ROBOTIC HAND WITH ASSISTED ELECTROMECHANICAL DRIVE AND HUMAN MACHINE INTERFACE FOR MOVEMENTS OF HUMAN HAND REPRODUCTION
REGISTRO DOI: 10.5281/zenodo.7339695
Bruna Costriuba¹
Julia Meger¹
Luiz Gustavo Mello¹
Yuri Rodrigues¹
Carlos López Noriega²
Resumo
O principal objetivo do trabalho foi o desenvolvimento de uma mão robótica que, por meio de microcontroladores acoplados a uma luva, conseguisse replicar os movimentos realizados por um usuário, permitindo a manipulação de objetos e materiais que apresentassem um risco ao ser humano de forma segura. A estrutura da mão foi concebida em ambiente virtual, em que os principais testes de movimento e resistência foram realizados, para posteriormente ser realizada a impressão dos componentes utilizando a técnica de Impressão 3D em resina. Em seguida, foram acoplados servos motores nas principais articulações do protótipo, permitindo seu movimento. A luva contou com a utilização de potenciômetros e molas para a captação de movimento, além de também ter tido alguns de seus componentes concebidos pela Impressão 3D.
Palavras-chave: Mão robótica, Reprodução de movimentos, Impressão 3D, Microcontroladores.
Abstract
The main objective of this work was the development of a robotic hand that, through microcontrollers coupled to a glove, could replicate the movements performed by a user, allowing the manipulation of objects and materials that present a risk to the human being in a safe way. The hand structure was designed in a virtual environment, in which the main movement and resistance tests were carried out, to later print the components using the technique of 3D printing in resin. Subsequently, servo motor were attached to the main joints of the prototype, allowing its movement. The glove used potentiometers and springs to capture movement, in addition to having some of its components designed by 3D printing.
Keywords: Robotic hand, Motion Reproduction, 3D printing, Microcontrollers.
1 Introdução
A mão é uma das maiores ferramentas do ser humano, possibilitando realizar desde tarefas básicas até as mais complexas e precisas que, junto a nossa inteligência e capacidade de adaptação, permitiu que nos desenvolvêssemos como espécie, nos destacando das outras formas de vida presentes em nosso planeta . Em especial, a mão nos permitiu o manuseio de ferramentas que nos auxiliaram com a nossa sobrevivência ao longo das eras, permitindo a evolução da espécie humana até os dias atuais (L. SUNDFELD J. L. C. NOGUEIRA, 2006).
Este instrumento pode ser estendido para uso em necessidades contemporâneas como o manuseio de materiais radioativos ou tóxicos. Atualmente, existe uma limitação de recursos especializados para manipulação destes itens, tendo muitas vezes o foco na aversão ao invés da blindagem específica para efetuar pesquisas, gerando uma demanda para este tipo de equipamento. Algumas companhias desenvolveram joysticks de comando de ferramentas de perfuração, colocação/retirada de parafusos entre outros para reciclagem de resíduos radioativos voltados para usinas de geração de energia nuclear, porém ainda há a limitação de movimento destes engenhos (ANDRÉ FELLIPE CAVALCANTE SILVA, 2015).
Com o avanço da tecnologia, principalmente nas últimas décadas, pôde-se notar um aumento nas pesquisas e no desenvolvimento de membros robóticos. Na medicina, este tipo de pesquisa tem como intuito construir e desenvolver próteses cada vez ergonomicamente adaptadas e mais próximas das capacidades de um membro real. Dentro dessa área, há uma gama que utiliza a robótica e destaca-se pois visam desenvolver mãos robóticas para a implementação em próteses de maior desempenho e número de graus de liberdade, aumentando a qualidade de vida das pessoas que necessitam destes dispositivos e permitindo sua implementação em robôs humanóides ou robôs controlados à distância para realizar tarefas de demasiado perigo à integridade do operador, como desarmar bombas e manipular substâncias tóxicas ou radioativas.
Visando contribuir com o desenvolvimento e com as pesquisas das mãos robóticas, o presente trabalho tem como objetivo desenvolver e testar um protótipo de mão robótica com 8 graus de liberdade atuada por mecanismo eletromecânico e controlada por uma interface humano-máquina, a fim de obter dados quantitativos e qualitativos para compreender quais movimentos o protótipo alcança com êxito, quais serão suas limitações e qual será a eficiência da interface elaborada para o controle.
Outros objetivos do trabalho serão determinar se a mão robótica desenvolvida poderia ser implementada de forma eficaz em indústrias ou centros de pesquisas, bem como em aplicações de controle assistido e até que ponto vai a sua eficiência de modo que pesquisas futuras possam tomar os resultados obtidos como ponto de partida para o avanço deste tipo de estudo.
1.1 Justificativa
Equipamentos especializados para auxiliar no manuseio de elementos radioativos ou tóxicos são escassos e limitados comparado com a demanda do mercado, ainda mais quando voltados a manipulação destes elementos invés da prevenção ao contato, de acordo com a companhia Kuka.
Com a solução de uma mão robótica com uma luva sensorial capaz de copiar os movimentos de uma mão humana, esse protótipo seria capaz de trazer visibilidade para a engenharia mecânica e biomédica referente aos estudos de próteses de membros superiores e manipulação mais precisa de objetos e materiais, resultando em futuros mecanismo com maior adaptabilidade e número de graus de liberdade.
1.2 Objetivos (Geral e específicos)
1.2.1 Geral
Conceber estudos visando identificar os movimentos que caracterizam a mão e o pulso humano, para posteriormente confeccionar um modelo virtual em 3D com 8 graus de liberdade, objetivando construir e apresentar, por meio da técnica de Impressão 3D em resina, uma mão robótica com funcionamento por microcontroladores que possam atuar em situações de risco, e verificar a precisão dos movimentos realizados pelo protótipo quando comparados com uma mão humana.
1.2.2 Específicos
- Identificar os movimentos que caracterizam a mão e pulso humano;
- Modelar uma mão robótica com 8 graus de liberdade com base nos movimento identificados;
- Verificar mediante a testes com o protótipo a acuracidade com os movimentos feitos pela mão humana.
2 Revisão Bibliográfica
A radiação sempre esteve presente em nossas vidas, seja ela proveniente do sol e estrelas ou de substâncias emissoras de radiações como o urânio e o rádio (DIAS; 2022). Após o descobrimento dos raios-X por William Röentgen em 1895, os estudos e pesquisas na área de radiação ganharam grandes nomes como o casal Pierre, Marie Curie e Ernest Rutherford (HEILBRON; MORO; XAVIER; 2006;). Apesar de importantes descobertas que colaboraram com o desenvolvimento de diversas tecnologias úteis e essenciais para a atualidade, ainda não eram conhecidos os efeitos biológicos negativos da radiação ionizante.
Segundo Heilbron, Moro e Xavier (2007; p. 33), “durante as décadas seguintes, foi acumulado um grande número de informações sobre os efeitos maléficos da radiação ionizante e, conseqüentemente, sobre a necessidade de regulamentar a exposição de indivíduos à essa radiação bem como de aprimorar as técnicas empregadas pelo uso de colimadores, filtros, blindagens para atenuação, etc”.
Em circunstâncias mais críticas, “no caso de exposição de seres humanos a altas doses de radiação, como em acidentes nucleares, uma grande parte das células do corpo é afetada, impossibilitando a sustentação da vida” (HEILBRON; MORO; XAVIER; 2007; p. 28). Mas para fins de proteção radiológica, os efeitos biológicos da radiação são classificados em:
Efeitos Estocásticos: são aqueles cuja probabilidade de ocorrência é função da dose, não existindo limiar, como é o caso do câncer. Assim, para qualquer indivíduo irradiado há uma chance de que certos efeitos atribuíveis à radiação se manifestem, mas só depois de um período de tempo longo (dezenas de anos) a partir do momento que ocorreu o evento de irradiação.
Efeitos Determinísticos: são aqueles que surgem num curto espaço de tempo (dias, horas, minutos) a partir de um valor de dose limiar e sua gravidade é função do aumento dessa dose. Estes efeitos incluem 35 inflamação e ulceração da pele, náusea, vômito, anorexia, diarréia, queda de cabelos, anemia, hemorragia, infecções, etc. Esses efeitos são atribuídos, principalmente, à morte celular ou perda de capacidade de reposição de células de vida biológica relativamente curta, ou seja, aquelas que devem se manter em permanente estado de reprodução como as da medula óssea, as das camadas mais internas dos tecidos de recobrimento (pele, revestimento do sistema gastrointestinal, recobrimento de glândulas) e aquelas da linhagem germinativa (HEILBRON; MORO; XAVIER, 2007, p. 34).
Estes efeitos ocorrem devido a mutação ou quebra das moléculas de DNA e, segundo Heilbron, Moro e Xavier (2007), convém observar que ele é o responsável pela codificação da estrutura molecular de todas as enzimas das células, passando a ser a molécula chave no processo de estabelecimento de danos biológicos.
Devido a seus perigos, diversas medidas foram tomadas para que houvesse uma regulamentação na quantidade de radiação recebida pelo público geral ou trabalhadores destas áreas, assim como normas de proteção para manuseio, armazenamento e controle de exposição.
Atualmente, a tendência mundial tem sido a de adotar limites de dose ainda mais restritivos, limites esses recomendados pela ICRP (International Commission on Radiological Protection) em 1990 e que, no Brasil, já foram adotados pelo Ministério as Saúde para radiodiagnóstico médico e odontológico, por meio da Portaria 453, de 01/6/98. Assim é que, para trabalhadores nessas áreas, a dose média anual não deve exceder 20 mSv (2 rem) em qualquer período de 5 anos consecutivos, não podendo exceder 50 mSv em nenhum ano (HEILBRON; MORO; XAVIER, 2007, p.40).
Com o aumento na utilização da radiação ionizante, cresceu também a necessidade e demanda de equipamentos e EPIs adequados para a manipulação desses itens radioativos a fim de atender às normas impostas pelos órgãos reguladores. De acordo com Almeida (2022), os meios de proteção são determinados através de três pilares: distância, tempo de exposição e blindagem. À medida que o indivíduo se afasta de fontes emissoras de radiação, a intensidade da energia transportada pela mesma decai com o quadrado da distância. A dose de radiação recebida é diretamente proporcional ao tempo de exposição à fonte emissora. A imposição de barreiras entre indivíduo e fonte emissora de radiação faz com que o feixe emitido chegue atenuado (menos intenso) até ele.
Com o foco nessas três vertentes de proteção, algumas companhias desenvolveram tecnologias para manipulação desses materiais de maneira remota, um exemplo é a Kuka que teve como premissa a necessidade do mercado em desativação de usinas nucleares.
“Em toda a Europa há um incentivo para se abandonar a energia nuclear. Com isso, nos últimos anos, o número de desativações de usinas nucleares foi maior do que a construção de novas usinas no mundo todo. A desativação desses equipamentos será a principal tarefa nas próximas décadas. Das centenas de usinas nucleares em operação no mundo, mais da metade já atingiu o fim de sua vida útil operacional ou se encontra próxima do fim.” (KUKA AG; p. 1)
Segundo a Kuka (2020; p. 1), “a recuperação ambiental também é necessária em alguns lugares usados para atividades semelhantes, como pesquisa nuclear, enriquecimento de urânio, tratamento e preparação de materiais naturalmente radioativos”.
Como solução, a companhia desenvolveu um joystick compatível com as ferramentas de tesoura hidráulica, garra e mordentes de uso geral, ferramentas de perfuração, colocação/retirada de parafusos, bombeamento, pulverização ou outras ferramentas para a reciclagem geral de resíduos e manipulação. Com ele, o operador pode controlar um robô manualmente numa distância de até 100 metros e em até seis graus de liberdade.
Figura 1 – Joystick desenvolvido pela Kuka para manipulação de elementos radioativos

Importante ressaltar que apesar da inovação tecnológica, o joystick possui uma mobilidade limitada dado seu baixo número de graus de liberdade, o que impossibilita uma movimentação mais livre, adaptável e dinâmica. Um exemplo de mecanismo capaz de realizar esse tipo movimento são as mãos humanas, que são responsáveis por atividades completamente antagônicas, que variam de movimentos delicados e precisos, como escrever ou tocar um instrumento, até tarefas que exijam força e potência, tornando-a um dos elementos mais importantes do corpo humano (Kaempf; 2014).
Conforme Costa (2017; p. 20), “a coordenação e funcionalidade da mão, assim como sua capacidade de mudar de forma, adaptando-se a diferentes tipos de objetos, deve-se ao fato da existência de seus 23 graus de liberdade, sendo cinco para o polegar, quatro para cada um dos outros dedos e, mais dois para o punho”. Em comparação, o número de juntas de um robô determina seus graus de liberdade e a maioria dos robôs possui de 3 a 6 eixos (Freire; 1999; p. 3), portanto é entendível que um dos maiores desafios para a construção de um instrumento funcional e adaptável para esta função é a quantidade de graus de liberdade alcançados por ela.
Um modelo de dispositivo que tem como objetivo reproduzir a gesticulação deste membro são as próteses de mãos humanas, que já vêm sendo objeto de estudo há milhares de anos. A primeira prótese data 200 anos antes de Cristo, onde o general romano Marcus Sergius, ao perder sua mão em uma batalha, recebeu o componente artificial feito de ferro para poder segurar seu escudo enquanto montava a cavalo durante as batalhas da Segunda Guerra Púnica (218 a 201 aC) (CÉREBRO & SAÚDE; 2021). Apesar de uma boa funcionalidade para encargo estabelecido, a mesma consistia em um membro fixo, sem possibilidade de movimento e reprodução das atividades realizadas pelo membro em si. Atualmente, as próteses podem ser divididas em duas categorias: Passivas, com foco no caráter estético ou prático, imitando o formato da mão ou de alguma ferramenta útil como utilizado na Segunda Guerra Púnica; e Ativas, que objetivam a substituição das funções do membro perdido por meio de alguma ativação, seja externa ao usuário como uma fonte de energia ou interna baseada na contração de músculos do corpo (CRUZ, 2017).
Com o progresso no ramo da engenharia biomédica, desenvolveu-se estudos de movimento da mão a fim de compreender e classificar as ações realizadas pelo membro e assim aprimorar as próteses para que tenham mais funções úteis para o dia a dia. Classificou-se estes movimentos em apreensões em dois grupos: a preensão de força (palmares), caracterizadas como um movimento de maior estabilidade por utilizar a palma da mão como apoio, e a preensão de precisão (digitais), entendida como uma ação mais delicada que utiliza apenas dois dedos para realizar o movimento, intitulado de pinça (Costa; 2017).
Figura 2 – Movimentos finos da mão, focado nas preensões da mão

Para se construir um dispositivo análogo à mão humana, sendo ele uma espécie de ferramenta ou mesmo uma prótese, é necessário compreender quais são os movimentos e os aspectos fisiológicos que o dispositivo pretende reproduzir ou alcançar (CRUZ, 2018). Em vista disso também subentende-se que é necessário compreender onde estes movimentos ocorrem, e quais suas dinâmicas.
Figura 3 – Diagrama representando os ponto articulares da mão e do antebraço onde os movimentos ocorrem
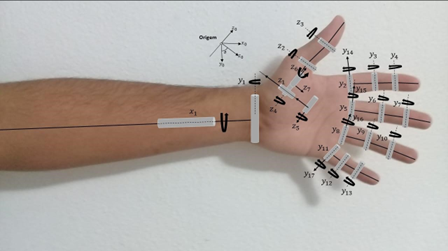
Para compreender os movimentos realizados pela mão, primeiramente é necessário entender sobre as articulações, caracterizadas como pontos de contato entre os ossos ou cartilagens que permitem alguma flexibilidade àquela parte do corpo. As articulações são divididas em três principais grupos, sendo eles as fibrosas, cartilagíneas e sinoviais, segregadas de acordo com o grau de movimento que cada uma permite. Estas últimas apresentam um pequeno espaço entre os ossos que compõem a articulação, chamados cavidade particular, que permite a movimentação livre daquela juntura. Dentro deste grupo, há quatro classificações de movimentos, sendo os mais importantes para o presente trabalho: os angulares, caracterizados pela redução ou aumento do grau entre os ossos envolvidos na articulação, por exemplo a aproximação da palma da mão com o antebraço; e os movimentos especiais, que agrupam os movimentos que a mão humana realiza (TORTORA, 2000).
Segundamente, compreender a anatomia da mão e pulso humano também são etapas imprescindíveis da pesquisa, uma vez que somente com o entendimento dos mecanismos envolvidos é que se pode copiar as ações. A mão é formada por principalmente 27 ossos, e a ligação desses ossos com a ulna (28° osso) é o que permite que o pulso realize os principais movimentos cotidianos (OATIS, 2014). Em específico: o pulso é composto por 8 ossos carpais de diferentes tamanhos e formatos que permitem a cinética tanto dele quanto da mão; o dorso da mão é composto pelos ossos metacarpais, caracterizados por serem longos e com bases distintas entre si, que refletem os movimentos que cada dedo pode realizar; polegar contém uma base em formato de sela que permite a realização do movimento oposição; e por fim, os demais dedos são compostos por 3 falanges cada, exceto o dedão formado por apenas 2 que, similar aos metacarpais, apresentam bases distintas de acordo com a cinética de cada dedo (OATIS, 2014).
De acordo com Kapanji (2000), a mão humana somente alcança tal perfeição e quantidade de movimentos devido a peculiaridade do polegar, que consegue se opor contra todos os demais dedos, ação intitulada de oposição (TORTORA, 2000) .Entretanto, o pulso também tem grande participação na versatilidade da mão, permitindo que o membro chegue a diferentes alturas e partes do corpo, principalmente pela sua capacidade de realizar a supinação e pronação. Esses movimentos opostos se caracterizam como sendo respectivamente a palma da mão orientada para cima com o polegar para fora e a palma da mão para baixo com o polegar voltado para dentro, que além dos movimentos citados, ainda permite que o pulso gire, tornando possível a utilização de uma chave de fenda, por exemplo (KAPANJI, 2000). A pronação e a supinação são exemplos de movimentos classificados como movimentos especiais, que ocorrem somente em articulações especiais, como as da mão e pulso (TORTORA, 2000).
O autor Kapanji (2000) ainda descreve outro movimento importantíssimo para o pulso, intitulado flexão e extensão, que permitem que a palma e o dorso da mão, respectivamente, possam se aproximar do braço em um ângulo de 85°, como demonstrado na figura 4.
Figura 4 – Fisiologia articular do pulso realizando os movimentos de flexão e extensão
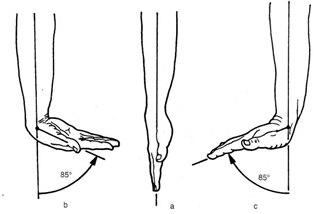
Fonte: Kapandji (2000)
Diante da complexidade de graus de liberdade e movimentos que o membro superior, em específico os referentes a mão e pulso, realiza, é de extrema dificuldade reproduzi-los de forma precisa em uma prótese ativa, principalmente os movimentos mais finos, como as pinças e preensões centrais. Tais conclusões foram identificado na revisão integrativa de
SYU Morimoto et. al de 2021, em que vários estudos do século XXI foram analisados, identificando seus objetivos, resultados e limitações. Outros pontos de dificuldade encontrados foram a força das próteses, que impediam o levantamento de objetos mais pesados, e limitações nas baterias e estruturas das próteses em si, que apresentavam uma durabilidade abaixo do esperado.
Em conjunto com a capacidade de movimento da prótese, também é necessário que ela tenha o potencial de captação destes comandos para poder realizá-los. Um exemplo disso são os instrumentos desenvolvidos para serem utilizados na Realidade Virtual (RV), que objetivam copiar os movimentos da mão do usuário e transmiti-lo ao Metaverso. Segundo a Meta, empresa pioneira no ramo de RV, eles possuem o equipamento chamado Meta Quest 2 Right Controller que são acoplados às mãos e pulsos e permitem que o usuário jogue de maneira interativa com o ambiente virtual através dos controladores que podem rastrear sua localização no espaço 3D, identificar a inclinação e rotação de cada controlador. Apesar das inúmeras possibilidades que este console traz, ainda há uma limitação na imersividade do usuário, dado que ele não consegue captar movimentos mais precisos e nem individuais dos dedos. Com este propósito, a empresa Plexus surgiu no mercado com a iniciativa de aprofundar estas relações. Segundo a companhia (2017; p1), desenvolveu-se uma espécie de luva adaptada para controles de VR, como o Meta Quest 2 Right Controller, mas que aumenta a precisão de captação de movimento, possuindo a medição de 21 graus de liberdade, além de trazer o feedback tátil, mecanismo que permite sentir força, vibração e movimento dos elementos que você interage virtualmente, trazendo as texturas cibernéticas para a realidade.
Figura 5 – Luva Plexus desenvolvida para maior precisão de captação de movimento e feedback tátil

Fonte: Plexus (2017)
A alta tecnologia age em paralelo com um alto custo. Para o caso da luva Plexos, a companhia cobra 249 dólares (cerca de 1.295,27 reais na cotação atual do dia 20/09) por par de luvas (2017; p.1), tornando-se inacessível ao público geral. O criador de conteúdo e inventor Lucar VRTech partiu dessa premissa para desenvolver a luva Lucid Glove de interação de Realidade Virtual por apenas 60 dólares (cerca de 311,52 reais na cotação atual do dia 20/09) por par, cerca de 416% mais barato do que o ofertado pelo mercado. Como solução, Lucas utiliza potenciômetros como base do aparelho.
Figura 6 – Lucid Glove utilizando potenciômetros como principal técnica para o funcionamento da luva
Fonte: Lucas VRTech (2022)
O mecanismo consiste em cabos presos das pontas dos dedos do usuário até o dorso da mão, onde estão atados a uma mola espiral e conectada a um potenciômetro. Conforme o usuário muda o ângulo da posição dos dedos, o potenciômetro pode captar através da variação de movimento no seu eixo, puxado pelos cabos, a quantidade de ação realizada pelo usuário. Essa informação é enviada para um arduíno que as compila e transmite para o ambiente virtual.
3 Materiais e Métodos (ou Metodologia se corresponde)
A iniciativa deste projeto teve princípio de aprimoramento das ideias já consideradas no grupo de pesquisa “Applied Neuromechanics And Ergonomics Research Group”, que objetivaram o desenvolvimento de uma prótese de membro superior de baixo custo. Partindo desta premissa, utilizou-se a base de modelagem para a adaptação deste projeto, visando alcançar os objetivos propostos através de pesquisas tanto descritivas quanto exploratórias.
Para o desenvolvimento do conceito dos mecanismos iniciais de captação de movimento do usuário e de movimentação da mão robótica, utilizou-se a abordagem teórica através de livros, artigos e trabalhos acadêmicos. Assim, foi adquirido o conhecimento disponível no mercado e no ramo universitário sobre coleta e rastreamento da posição de mãos e pulsos através de dispositivos controladores, que foram posteriormente adaptadas para a luva que será utilizada pelo operador. Ao obter as melhores compreensões da engenhosidade presente nos movimentos complexos de uma mão humana e em sistemas de alavancas que fossem capazes de reproduzi-los de maneira mais assertiva dentro das limitações da engenharia, iniciou-se então o desenvolvimento das falanges e o pulso da mão robótica.
Com o decorrer da elaboração experimental dos dispositivos, foi necessário adaptações realizadas em laboratório e aprimoramento das ideias inicialmente propostas para que o projeto funcionasse de maneira adequada, de forma a criar um protótipo único e personalizado para atender os resultados esperados.
Para alcançar nossos objetivos, partimos de uma metodologia baseada em três principais objetos, sendo dois que precisaríamos desenvolver desde o zero (mão e luva) e um que seria responsável pela comunicação entre os dois protótipos.

Para a confeção das duas partes do projeto (luva e mão), houve a divisão em etapas menores da metodologia, sendo elas:
Luva:
– Estudos referentes a diferentes técnicas e mecanismos para captação de movimento;
– Desenvolvimento da concepção do mecanismo de captação de movimento com base nas pesquisas realizadas;
– Impressão em 3D FDM (Fusion Deposition Modeling) dos componentes necessários;
– Montagem dos componentes para formar a interface de captação de movimento;
– Realizar o acoplamento dos componentes elétricos na luva;
– Pesquisar e desenvolver o código de programação necessário para o funcionamento da luva;
– Realização de testes com o protótipo da mão.
Mão:
– Estudos referente aos movimentos que são característicos de uma mão humana;
– Estudos acerca de diferentes tipos de mecanismos de moção;
– Desenvolvimento do tipo de mecanismo de moção;
– Realização da modelagem em ambiente virtual SolidWorks 3D;
– Realizar a Impressão 3D SLA (estereolitografia) dos componentes do protótipo;
– Realizar os ajustes para montagem das peças no protótipo finalizado;
– Acoplar os componentes elétricos na estrutura;
– Concepção de testes de movimentos.
3.1 Luva
Para o desenvolvimento e criação da luva de captação de movimentos, foi preciso concluir a melhor solução para recolher a informação do posicionamento dos dedos do usuário a fim de espelhar para a mão robótica. A princípio, a maneira mais eficaz seria através da utilização de sensores nas pontas dos dedos que transmitiriam as informações para uma placa de arduíno, onde seria compilado e transferido para a mão robótica. Porém, o valor destes materiais estava muito acima do orçamento inicial, tornando-se necessário um estudo mais aprofundado com recursos mais acessíveis.
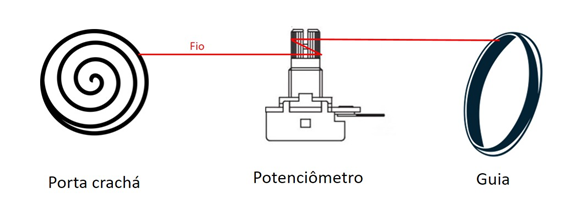
O método encontrado foi a utilização de potenciômetros e molas para substituir os sensores, dado que eram os elementos mais caros. O funcionamento baseia-se em ter um fio enrolado em uma mola espiral, acoplado a um potenciômetro e preso nas pontas dos dedos da luva, para que, quando o usuário fizesse algum movimento, a quantidade de fio utilizada indicaria quantos graus de movimento para que a mão robótica repassasse essa informação para cada dedo envolvido no movimento. Com este mecanismo, pudemos prosseguir com adaptação dos demais elementos que compõem a luva para melhor fixação dos mesmos.
Figura 7 – Construção da Luva com o acoplamento das molas

Fonte: Elaboração Própria dos autores
3.1.1 Mecanismo de retração dos potenciômetros
Com a ideia já formada da necessidade de criação de um mecanismo que se estendesse e realizasse automaticamente a função de retração, tivemos algumas opções de início, como molas lineares de canetas e pregadores. Após uma pesquisa e discussão interna do grupo, nós fixamos a possibilidade de utilizar porta crachás como o principal meio de realizar o movimento desejado.
Com essa decisão tomada, o próximo passo seria projetar como os potenciômetros seriam acionados em conjunto com o funcionamento do porta crachá. A idéia inicial foi acoplar o potenciômetro e o porta crachá em uma única unidade com o auxílio de peças impressas em 3d, porém tivemos problemas com a impressão e decidimos seguir com a utilização de materiais reciclados e separar o potenciômetro do porta crachá.
Figura 8 – Mecanismo com molas lineares dos porta crachá acoplado aos potenciômetros

Fonte: Elaboração Própria dos autores
A principal ideia por trás desse projeto é simplificar a operação de cada componente, sendo assim facilmente replicado e sem a necessidade de modificar internamente nenhuma peça. Os porta crachás ficam estabilizados em uma placa de plástico que oferece amplo espaço para a fixação dos mesmos. Os potenciômetros foram acoplados em uma outra placa de plástico, em um nível inferior para auxiliar no alinhamento do fio do porta crachá com o eixo do potenciômetro.
3.1.2 Fixação
Para fixar cada componente da luva no suporte principal, foram utilizados diferentes métodos de fixação. Para os porta crachás, foi utilizado cola quente e supercola, ambos métodos de fixação definitiva impossibilitando a desmontagem. Os potenciômetros foram acoplados utilizando o padrão já existente de arruela e porca, o que facilita o reparo ou desmontagem do protótipo. Os guias dos anéis e tampões dos dedos foram fixados utilizando cola quente, que facilita a remoção dos anéis dos dedos e dá mais resistência aos guias. O suporte principal é acoplado na munhequeira ortopédica com super cola o que impossibilita a desmontagem e alguns possíveis ajustes na luva.
Figuras 9.A e 9.B – Acoplamento das molas lineares com os potenciômetros; Acoplamento do mecanismo com os suportes para os dedos

Fonte: Elaboração Própria dos autores
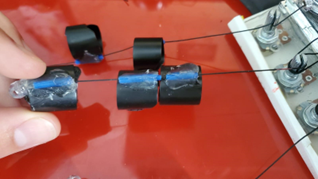
3.1.3 Funcionamento
A solução que escolhemos foi a de separar os potenciómetros dos porta crachás para facilitar a montagem e replicação do equipamento. Então, o conceito utilizado foi usar o porta crachá como um equipamento tracionador, para sempre retornar o potenciômetro para seu estado inicial. O potenciômetro é posicionado logo em seguida, funcionando como polia para o fio do crachá. Assim, ainda temos o efeito tracionador do porta crachá junto com o registro do deslocamento do dedo com o potenciômetro, resolvendo,então, a proposta de conseguir registrar o deslocamentos dos dedos.
Figura 10 – Conceito de movimento do potenciômetro para captação dos movimentos
Fonte: Elaboração Própria dos autores
3.1.4 Confecção das peças
Inicialmente, a ideia foi a de seguir os princípios da mão robótica e imprimir em 3D todos os componentes, visando um acoplamento e um acabamento mais aprimorado, além de integrar o sistema de retração do fio com potenciômetro em um sistema mais compacto. Para o projeto das peças nos baseamos no projeto de peça da luva Lucid Glove, onde os arquivos estavam disponíveis para download.
Figura 11 – Modelagem dos componentes para acoplamento
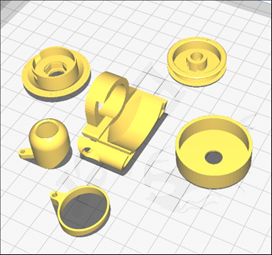
Fonte: Lucid Glove
Realizamos alguns ajustes de dimensionamento nas peças para acomodar a diferença de cada dedo e colocamos todas elas no plano de impressão para agilizar o fatiamento e produção da peça.
Figura 12 – Ajustes nas modelagens dos componentes para acoplamento
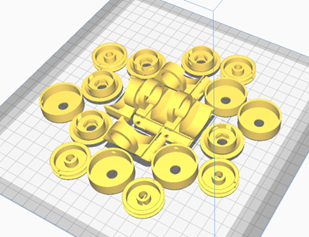
Fonte: Lucid Glove
A escolha de imprimir em 3d todos os componentes de uma única vez se mostrou uma tarefa mais desafiadora do que havia sido antecipado. Houve como resultado uma série de erros e falhas de impressão, sendo necessário um mês inteiro dedicado a revisar o projeto diversas vezes. Os resultados, entretanto, sempre foram insatisfatórios, então, foi tomada a decisão de abandonar essa proposta a fim de concluir o projeto dentro do prazo estabelecido.
Partindo para uma nova frente de ação, foi feita a escolha por utilizar materiais reciclados e de fácil acesso.
Para fazer a parte dos dedos, utilizamos organizadores de fios como anéis para cada falange do dedo, proporcionando mais estabilidade no momento de uso da luva. Os guias são feitos com hastes de cotonetes cortadas para o tamanho certo de cada anel e fixada com cola quente e alguns pontos de supercola
Para fazer o suporte principal, foi utilizado duas chapas de acrílico de aproximadamente 5 cm X 15 cm coladas com cola quente com um espaçador de plástico entre as placas para criar um alinhamento melhor do porta crachá com o potenciômetro. Como acabamento da parte inferior do suporte, utilizamos papel cartão grosso colado com super cola ,o que forneceu melhor acabamento e proteção das ligações eletrônicas.
Para a luva em si, em um primeiro momento optamos por utilizar uma luva de construção, porém colocar e remover a luva se tornou uma dificuldade muito grande, então a parte da luva foi descartada e resolvemos utilizar um suporte ortopédico para o pulso, onde conseguimos acoplar o suporte principal e também obtivemos um espaço maior para montar o sensor de inclinação do punho.
Figura 13.A e 13.B
Todos os componentes da luva de captação de movimento; Mecanismo totalmente montado
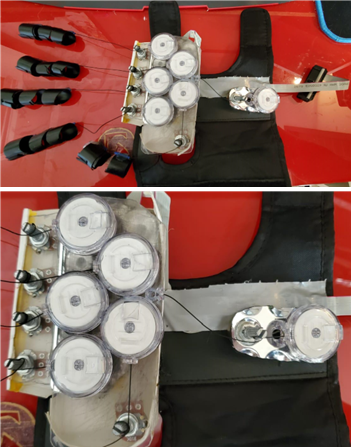
Fonte: Elaboração Própria dos autores
Para todo o processo de fiação da luva, foi utilizado um cabo chato de 50 pinos de computador antigo, o que possibilitou um acabamento mais limpo e preciso..
Figura 14 – Fixação dos componentes eletrônicos da luva

Fonte: Elaboração Própria dos autores
3.1.5 Problemas e Soluções
No início do projeto, a solução escolhida para a confecção da luva foi utilizar uma impressora 3D, que nos ajudaria a criar um sistema mais compacto que seria mais simples de colocar e operar. Tivemos um grande sucesso na parte de prototipagem no ambiente virtual, projetando e ajustando as peças.
Decidimos realizar a impressão em uma impressora 3D Max com um filamento de PLA preto com 25% de Infil. A estimativa de conclusão era de 16 horas e começamos a imprimir.
Figura 15 – Primeira impressão dos componentes de para acoplamento

Fonte: Elaboração Própria dos autores
No meio do processo tivemos falha na impressão, então passamos a realizar uma análise dos restos para entender os possíveis motivos pelo qual a falha ocorreu. Olhando o projeto e os restos da impressão, pudemos identificar que algumas das paredes estavam muito finas, especialmente o carretel, ocasionando em um colapso da estrutura superior por falta de uma base mais sólida. Esse deslocamento deve ter entrado em contato com o bico extrusor e quebrado as peças.
Foi feito um ajuste no projeto 3D do carretel e decidimos por realizar uma impressão teste, com o intuito de testar alguns outros parâmetros de impressão e algumas configurações da impressora. Após 5 testes ainda obtivemos erros com as impressões .
Figura 16 – Impressão final dos componentes de acoplamento

Fonte: Elaboração Própria dos autores
Após decidirmos abandonar o processo com a impressão 3D, nos voltamos para um novo desafio, onde teríamos que criar um novo sistema para registrar os movimentos dos dedos utilizando os materiais já adquiridos pelo grupo, o porta crachá e o potenciômetro.
A proposta inicial seria então não desmontar nenhum componente e criar uma simples instalação que poderia ser facilmente reproduzida. Partindo desse conceito foram feitos alguns esboços de qual seria a melhor disposição dos componentes, facilitando assim posteriormente a construção do protótipo.
3.1.6 Materiais
Material Quantidade Valor (R$) Porta crachá com mola linear 6 Un. 18,00 Potenciômetro 5 Un. 17,50 Filamento SLA 1 Kg 65,00 Organizador de fio 14 segmentos 5,00 cotonete 6 1,00 Chapa de acrílico (15x5cm) 2 10,00 Papel cartão 200 cm² 1,00 Cola quente 1 tubo 2,00 munhequeira ortopédica 1 34,90 cabo chato 50 pin 1 10,00 fita silver tape 1 12,90 super cola 1 11,90
3.2 Mão
3.2.1 Mecanismo das Falanges
O primeiro passo da criação da mão robótica foi a concepção do conceito e posteriormente o desenvolvimento de um mecanismo de movimentação dos dedos. Diversos projetos desenvolvidos por outras instituições usavam cabos extensores acoplados das pontas dos dedos a um motor localizado no dorso da mão para reproduzir a dinâmica de movimentos de preensão palmar, mas com o objetivo de simplificar e unificar o dispositivo, consideramos um método de alavancas (imagem 17A e 17B) para criar um dispositivo que pudesse gesticular apenas com os componentes fixos. Desse modo, o controle da posição angular das falanges apresentaria uma maior precisão quando acionados através da interface humano-máquina. Todo esse estudo e modelagem foi realizado com o auxílio do software de modelagem Solidworks.
Este mecanismo pode ser reproduzido para as demais falanges, exceto para o polegar que possui uma dinâmica de acionamento diferente, em que foi necessário um estudo à parte para reprodução do movimento que possui.
Figura 17.A e 17.B
Representação gráfica do conceito inicial do mecanismo de movimento de flexão e extensão das falanges
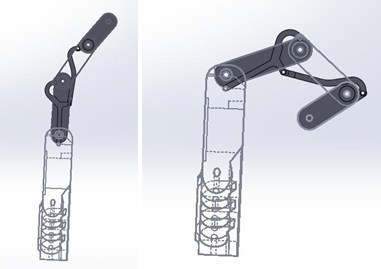
Fonte: Elaboração Própria dos autores.
O principal motivo de criar-se um mecanismo típico que pudesse ser reproduzido para as demais falanges, com exceção do polegar, se sustenta na facilidade da confecção, de modo que fosse possível enviar um único arquivo replicado nas quantidades estipuladas em projeto para a impressora SLA, além de também simplificar a manutenção de qualquer avaria ou pane que pudesse ocorrer em função da realização dos testes, ou até mesmo de problemas relacionados ao projeto em que fosse necessário a realização de modificações nas peças.
Com a conclusão do estudo e desenvolvimento do mecanismo das falanges (como pode ser observado nas Figuras 18A e 18B abaixo), passou-se para a modelagem total da mão robótica, desenvolvendo a palma da mão com os alojamentos para acomodação dos servo motores MG995, SG90s e SG90, responsáveis pela atuação de cada um dos dedos (especificações técnicas dos servo motores na tabela 1) e também com todos os pontos de fixação dos elementos que compõem o protótipo.
Tabela 1 – Especificações técnicas dos servo motores empregados.
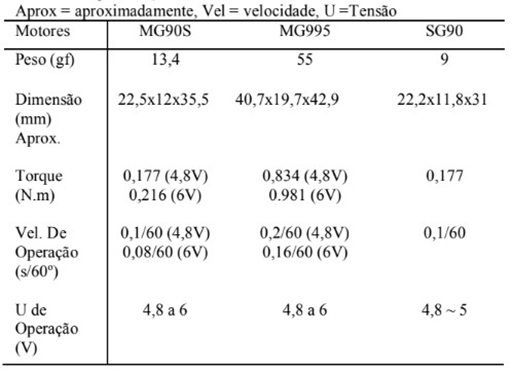
Fonte: RODRIGUES, Y. S, ISHIKAWA, B. K, MARIA, B. C. G, NORIEGA, 2020, p. 2
Figura 18.A e 18.B
Representação gráfica em detalhes do conceito final do mecanismo de movimento
de flexão e extensão das falanges
Fonte: Elaboração Própria dos autores
Realizamos testes dos movimentos de pinça e preensão para que pudéssemos avaliar e provar virtualmente a funcionalidade do mecanismo. Obtendo resultados positivos, esta etapa foi finalizada, saindo então do foco do mecanismo típico das falanges e entrando no âmbito geral para a etapa do projeto da mão como um todo.
Figura 19.A e 19.B
Representação gráfica dos movimentos de Pinça realizado em ambiente virtual;
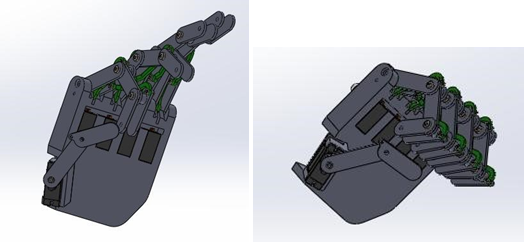
Fonte: Elaboração Própria dos autores
3.2.2 Palma
Um dos desafios enfrentados no projeto da palma foi como definir a distribuição dos motores em sua área útil, de modo que estes pudessem ser ligados aos pontos de fixação do mecanismo das falanges de forma padronizada e que pudessem realizar o movimento angular sem interferir no movimento do motor ao lado. Essa interação indesejada impediria a movimentação independente de cada falange, impedindo que os dedos realizassem os movimentos de flexão. Além disso, foi necessário definir o ponto de fixação do mecanismo que realizaria o movimento de supinação, pronação, flexão e extensão considerando também a organização dos fios dos servo motores. Em função disso, foram criados canais para a passagem destes fios para a parte traseira da palma para que eles não interferissem nos testes que seriam realizados, ao mesmo modo que este arranjo permitiria uma forma mais prática de montagem, desmontagem e manuseio da parte elétrica dos motores quando estes fossem conectados à interface de testes.
3.2.3 Mecanismo do Polegar
Para realizar os movimentos do polegar, foi necessário considerar de que modo o mecanismo idealizado inicialmente poderia alcançar os graus de liberdade dentro das nossas limitações, isso é, levar em conta o espaço ocupado pelos servomotores bem como de que modo o controle dos movimentos poderia ser feito dentro da metodologia que foi definida. O polegar humano possui 5 graus de liberdade (GDL) (NAGEM e colab., 2007), destes 5, o mecanismo do protótipo alcança 2 GDL, não realizando a rotação do polegar, sendo que 1 servo motor SG90 atua a falange distal e medial simultaneamente e um servo motor SG90s realiza os movimentos de adução e abdução. Desta forma, ao combinar os movimentos angulares dos motores, nós podemos atingir movimentos próximos do polegar humano.
A construção do mecanismo conta com uma barra arqueada que tem como objetivo realizar o movimento e transmitir a força do motor sem deflexionar com os esforços aplicados, tendo em vista de que foi observada a ocorrência de deflexão em peças retas com menor espessura após a construção do protótipo físico. Essa deformação era em função da baixa dureza de 70 na escala Shore A da resina semi flexível utilizada para a impressão, e para garantir uma maior eficiência à barra, foi adicionada uma nervura interna para aumentar sua rigidez. Esse componente se caracterizou como uma articulação multiaxial, que foi implementada em cada uma das pontas da barra arqueada, ligando assim o servo motor à estrutura do polegar. Dessa forma, o movimento captado no plano de giro do servo motor foi transmitido para o plano de giro da estrutura já que um plano é perpendicular ao outro. Abaixo na figura 20 podemos observar o arranjo final do mecanismo.
Figura 20 – Representação gráfica do mecanismo do polegar.
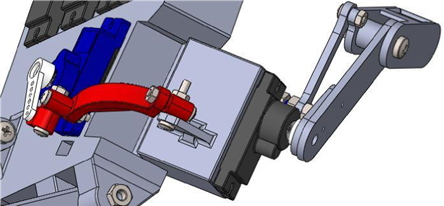
Fonte: Elaboração Própria dos autores
3.3 Confecção das Peças
Para a confecção das peças projetadas nós optamos pelo método de impressão 3D SLA (impressão por resina) devido a sua excelente precisão dimensional, nos detalhes e na rapidez de produção, uma vez que é possível imprimir várias peças ao mesmo tempo. A tecnologia empregada nessa técnica se caracteriza como a cura das camadas de cada peça por meio de uma imagem digital no display ao fundo do recipiente, onde a resina é depositada. Desta forma, a produção das peças é mais versátil do que a produção por métodos convencionais como usinagem, sinterização ou fundição. Além disso, essa técnica se caracteriza como um tipo de manufatura aditiva, ou seja, a quantidade de refugos provenientes do processo de produção é mínima quando comparada ao processo de usinagem, levando a presença de refugos apenas quando há necessidade de gerar suportes para auxiliar na impressão quando o apoio da própria estrutura não é o suficiente para que a impressão seja feita de forma efetiva.
O material utilizado para a impressão foi a resina Tough da marca 3D Cure. Por ser semi flexível e apresentar uma dureza na faixa de 70 a 80 shore A, esta resina nos proporciona alta resistência a impactos e quedas. Abaixo podemos ver o resultado da impressão de algumas peças na figura 21.
Figura 21 – Impressão das peças em resina Tough

Fonte: Elaboração Própria dos autores
Na etapa de montagem do protótipo, utilizou-se elementos fixadores como parafusos e porcas M3 e M2 nas normas ISO 4032 e ISO 7045 para as juntas dos dedos e uma barra roscada para confecção dos eixos, além do encaixe dos motores e componentes elétricos.
3.4 Interface de Testes
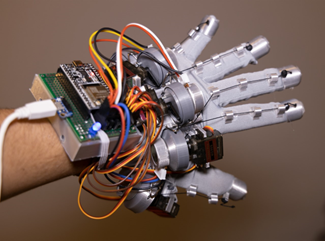
Uma interface de testes foi montada com o objetivo de desenvolver um código para simular com exatidão o controle da luva HMI, bem como para implementar na utilização da mesma. Esse código permitiria a realização e validação dos mecanismos e o teste dos motores, além de também analisar os movimentos realizados por cada uma das falanges a fim de observar o alcance de cada movimento, identificando possíveis falhas e auxiliando na concepção de soluções para corrigi-las. Para a criação da interface de testes, foi utilizada uma placa de prototipagem onde os potenciômetros, fios de energia e de transmissão de dados analógicos pudessem ser conectados, manuseados e organizados de forma fácil e versátil, de modo que ajustes fossem possíveis durante os testes do código criado para o controle.
Figura 22 – Interface de testes conectada ao microcontrolador e aos mecanismos de atuação.
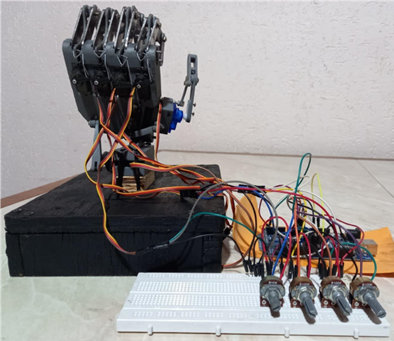
Fonte: Elaboração Própria dos autores
Um Arduino Mega 2560 R3 foi empregado como controlador de todo o sistema eletrônico devido a sua quantidade de entradas e saídas digitais e analógicas que são necessárias para a conexão entre a interface e os motores. O código foi criado na plataforma Arduino IDE e nele cada falange é controlada com um potenciômetro, exceto pelo polegar que um único potenciômetro controla os dois motores que o compõem simulando a sensorização da luva HMI.
3.5 Problemas e Soluções
Após a etapa de montagem das peças, percebeu-se que devido a dureza não suficiente da resina utilizada na impressão das falanges, especificamente as proximais e mediais, as mesmas estavam deflexionando com os esforços de reação das ligações articuladas. Como solução, elas foram substituídas por peças de aço inox 420 que possuem dureza de 48-52 HB. O recurso trouxe resposta positivas para o problema em questão, porém no momento de fabricação destas peças, foram utilizadas brocas de aço carbono que não suportaram a resistência do material e aqueceram, queimando e perdendo a têmpera. Assim, se viu necessário a compra de brocas HSS (High Speed Steel ou coloquialmente conhecidas como aço rápido), já que estas suportam temperaturas maiores do que as de aço carbono bem como possuem uma dureza maior com 774,69 HV (LINNIKER e colab.,2017).
Outra interferência encontrada foi que, com o processo de cura com luz ultravioleta da palma da mão, a resina acabou contraindo 1,03% mais do que o esperado e impedindo um bom encaixe das falanges e de alguns servo motores. Entretanto, foi possível limar as novas peças de inox para reduzir sua espessura a fim de acomodá-las sem interferência. O mesmo processo foi feito com o alojamento dos servo motores que não puderam ser encaixados.
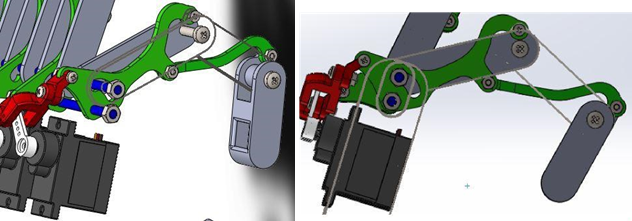
Durante a montagem do mecanismo das falanges para o teste da atuação pelos motores, observou-se que o arranjo de conectores inicialmente idealizados não transmitiam as forças como fora previsto durante a fase de modelagem, onde em ambiente virtual os apresentavam congruência com sua aplicação. Durante os testes, identificou-se pontos de torção no sentido transversal do encaixe da haste das falanges proximais, este que pode ser observado na figura 22 abaixo em cor verde para o melhor entendimento.
Figura 22 – Região de ocorrência de torção entre conectores e haste do mecanismo das falanges
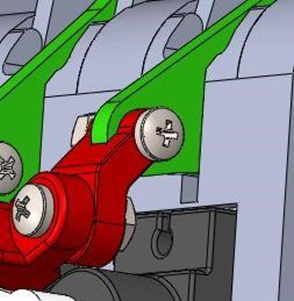
Fonte: Elaboração Própria dos autores
Para solucionar o problema da torção da haste do mecanismo das falanges, utilizou-se peças feitas com arame rígido (figura 23). Considerando que o objetivo do protótipo é analisar os movimentos captados pelos sensores e reproduzi-los, o método de solução tinha como objetivo identificar onde a torção ocorre, bem como verificar seu sentido, de modo que a peça pudesse ser modelada manualmente. Dessa forma, foi possível encontrar qual seria a geometria mais adequada para dissipar os esforços perpendiculares entre os elementos e assim eliminar ao máximo a torção existente atuando o mecanismo de forma adequada permitindo seu funcionamento.
Figura 23 – Peças em arame rígido
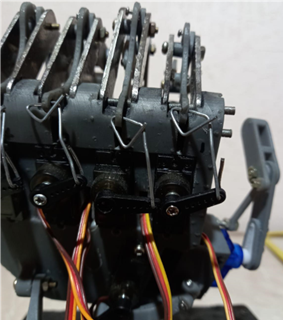
Fonte: Elaboração Própria dos autores
4 Resultados e Discussão
4.1 Teste de Atuação das falanges
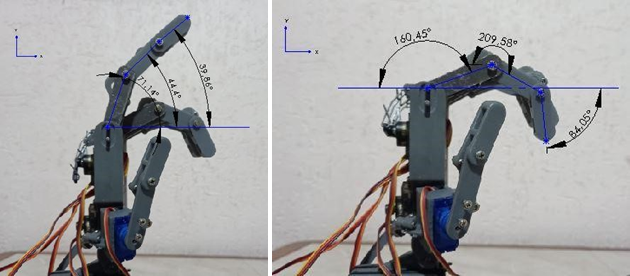
Após solucionar o problema da torção nas hastes foram realizados testes de atuação nas falanges, nesta etapa pôde-se determinar qual é efetivamente o alcance dos movimentos de todos os segmentos da falange como observado na figura 24.a e 24B por exemplo.
Figura 24.A e 24.B – Amplitude do movimento das falanges
Fonte: Elaboração Própria dos autores
Tabela 2 – Apresentação da amplitude efetiva total do movimento de cada segmento das falanges em graus
Falange Posição aberta Posição fechada Amplitude de movimento Proximal 71,14° 19,55° -51,59° Medial 44,40° -29,58º -73,98° Distal 39,86° -84,05° -123,91°
Fonte: Elaboração Própria dos autores
Com a realização dos testes dos protótipos separadamente, obtivemos resultados extremamente positivos. De forma geral, ambos os protótipos cumpriram os objetivos inicialmente propostos para cada, embora muitos pontos tenham sido adaptados e alterados, já que a montagem inicial não se provou eficiente no âmbito real. É interessante ressaltar também que para este trabalho foi desenvolvido um protótipo, que não foi testado na real aplicação na qual seu uso foi idealizado. Entretanto, mediante os dados obtidos, concluímos que sua utilização seria possível devido a seu êxito em realizar o movimento de pinça e preensão palmar, embora precisássemos conceber mais ensaios para que o protótipo pudesse ser, de fato, implementado em situações de riscos em fábricas. Esta conclusão também é baseada nos dados obtidos durante os testes da mão robótica com o código em arduino, que não só permitiu a movimentação dos dedos de forma prevista, como também proporcionará a ampla difusão do conjunto para o público. Sua eficiência, entretanto, nunca chegará perto dos movimentos completos realizados pela mão humana, sendo necessário uma adaptação das ações realizadas pelo usuário pela máquina, para que o protótipo possa copiar
5 Considerações Finais/Conclusões
Desta forma, pode-se concluir que o objetivo do trabalho foi alcançado, proporcionando dois protótipos funcionais que permitem a realização de mais testes futuros para sua utilização de forma conjunta em aplicações de risco real para o ser humano. Seu desenvolvimento em ambiente virtual e com a utilização da técnica de impressão 3D poderá futuramente proporcionar esse tipo de equipamento de forma rápida e acessível, pela possibilidade de se distribuir estes modelos de forma open source e apresentar um baixo custo de produção.
Como futuro aprimoramento do protótipo, temos a possibilidade de adaptação da tecnologia desenvolvida pela companhia Plexus de captação de movimentos com uma alta precisão e feedback tátil, onde é possível criar a experiência de toque onde o usuário pode sentir a força, vibração e movimentos de objetos do metaverso. Com esse recurso, seria possível ter a experiência de toque ao manipular os elementos radioativos e tóxicos.
6 Referências Bibliográficas
ALMEIDA, Frederico Borges de. Proteção Contra Radiação Ionizante; Brasil Escola. Disponível em: https://brasilescola.uol.com.br/fisica/protecao-contra-radiacao-ionizante.htm. Acesso em: 05 de agosto de 2022.
ANDRÉ FELLIPE CAVALCANTE SILVA. Desenvolvimento e caracterização de uma mão robótica acionada por atuadores de liga com memória de forma. p. 1–125, 2015.
CÉREBRO & SAÚDE. Próteses de mãos: da Roma antiga aos super tecnológicos dias de hoje. Ago. 2021. Disponível em: https://www.cerebroesaude.com.br/proteses-de-maos-da-roma-antiga-aos-super-tecnologi cos-dias-de-hoje/#:~:text=Nessa%20época,%20o%20general%20romano,prótese%20de %20mão%20na%20História. Acesso em: 9 de agosto de 2022.
CRUZ, Gizele Ginklings. CLASSIFICAÇÃO DOS MOVIMENTOS DA MÃO BASEADOS NA AQUISIÇÃO NÃO INVASIVA DE SINAIS MIOELÉTRICOS PROVENIENTES DOS MÚSCULOS DO ANTEBRAÇO ATRAVÉS DE REDES NEURAIS ARTIFICIAIS. 2017. 96.Engenharia Eletrônica – Universidade Fedeal de Santa Catarina, Santa Catarina, 2017.
KAEMPF, Ricarto. A importância das Mãos; Disponível em: https://www.ricardokaempf.com.br/a-importancia-das-maos/ . Acesso em: 30 de agosto de 2022.
KAPANDJI, I. Fisiologia Articular. Esquemas comentados de mecânica humana. V1(Membro Superior). [S.l.]: Manole, São Paulo, 1980.
L. SUNDFELD J. L. C. NOGUEIRA, S V Arêdes L S Júnior L F W Barbosa. Estudo E Desenvolvimento De Uma Prótese De Mão Humana Robótica De Baixo Custo Para
Crianças. X Encontro Latino Americano de Iniciação Científica e VI Encontro Latino Americano de Pós-Graduação – Universidade do Vale do Paraíba, p. pp.323-326, 2006. Disponível em: <http://www.inicepg.univap.br/cd/INIC_2006/inic/inic/07/INIC0000857.ok.pdf>.
LINNIKER, Petteson e SERRA, Carvalho e REIS, Marcellino Yvis. Caracterização de brocas comerciais de aço rápido – hss. 2017.
META. Controllers and Hand Tracking; Disponível em: https://store.facebook.com/pt-br/help/quest/articles/headsets-and-accessories/controllers-a nd-hand-tracking/ . Acesso em: 19 de setembro de 2022.
MORIMOTO, S. Y. U., CABRAL, A. K. P. S., SANGUINETTI, D. C. M., FREITAS, E. S. R., MERINO, G. S. A. D., COSTA, J. Â. P., COELHO, W. K., & AMARAL, D. S. Órteses e próteses de membro superior impressas em 3D: uma revisão integrativa. Cadernos Brasileiros de Terapia Ocupacional, 29, e2078, 2021.
NAGEM, Danilo a P e MOREIRA, Marco a G e PEREIRA, Guilherme a S. Desenvolvimento das Relações Interfalangeanas e metacarpo-falangeanas para os Dedos Durante Movimentos de Pinças Development of the Relations for the Interphalange and metacharpo-phalange During Grasp Movement. Structure, p. 179–185, 2007.
NOGUEIRA; Luiz.Tecmasters. Ex-Facebook, Meta revela protótipo de luva que permite sentir objetos de realidade virtual. Disponível em: https://tecmasters.com.br/meta-prototipo-luva-sentir-objetos/. Acesso em: 15 de setembro de 2022.
OATIS, Carol A. Cinesiologia: A Mecânica e a Patomecânica do Movimento Humano. Editora Manole, 2014. E-book. ISBN 9788520452578. Disponível em: https://integrada.minhabiblioteca.com.br/#/books/9788520452578/. Acesso em: 05 nov. 2022.
PLEXUS. We make high performance VR/AR gloves to feel the digital reality. Disponível em: http://plexus.im/. Acesso em: 15 de setembro de 2022.
POSITIVO. Essa luva é o futuro da realidade virtual. Disponível em: https://www.youtube.com/watch?v=PQei9HlSpXY&ab_channel=POSITIVO. Acesso em: 15 de setembro de 2022.
RODRIGUES, Y. S, ISHIKAWA, B. K, MARIA, B. C. G, NORIEGA, C. Modelagem e Simulação de Um Protótipo de Prótese Ativa do Membro Superior Humano de Baixo Custo. Congresso Brasileiro de Engenharia Biomédica (CBEB) 2020, p. 1–4, 2020.
RUZ, Gizele Ginklings Fróes Da. Classificação dos movimentos da mão baseados na aquisição não invasiva de sinais mioelétricos provenientes dos músculos do antebraço através de redes neurais artificiais. 2018. Disponível em: <https://repositorio.ufsc.br/xmlui/handle/123456789/182540?show=full>.
TECHTUDO. Luva inteligente permite ‘sentir’ a realidade virtual. Disponível em: https://www.techtudo.com.br/noticias/2015/07/luva-inteligente-permite-sentir-realidade-virt ual.ghtml. Acesso em: 15 de setembro de 2022..
TORTORA, Gerard J.; DERRICKSON, Bryan. Corpo Humano. Grupo A, 2017. E-book. ISBN 9788582713648. Disponível em: https://integrada.minhabiblioteca.com.br/#/books/9788582713648/. Acesso em: 06 nov. 2022.
VRTECH, Lucas. LucidGloves: VR Haptic Gloves on a budget. Disponível em: https://hackaday.io/project/178243-lucidgloves-vr-haptic-gloves-on-a-budget. Acesso em: 20 de setembro de 2022.
¹Autor(a)
²Orientador