.
MONK, S. Programação com Arduino: Começando com Sketches. 1. ed. Bookman, 2013.
PINHEIRO, Ana Karla da Silva; FRANÇA, Maria Beatriz Araújo. Ergonomia aplicada à anatomia e à filosofia do trabalhador. Goiânia: AB, 2006.
SCHETTINO, S.; MINETTE, L.J.; SORANSO, D.R.; LIMA, R.C.A. Influência de fatores ergonômicos na produtividade do sistema homem-máquina na colheita florestal mecanizada. Scientia Forestalis, v.50, e3779, 2022.
SILVA, A.L.E.; SILVEIRA, T.;MORAES, A.R.; BRUM, T.M.M. Proposta de automação industrial em uma empresa fabricante de borrachas escolares. Revista Geintec, v.8, n.1, jan, fev, mar, 2018.
ZAVARIZZI, C.P.; CARVALHO, R.M.M.; ALENCAR, M.C.B. Grupo de trabalhadores acometidos por LER/DORT: relato de experiência. Cad. Bras.Ter.Ocup. São Carlos, v.27, n.3, 2019.
¹Graduando em Engenharia Elétrica pela Universidade Nilton Lins (UNL)-Instituição: Universidade Nilton Lins (UNL)-Endereço: Av. Prof . Nilton Lins, 3259, Flores, Manaus – AM/E-mail: aryelsongama@hotmail.com
²Docente em Engenharia Elétrica pela Universidade Nilton Lins (UNL)-Instituição: Universidade Nilton Lins (UNL)-Endereço: Av. Prof . Nilton Lins, 3259, Flores, Manaus – AM/E-mail: ma.dp@uol.com.br
³Docente em Engenharia Elétrica pela Universidade Nilton Lins (UNL)-Instituição: Universidade Nilton Lins (UNL)-Endereço: Av. Prof . Nilton Lins, 3259, Flores, Manaus – AM/E-mail: erikamarquespinheiro@gmail.com