REGISTRO DOI: 10.69849/revistaft/cl10202411281818
Luis Antônio Vieira Vital1
Daniel Costa Ramos2
Resumo
O advento da robótica moderna permitiu a atuação conjunta e coordenada de múltiplos robôs em tarefas com um objetivo comum. Agentes robóticos modernos são dotados da capacidade de avaliar, aprender e compartilhar conhecimentos com seus pares. Dois requisitos essenciais devem ser atendidos para que essa coexistência seja harmônica e fértil: a capacidade de comunicação e troca de dados entre eles. Diversas tecnologias têm sido utilizadas no gerenciamento dessa relação conjunta em seus diversos cenários. Dentre elas, a comunicação em banda ultralarga (UWB) tem se destacado pelas suas numerosas vantagens sobre as demais, se apresentando como solução robusta para esse propósito. Este artigo propõe uma análise da aplicação dessa tecnologia em ambientes cooperativos de UAVs, ressaltando não apenas a sua viabilidade técnica, mas também os benefícios substanciais na execução das tarefas de localização relativa e transferência de dados de forma simultânea, dispensando a necessidade de tecnologia adicional para tal fim.
Palavras-chave: Ultra Wideband, UWB Indoor Localization, Data Communication, UWB Ranging.
1 INTRODUÇÃO
A robótica cooperativa com sua capacidade de atuação disciplinada e coordenada entre múltiplos agentes robóticos vem redefinindo a forma como concebemos a interação máquina a máquina. À medida que avançamos para cenários com alto nível de complexidade e refinamento, surge a necessidade de tecnologias igualmente avançadas capazes de prover recursos para atender as demandas mais desafiadoras em sistemas com restrição temporal rigorosa. Nesse contexto de aplicações estão os veículos aéreos não tripulados (UAVs), desempenhando importante papel na expansão das capacidades da robótica cooperativa em ambientes dinâmicos e complexos.
Em tais ambientes, o canal de comunicação deve ser capaz de prover alta taxa de transferência de dados entre os agentes que compartilham da mesma estratégia em uma tarefa comum. Além disso, deve garantir uma coordenação precisa de eventos e ações que precisam ocorrer simultaneamente ou em um padrão específico aceitável no tempo durante as tarefas de localização e posicionamento relativo entre os agentes.
A localização é um dos principais desafios na implantação de robôs móveis. As abordagens de localização podem ser divididas entre aquelas que fornecem localização global e as que focam na localização relativa (QUERALTA, 2022).
O primeiro grupo inclui principalmente os sensores baseados em sistema global de navegação por satélite (GNSS). O GNSS tem avançado rapidamente nos últimos anos, com o surgimento de diversos sistemas confiáveis como GPS, Beidou, GLONASS e Galileo. Entretanto, em ambientes complexos como cânions urbanos e regiões de transição entre áreas externas e internas, surgem os problemas de multipercurso e obstrução da linha de visada (LOS) (YAN; YANG; FAN; ZHENG et al., 2024). Além disso, muitos sistemas robóticos são implantados em ambientes internos ou sem linha de visada (NLoS), onde o GNSS é indisponível ou não fornece informações suficientemente precisas.
Nesse contexto emerge a segunda abordagem, aplicada à sistemas de posição em ambientes internos (IPS). Diversas tecnologias de posicionamento e localização relativa têm sido utilizadas, como o infravermelho (CHENG; ZHOU, 2019), o LiDAR (ZHANG; DONG; LUO; LU et al., 2022), o ultrassom (FAMILI; STAVROU; WANG; PARK, 2023), a luz visível (ZHUANG; WANG; SHI; CAO et al., 2019), a navegação inercial (KULIKOV, 2018) e a radiofrequência (SADOWSKI; SPACHOS, 2018). Uma tecnologia emergente que tem se destacado nos últimos anos como solução robusta em ambientes onde o sinal dos sistemas de posicionamento global (GNSS) é falho ou indisponível, é a transmissão em banda ultralarga (UWB) (SHULE; ALMANSA; QUERALTA; ZOU et al., 2020). A implantação de vários transceptores UWB em cada agente robótico permite não apenas a localização relativa entre cada par de robôs, mas também de orientação (SHULE; ALMANSA; QUERALTA; ZOU et al., 2020).
Medições em UWB são capazes de obter alta precisão com erro de até 10 cm e alcance máximo de até 50 m, sem mencionar sua capacidade de comunicação. Os sistemas de localização baseados em UWB têm se apresentado como soluções de alta precisão, alcançando níveis de acurácia da ordem de dezenas de centímetros ou até mesmo centímetros (QUERALTA; ALMANSA; SCHIANO; FLOREANO et al., 2020). UWB é uma tecnologia de comunicação sem fio de curta distância que utiliza pulsos de ondas de rádio de curta duração e largura de banda extremamente ampla, o que permite transmitir grandes volumes de dados a taxas extremamente elevadas. As sequências são codificadas através de chaveamento de fase binária (BPSK) e modulação de posição de burst (BPM) (IEEE Draft Standard for Low-Rate Wireless Networks Amendment: Enhanced High Rate Pulse (HRP) and Low Rate Pulse (LRP) Ultra Wide-Band (UWB) Physical Layers (PHYs) and Associated Ranging Techniques, 2020).
Sistemas IPS baseados em UWB envolvendo UAVs tem atraído muita atenção em aplicações que requerem posicionamento preciso (LI; DUAN; LIANG; JIANG et al., 2021; YANG; YANG; YU; LOELIGER, 2022), evidenciando os notáveis atributos dessa tecnologia, como alta precisão, baixa latência e robustez em ambientes desafiadores. Além disso, estratégias de fusão de sensores integram UWB como visão computacional (KAO; CHANG; TSENG; CHEN et al., 2023; NGUYEN; NGUYEN; CAO; QIU et al., 2019), sistema de navegação inercial (CHEN; XING; LI; WANG et al., 2023; XU; SHMALIY; AHN; SHEN et al., 2021), sistema magnético (BRUNACCI; ANGELIS, 2024) ou outras tecnologias de localização emergentes, constituindo abordagens de grande valor para investigações nesse domínio. (CHUNXU; HENRY; TOBY, 2022; YANG; YANG, 2021) .
Um outro aspecto igualmente importante em sistemas cooperativos e seus diversos cenários multiagentes é a capacidade de comunicação, por onde os robôs possam trocar informações, aprender e compartilhar seu conhecimento com os demais envolvidos, abrindo assim um mundo de novas possibilidades. Para esse propósito, a tecnologia UWB também pode oferecer valiosos recursos uma vez que oferece alta taxa de transferência de dados em função de sua alta largura de banda.
Em (MANZI; FELIZIANI; BEECKMAN; DIJK, 2009), é sustentado que sistemas de comunicação via cabo baseados em USB serão futuramente substituídos por conexões sem fio UWB de curto alcance. Os autores justificam afirmando que UWB pode oferecer taxa de transferência superior à capacidade de uma porta USB 2.0, que entrega 480Mbps, permitindo assim aplicações como streaming de áudio, vídeo e comunicação entre smartphones e computadores pessoais.
Vantagens adicionais de UWB sobre outras tecnologias de comunicação sem fio envolvem alta eficiência energética favorecendo o uso de baterias (ALARIFI; AL-SALMAN; ALSALEH; ALNAFESSAH et al., 2016) e alta tolerância a interferências de multipercurso (DROBCZYK; STROWIK; PHILPOT, 2017; XIANJIA; QINGQING; QUERALTA; HEIKKONEN et al., 2021).
Esse trabalho está organizado da seguinte forma: a seção II aborda a metodologia empregada na pesquisa científica; a seção III discute o uso da tecnologia UWB como um sistema de localização em tempo real (RTLS), destacando suas características de transmissão e os métodos de posicionamento e localização relativa (ToA, TDoA, AoA), listando suas vantagens e limitações; a seção IV explora UWB como tecnologia de transferência de dados; a seção V discute UWB como tecnologia potencialmente capaz de atender às tarefas de posicionamento e transferência de dados de forma simultânea; por fim, a seção VI apresenta as conclusões desse estudo.
2 METODOLOGIA
A pesquisa foi iniciada com a definição do escopo e tema focado na robótica cooperativa, especificamente na interação de múltiplos robôs sendo disciplinada pela comunicação em UWB. A metodolgia adotada envolveu uma abordagem sistemática para identificar e selecionar artigos relevantes sobre o tema. O estudo foi conduzido utilizando bases de dados amplamente reconhecidas no meio acadêmico como Scopus, IEEE Xplore, Science Direct e Google Scholar, entre outras outras bases indexadas e revisadas por pares.
Por meio de palavras-chave como “Ultra Wideband”, “UWB Localization” , “UAV Indoor Localization” e “UWB Data communication”, foram realizadas consultas nas bases cujos resultados foram filtrados para incluir apenas artigos publicados nos últimos 8 anos. Isso ajudou a garantir que estudos mais atualizados fossem considerados para uma primeira análise.
Os resultados foram então criados para uma avaliação preliminar da relevância de cada artigo em relação aos objetivos da pesquisa. Publicações foram selecionadas segundo um critério de abrangência envolvendo sistemas robóticos UAVs. Cerca de 60 referências foram selecionadas, analisadas e sintetizadas. Os resultados foram organizados em uma planilha contendo o título, classificação do conteúdo alvo, um resumo das informações mais importantes e a relevância da publicação segundo um critério que priorizasse a investigação da dinâmica dos sistemas robóticos UAVs em redes UWB. A planilha contribuiu grandemente para disciplinar a localização dos assuntos em suas respectivas referências bibliográficas.
Uma ferramenta de gerenciamento bibliográfico também foi empregada na construção de uma base de dados para a melhor organização das referências e inserção automática das citações ao texto. A ferramenta também foi notavelmente útil para classificar o foco de cada artigo segundo suas aplicações de UWB para os fins de posicionamento/localização, comunicação, e esse duplo aspecto envolvendo UAVs num mesmo cenário. Foram analisados pontos como o as técnicas de posicionamento e a influência do ambiente sobre o desempenho dos agentes. Também foram focados os pontos ligados à fusão de sensores complementares aos nós de UWB na tarefa de posicionamento, e ainda, a capacidade de transmissão de dados em banda ultralarga.
Ao longo dessa pesquisa, grande diversidade de artigos que abordam localização/posicionamento via UWB foi identificada. Percebe-se, entretanto, que há na literatura uma escassez de estudos voltados para a análise da ação combinada entre localização/posicionamento e transmissão de dados, abordagem que dispensaria outras tecnologias de suporte à comunicação. Esta abordagem integrada parece ter relevância ainda não explorada, notadamente no contexto de UAVs. Ela pode dispensar o uso de tecnologias adicionais de suporte à comunicação entre agentes, otimizando a utilização de recursos, minimizando o consumo de energia, proporcionando uma solução mais compacta e econômica e de menor complexidade.
Assim, esse trabalho traz como contribuição a identificação dessa lacuna, cujo enfoque é aqui destacado pela convergência dessas duas facetas por meio da tecnologia de banda ultralarga na direção de soluções integradas, otimizadas e eficientes no âmbito da robótica cooperativa entre UAVs. O artigo faz um apontamento chave por meio de uma análise da aplicação da tecnologia UWB em cenários cooperativos envolvendo UAVs sob o aspecto duplo de localização e transferência de dados, destacando os requisitos essenciais para que essa cooperação seja efetiva no que diz respeito ao canal de comunicação.
3 UWB COMO SISTEMA DE LOCALIZAÇÃO EM TEMPO REAL
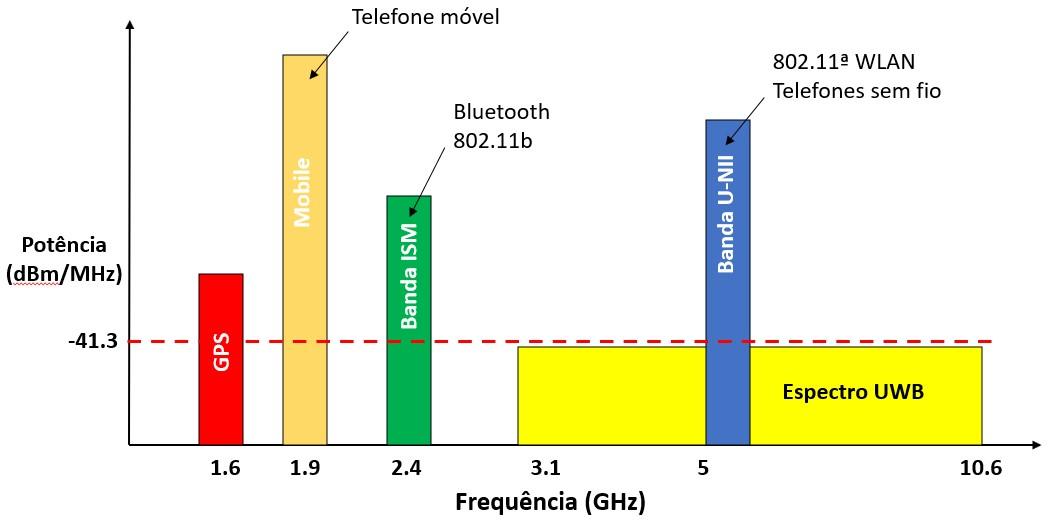
Um sistema de localização em tempo real (RTLS), deve atender à capacidade de localização e rastreamento em tempo real de objetos ou pessoas em uma área limitada. A ideia baseia-se na utilização de duas classes de dispositivos: as âncoras, que são nós fixos em posição estacionária conhecida que atuam como referência para a localização das tags, ou etiquetas, que são os dispositivos a serem localizados e rastreados. (ALARIFI; AL-SALMAN; ALSALEH; ALNAFESSAH et al., 2016).
Dentre as tecnologias de comunicação sem fio capazes de fornecer localização e rastreamento em tempo real, UWB destaca-se com grande potencial para cumprir seus requerimentos (YANG; YANG, 2021). A ampla faixa no espectro de frequência quando comparado com tecnologias como GPS, WIFI, Bluetooth e RFID, permite a comunicação por meio de pulsos ultra curtos, o que garante maior precisão na medição, tornando o mais adequado para aplicações que exigem alta precisão e exatidão (CHOI; LA; LEE, 2018). Diferentemente da transmissão em banda estreita, UWB como impulso de rádio pode transmitir um sinal com tempo de duração extremamente curto, na escala de nanossegundos. Vantagens dessa característica incluem baixa potência média de transmissão, grande capacidade de canal, transceptores UWB simplificados e alta resolução no domínio do tempo (HE; WU; HAN, 2024).
Para (GNAŚ; ADAMKIEWICZ, 2022), a tecnologia UWB é a melhor solução aplicada o problema de localização interna com cálculo baseado no tempo de resposta do transmissor. Com UWB também é possível calcular a posição com base no indicador de força do sinal recebido (RSSI).
Desenvolvida ainda nos anos de 1960, a comunicação em UWB permaneceu sem regulamentação por cerca de 40 anos, período em que seu uso foi estritamente militar. Diante do crescente interesse da indústria e universidades sobre essa tecnologia, impulsionado pelas suas notáveis vantagens, a agência responsável pela regulamentação das telecomunicações nos Estados Unidos, Federal Communication Commission (FCC), estabeleceu no ano de 2002 as regras sobre a emissão de sinais em UWB, o que permitiu sua padronização global marcando assim o início das aplicações comerciais. (KUMAR; PANDYA; MAKAVANA, 2015).
A. Características da transmissão em UWB
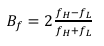
O FCC define UWB como um “tipo de sistema de transmissão sem fio de espectro espalhado que possui largura de banda fracionada instantânea de pelo menos 25% ou, alternativamente, 500 MHz ou mais”, devendo operar na faixa de 3.1-10.6 GHz para operações não militares. No ano de 2003 o regulamento foi alterado passando a incluir a faixa abaixo de 960MHz. (BENGTSON; HEGGEN, 2005).
A potência transmitida permitida pela FCC para comunicação interna é de -41,3 dBm/MHz, ou basicamente 0,5 mW se toda a largura de banda de 7,5 GHz entre 3,1 e 10,6 GHz é usada.(MANZI; FELIZIANI; BEECKMAN; DIJK, 2009), entretanto, é possível a transmissão em faixas de frequências como a de 60GHz, onde os recursos espectrais não são restritos aos -41.3 dBm/MHz (MOLISCH, 2009).
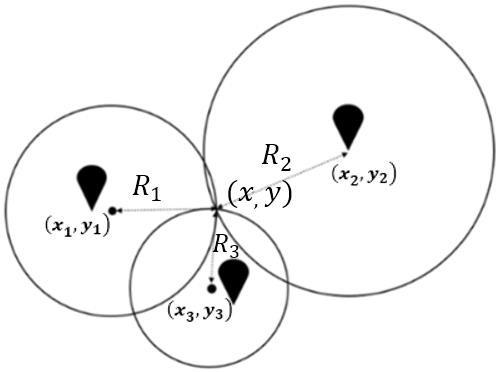
A largura de banda fracionada referida é uma métrica conveniente para medições de sinais UWB, e é definida como:
onde fH e fL são a maior e menor frequência nos pontos de atenuação de 3 dB no sinal, respectivamente. O valor mínimo de 25% , como estabelecido, é muito maior do que qualquer sistema de comunicação sem fio existente. Em função disso, os sistemas UWB atuais podem suportar taxas de transmissão de dados acima de 500 Mbps a um alcance de 10 metros (KUMAR; PANDYA; MAKAVANA, 2015).
No contexto das transmissões em banda ultralarga, os sinais são transmitidos com potência distribuída sobre uma faixa extremamente larga ao longo do seu espectro de frequências, onde cada canal assume pelo menos 500MHz de largura de banda, possibilitando transmitir mais dados em dado período de tempo que as tecnologias tradicionais sem fio (PAKISTAN, 2012)
Sistemas tradicionais em banda estreita modulam sinais dentro de uma frequência portadora específica para a transmissão de informações, assim, a concentração de energia na transmissão está bem definida, o que pode torná-la muito evidente e vulnerável a interceptação (SARKAR; SULTANA, 2018).
As transmissões em UWB operam com densidade espectral de potência abaixo do nível de ruído, os sinais são extremamente difíceis de serem detectados por usuários não autorizados. O nível de potência do UWB está ligeiramente acima do nível de ruído branco no domínio da frequência, resultando na maioria das tecnologias sem fio existentes interpretando o sinal UWB como ruído. Em função disso, os problemas de interferência nas tecnologias sem fio existentes são basicamente insignificantes.
Diversos estudos sobre interferência em outros sistemas sem fio foram motivados pela preocupação decorrente da alta largura de banda de UWB. (MANZI; FELIZIANI; BEECKMAN; DIJK, 2009) afirma que pelo fato de UWB ter seus sinais espalhados no espectro, seu nível de densidade espectral de potência (PSD) é baixo, o que faz com que UWB seja vista como uma tecnologia tolerante do ponto de vista da compatibilidade eletromagnética, não gerando interferência em outros sistemas sem fio, mas apontam que alguns receptores como WIFI posicionados fisicamente muito próximos de transmissores UWB podem ser afetados por interferência.
A esse mesmo respeito, (NGUYEN; NGUYEN; CAO; QIU et al., 2019) avaliam que a baixa potência de transmissão permite que os nós operem por longos períodos sem manutenção, e causam muito pouca interferência em outros sinais sem fio operando na mesma área.
Figura 1 – Espectro de UWB e sistemas tradicionais.
O padrão IEEE 802.15.4-2011 estabelece 16 diferentes canais em UWB podendo ser configurados com 500MHz de largura de banda. (MOHAMMADMORADI; HEYDARIAAN; GNAWALI, 2018).
B. Localização Relativa Via UWB
Ambientes complexos contendo obstáculos se tornam desafiadores por afetarem a propagação do sinal de RF. Reflexões em objetos e estruturas geram duplicidade da onda causando interferências multipercurso degradando a qualidade do sinal. Os sistemas UWB são imunes ao desvanecimento de sinal causado por multipercurso (PASTRAV; SIMEDRONI; PALADE; DOLEA et al.). Durante o processo de recepção por uma âncora, o primeiro caminho pode ser identificado pelo algoritmo de detecção da borda principal do sinal, incorporado no chip UWB.
As informações transmitidas em uma conexão UWB são controladas pela duração entre cada pulso e a localização desses em relação ao tempo. A largura de pulso da ordem de picossegundos favorece a penetração através de obstáculos, fazendo de UWB um ótimo candidato para uso em ambientes onde as barreiras estão presentes e a detecção de objetos é necessária (SHULE; ALMANSA; QUERALTA; ZOU et al., 2020). Suas características de penetração de objetos são muito superiores a outras tecnologias (JIA; GUO; LI; YU et al., 2022).
Uma investigação sobre a transmissão em UWB em ambiente complexo foi apresentada por (ZIKRUL HAKIEM; SALLEHUDDIN MOHAMED, 2023) incluindo a composição de um ambiente contendo vários móveis como obstáculos. Conclui-se daí que a capacidade de UWB de penetração na maioria dos objetos mostra que essa tecnologia pode melhorar o desempenho de posicionamento e localização em relação a outros métodos de última geração em tais ambientes.
No aspecto da linha de visada entre transmissor e receptor, (HAYWARD; VAN LOPIK; HINDE; WEST, 2022) apresenta um estudo resultado da aplicação de técnicas para extrair informações de localização interna por meio de tecnologias como Wifi, Bluetooth, ultrassom e UWB em condições de NLoS. Segundo o autor, o estudo pretende servir de referência para a seleção de tecnologias para sistemas futuros com base nos requisitos. No comparativo entre as tecnologias empregadas, (JIA; GUO; LI; YU et al., 2022) concluiram que UWB é mais adequado onde condições de NLoS estão presentes, tendo ainda um benefício adicional de transmissão de dados.
No entendimento de (DE COCK; TANGHE; JOSEPH; PLETS, 2023), entretanto, sistemas de posicionamento interno baseados em UWB degrada-se significativamente em condições NLoS, sendo a detecção e mitigação dessas condições um problema complexo. Ainda assim, (NGUYEN; NGUYEN; CAO; QIU et al., 2019) avaliam UWB como um candidato quase ideal para qualquer sistema de posicionamento interno.
A alta resolução na temporização do sinal permite maior precisão na medição de distâncias. Devido à borda de subida do sinal ser muito inclinada, o receptor pode determinar com alta precisão o momento de chegada do o sinal, permitindo um alcance em nível centimétrico (COPPENS; SHAHID; LEMEY; HERBRUGGEN et al., 2022).
Isso favorece à observação de (SUN; XIE; XIONG; ZHANG et al., 2022) quando destaca que um pré-requisito para um robô móvel concluir sua tarefa com sucesso é obter dados de navegação relativamente confiáveis, como posição coordenada, ângulo de postura e velocidade.
Sistemas de localização baseados UWB utilizam âncoras para efetuar medições de alcance entre nós fixos e os nós móveis, ou tags. A distância entre um nó que transmite o sinal e seu receptor pode ser estimada de forma consistente com base no tempo de voo do sinal utilizando a velocidade de propagação dos pulsos, que é conhecida. A figura 2 ilustra um cenário de um sistema RTLS.
Figura 2 – Posicionamento RTLS baseado em UWB com 4 âncoras.
Alguns métodos de localização relativa utilizando redes de ancoragem foram desenvolvidos e podem ser classificados nas categorias a seguir (ALARIFI; AL-SALMAN; ALSALEH; ALNAFESSAH et al., 2016):
- Time of Arrival (ToA) (LIU; ZHANG; CAO, 2021)
- Time-difference of Arrival (TDoA) (ZHOU; CHENG, 2021)
- Angle of Arrival (AoA) (HEYDARIAAN; DABIRIAN; GNAWALI, 2020)
- Received Signal Strength (RSSI) (SADOWSKI; SPACHOS, 2018)
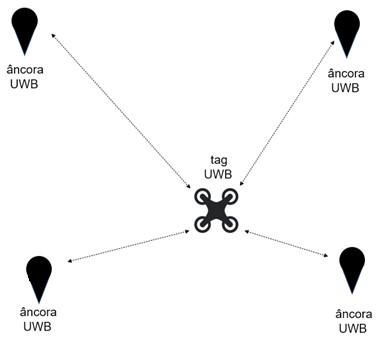
Time of Arrival (ToA): Também conhecido como Time of Flight, calcula a distância entre tag e âncora por meio da medição do tempo de propagação entre esses dois nós e a constante de velocidade de propagação do sinal.
O ToA mede o tempo de voo enviando sinais entre âncoras e tags, então a distância pode ser calculada com um algoritmo de trilateração para a determinação da posição em relação às âncoras, conforme a figura 3. O algoritmo exige que as âncoras podem ser uma tarefa desafiadora na prática. Um desvio do relógio pode facilmente afetar o desempenho de posicionamento, principalmente se a tag se move rapidamente (WU, 2022). A figura 3 ilustra o posicionamento baseado em ToA.
Figura 3 – Posicionamento baseado em ToA.
Onde ( x1,y1 ), ( x2,x2 ) e ( x3,y3 ) são as coordenadas das âncoras 1,2 e 3, respectivamente, e ( x,y ) são as coordenadas da tag. As distâncias entre R1, R2 e R3 entre a tag as âncoras são determinadas como:

(ZIKRUL HAKIEM; SALLEHUDDIN MOHAMED, 2023) ressaltam que ambientes complexos onde os sinais se propagam por múltiplos caminhos, diversas cópias do sinal podem estar presentes e incidirem no receptor em tempos ligeiramente diferentes, gerando erros. Para lidar com esse desafio, os autores sugerem uma abordagem mais sofisticada de detecção, que utilize “informações suaves” em vez de uma decisão binária sobre um limite fixo.
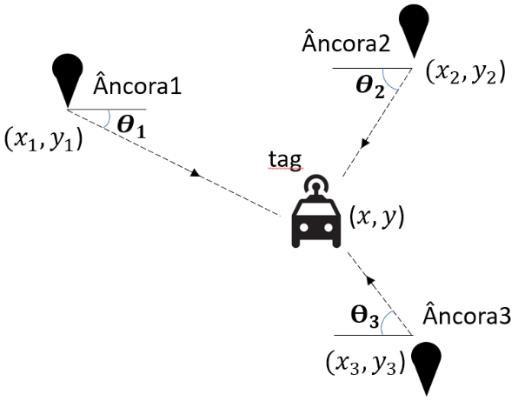
Time-difference of Arrival (TDoA: Mede a diferença do tempo de propagação do sinal entre uma tag e duas âncoras receptoras quaisquer e calcula a diferença de distância entre os dois caminhos (LOU; ZHAO, 2019). É também conhecido como posicionamento hiperbólico.
Considerando uma rede TDoA com quatro âncoras e uma tag, a diferença do tempo de voo do sinal medido entre a i-ésima âncora e a j-ésima âncora, denotada por tij, pode ser convertida para a diferença de distância dij multiplicando-a pela velocidade da luz, porque dij pode ser obtido de dik – djk qualquer âncora pode ser escolhida como âncora de referência. (HUANG; CHEN; WEI; TSAI et al., 2023)
Pelo fato de não depender da distância entre tag e âncora, o TDoA apenas requer sincronicidade entre âncoras, uma vez que o cálculo é baseado na diferença de tempo/distância (BRENA; GARCÍA-VÁZQUEZ; GALVÁN-TEJADA; MUÑOZ-RODRIGUEZ et al., 2017).
A principal diferença entre o ToA e o TDoA é que para o ToA, ambas as partes envolvidas na transação tag/âncora devem ter sincronismo perfeito de relógio para obter precisão.
O TDoA não utiliza diretamente a diferença entre o tempo de emissão e chegada do sinal, mas a diferença de tempo entre os sinais recebidos por múltiplas âncoras UWB para calcular a posição de uma etiqueta UWB em movimento (CHENG; ZHOU, 2019). Assim, para o posicionamento TDoA, as partes envolvidas não precisam estar sincronizadas, mas a medição requer que as âncoras estejam (SHEN, 2022). A figura 4 ilustra um possível cenário de aplicação da técnica.
Figura 4. – Posicionamento baseado em TDoA.
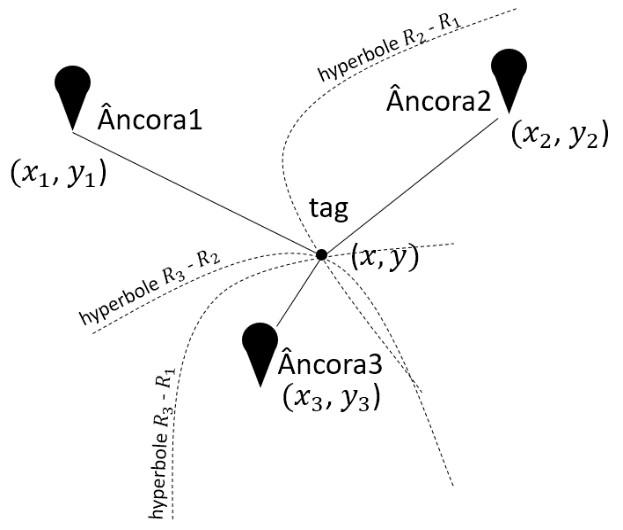
Onde (x1, y1), (x2, y2) e (x3, y3) são as coordenadas das âncoras 1,2 e 3, respectivamente, (x, y) são as coordenadas da tag, R1, R2 e R3 são as distâncias da tag para as âncoras 1, 2 e 3, respectivamente:
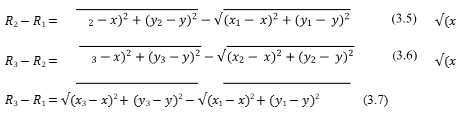
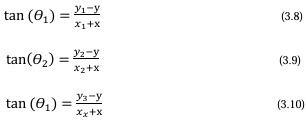
Angle of Arrival (AoA): Faz a estimação do ângulo de chegada do sinal em uma tag através de uma antena direcional ou arranjo de antenas no lado âncora. Com base na intersecção das linhas de propagação, as coordenadas do dispositivo alvo podem ser calculadas (GARG; GUPTA, 2020). O cálculo é feito comparando a fase da portadora ou a amplitude do sinal por múltiplas antenas (BIBBÒ; CAROTENUTO; DELLA CORTE, 2022).
Uma abordagem mais primitiva consiste em calcular a diferença de fase de chegada usando dois receptores UWB sincronizados a partir do mesmo cristal oscilador, de posse da informação da fase dos sinais, calcula-se a diferença de fase para mapear o ângulo de chegada
(ZIKRUL HAKIEM; SALLEHUDDIN MOHAMED, 2023). A principal vantagem do AoA é que a localização da tag pode ser estimada com um valor mínimo de âncoras, sendo necessárias duas âncoras em um ambiente 2D ou três âncoras em um ambiente 3D. Embora AoA possa fornecer dados precisos quando a distância do transmissor-receptor é pequena, requer um hardware mais complexo (ZAFARI; GKELIAS; LEUNG, 2017). A figura 5 ilustra um possível cenário para aplicação de AoA.
Figura 5 – Posicionamento baseado em AoA.
Onde (x1, y1), (x2, y2) e (x3, y3) são as coordenadas das âncoras 1,2 e 3, respectivamente, e (x, y) são as coordenadas da tag. Os ângulos 01, 02 e 03, formados pelo caminho do sinal das âncoras para a tag são definidos como:
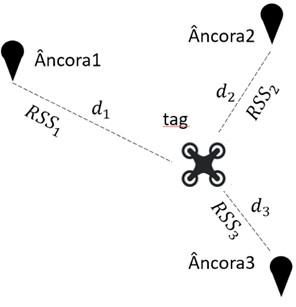
Received Signal Strength Indicator (RSSI): Calcula a distância entre uma tag e diversas âncoras medindo a potência dos sinais recebidos e a aplicando um modelo de propagação apropriado para o ambiente. O cálculo é baseado na potência recebida e na relação entre a atenuação do sinal e a distância percorrida. Como a potência transmitida é conhecida, é possível calcular sua atenuação (BIBBÒ; CAROTENUTO; DELLA CORTE, 2022).
De fato, uma vez que a atenuação do sinal é diretamente proporcional à distância percorrida, com o uso de valores teóricos e modelos empíricos baseados na lei de propagação do sinal, é possível derivar a distância (AL-BAWRI; ISLAM; SINGH; JAMLOS et al., 2022). Entretanto, vários fatores podem afetar a precisão do método. Interferência e reflexão do sinal podem causar variações na intensidade do sinal recebido, e estimativas com base apenas no RSSI podem não ser precisas. A figura 6 ilustra um possível cenário para aplicação da técnica.
Figura 6 – Posicionamento baseado em RSS.
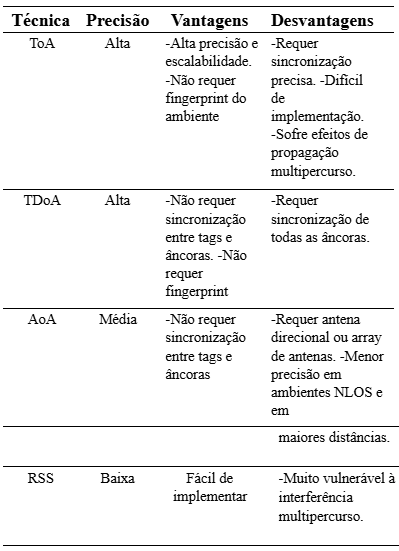
As principais características das técnicas apresentadas podem ser resumidas conforme a tabela 1, que também mostra um comparativo entre elas:
Tabela 1 – Principais características das técnicas de posicionamento.
4 UWB COMO SISTEMA DE TRANSFERÊNCIA DE DADOS
Além da reconhecida capacidade de gerenciamento em localização relativa e posicionamento precisos, a comunicação em UWB também se destaca pelo seu potencial em transferência de dados. Operando em largura de banda extremamente ampla, o UWB permite taxas de transferência significativamente mais elevadas em comparação com tecnologias convencionais de curto alcance, possibilitando a transmissão de grandes volumes de dados.
A. Capacidade do Canal UWB
Um conceito chave para o entendimento do notável potencial de UWB para comunicação de dados é a capacidade de um canal de comunicação, que representa a taxa teórica máxima na qual a informação pode ser transmitida de forma confiável através do canal. Assim, é de grande utilidade a investigação do teorema de Shannon, que relaciona a capacidade do canal de transmissão à sua largura de banda e relação sinal/ruído:
onde C é a capacidade do canal em bits/segundo, B é a largura de banda do canal em Hz, S é a potência do sinal e N é a potência do ruído.
A equação nos conta que a capacidade de um canal de comunicação cresce linearmente com a largura de banda B, enquanto sua dependência da potência do sinal S é logarítmica. Como o canal UWB tem abundância de largura de banda, ele pode negociar parte dessa largura de banda contra potência de sinal reduzida e interferência de outras fontes, o que a torna uma tecnologia bastante atraente para aplicações que demandam comunicação robusta e de alta velocidade (PAKISTAN, 2012).
A relação sinal-ruído (SNR) também afeta a taxa máxima de transmissão que um canal de comunicação pode suportar. Aumentar a SNR ou a largura de banda pode garantir uma capacidade de canal maior, resultando em taxas de transmissão de dados mais atraentes. (SARKAR; SULTANA, 2018) alertam, entretanto, que a capacidade do canal não pode aumentar indefinidamente com a largura de banda uma vez que a potência do ruído tende a aumentar com larguras de banda mais amplas, limitando a capacidade de transmissão de dados alcançável do canal.
Figura 7 – Capacidade do canal de Shannon para SNR=1.
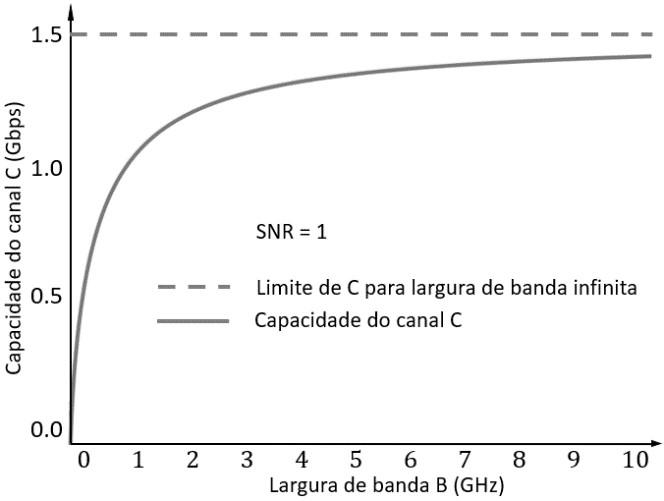
De fato, analisando a figura 7, que representa o gráfico característico da equação de Shannon para uma relação sinal-ruído unitária, percebemos que a variável dependente C, que representa a capacidade do canal, tende a um valor limite quando a largura de banda tende ao infinito.
B. Esquema de Modulação
Um exame sobre alguns aspectos do padrão IEEE 802.15.4 é crucial para o entendimento de como a transferência de dados em UWB é processada. O padrão inclui as especificações para a implementação da tecnologia em sua camada física (PHY) e de controle de acesso ao meio (MAC).
Ele estabelece um esquema com dois tipos de modulação. Uma usando a modulação de posição de burst (rajada), o BPM, outro usando chaveamento de mudança de fase binária (BPSK). Esses métodos não podem ser usados de forma isolada, mas de forma sequencial, onde o sinal de informação modula bits sistemáticos pela posição (da rajada) e adicionalmente pela fase (do sinal) para um canal redundante.
Ao modular o bit de informação em posição e em fase, o sistema de comunicação pode aproveitar as vantagens de ambas as técnicas, abordagem comumente utilizada para aumentar a robustez e a confiabilidade da transmissão em ambientes ruidosos (PASO; NIEMELÄ; HAAPOLA; HÄMÄLÄINEN et al., 2015).
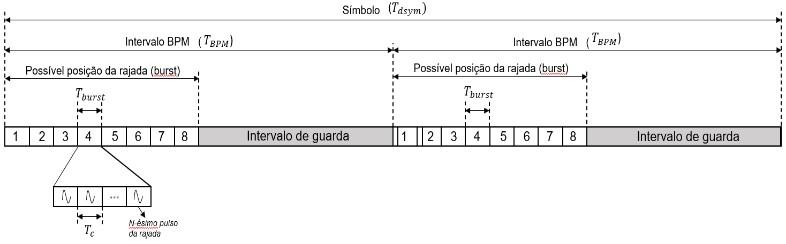
A documentação oficial do padrão apresenta informações relevantes de como um símbolo de informação é organizado dentro de um trem de pulsos a ser transmitido.
Conforme ilustra a figura 8, o BPM divide um símbolo de informação em duas metades, definindo assim dois intervalos com duração Tbpm = Tdsym/2 cada. Cada intervalo é novamente dividido em duas metades, uma onde é possível ocorrer uma rajada em dada posição desse intervalo, e a outra uma banda de guarda que evita interferência de outros nós que também estão enviando dados. Uma rajada é formada por Ncbp pulsos de comprimento Tc* Ela pode ser enviada na primeira ou segunda metade do símbolo, a informação sobre o bit transmitido é codificada pela posição da rajada dentro do símbolo.
Figura 8 – Estrutura de um símbolo de informação padrão IEEE 802.15.4.
Além do BPM, o esquema emprega o BPSK na determinação da paridade do bit através da manipulação da fase do sinal da rajada (burst). Em termos simples, a fase da rajada, que é a portadora do sinal, é invertida para representar os diferentes bits, entre “0” e “1”. A figura 9 apresenta o diagrama de um codificador BPM-BPSK. A saída superior corresponde ao BPM, que determina o bit pela posição da rajada. A saída inferior representa o BPSK, onde o bit é determinado pela fase da rajada.
Figura 9 – Esquema de modulação BPM-BPSK.
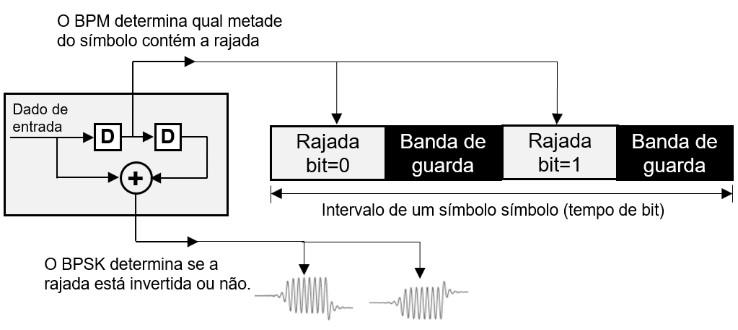
Essas modulações combinadas no esquema BPM-BPSK garantem uma transmissão de dados eficiente e confiável nos sistemas UWB.
C. Evolução do Padrão
O padrão IEEE 802.15.4z, um avanço do IEEE 802.15.4, introduziu melhorias na transmissão de pacotes de dados (SEDLACEK; SLANINA; MASEK, 2019). Através da configuração do campo PHR (Physical Header) é possível ajustar a quantidade de bytes a ser enviada em um único pacote, expandindo o payload de 7 bits na configuração padrão para até 12 bits. Essa atualização viabiliza um aumento significativo no comprimento máximo permitido para o payload, expandindo de 128 para 4096 bytes (YANG; YANG, 2021).
Uma outra melhoria na atualização do padrão é a ampliação no suporte à frequência de repetição de pulso (PRF). Conforme mencionado, na comunicação em UWB o bit de informação é enviado na forma de um trem de pulsos, em que a velocidade de envio pode ser configurada por um parâmetro básico chamado Frequência de Repetição de Pulso (PRF). Esse parâmetro define o intervalo entre o envio de dois pulsos consecutivos.
O aumento da PRF resulta em maior quantidade de pulsos sendo transmitidos em determinado intervalo de tempo, isso aumenta a quantidade de eventos de decisão de limiar, permitindo assim que o receptor UWB faça uma melhor avaliação do sinal recebido (SEDLACEK; SLANINA; MASEK, 2019). A evolução para o IEEE 802.15.4z elimina o suporte para PRFs de 4 e 16MHz, e suporta valores mais altos de 128 e 256MHz. Uma maior PRF aumenta a resolução temporal, e consequentemente a precisão na medição de distâncias. Para (NGUYEN; NGUYEN; CAO; QIU et al., 2019), medições em UWB são capazes de obter alta precisão com erro de até 10 cm e alcance máximo de até 50 m, sem mencionar sua capacidade de comunicação.
Todas essas características técnicas favoráveis dentro do contexto da comunicação de dados em banda ultralarga têm motivado pesquisadores a explorarem esse potencial. Pesquisas recentes realizadas sobre UWB trouxeram resultados muito precisos no que se refere à localização, mas o aspecto da comunicação de dados não recebeu muita atenção (MOHAMMADMORADI; HEYDARIAAN; GNAWALI, 2018). Os autores mencionam que aplicações que requerem localização e comunicação usam peças separadas de hardware e software para cada uma dessas tarefas, como Wifi e Bluetooth, o que aumenta a complexidade do sistema.
Em ambientes de colaboração multidrone, (YANG; LEE, 2023) defende que UWB é uma excelente alternativa na medição precisa de distâncias em cenários onde o GNSS pode ser falho, e ressalta a importância dessa tecnologia em permitir trocas adicionais de informações em canais secundários. Os autores realizaram simulações e um experimento prático envolvendo 4 drones em voo de formação. O resultado demonstrou a aplicabilidade e eficácia do sistema UWB em um ambiente real.
Em (BONCI; CAIZER; GIANNINI; GIUGGIOLONI et al., 2023) há uma discussão sobre o potencial de UWB para a implementação de casos de uso na indústria 4.0. O trabalho salienta que, embora as aplicações de UWB sejam amplamente utilizadas em sistemas de comunicação, radar e sistemas de posicionamento, poucos trabalhos se concentraram em aplicações industriais. O experimento prático realizado envolveu a implementação de uma rede de sensores UWB para monitoramento de vibrações de máquinas para a extração em tempo real de características diagnósticas e prognósticas por sinais de alta frequência. Testes preliminares apresentaram resultados que incluem a transmissão de dados de acelerômetro a taxas de até 6,8 Mbit/s, com taxa de perda de pacotes máxima de apenas 2,44%. Conclui-se que UWB pode ser aplicado em monitoramento de ambientes industriais reais e gerar notificações em tempo real sobre anomalias.
5 LOCALIZAÇÃO E TRANSFERÊNCIA DE DADOS EM UWB
Como mencionado, os sistemas UWB emergiram como uma das principais tecnologias para posicionamento crítico, sendo considerado uma das soluções mais adequadas em aplicações de medição de alcance e transferência de dados em anos, impulsionado por substanciais vantagens sobre outras tecnologias sem fio, sugere a capacidade dessa tecnologia em atender aos requerimentos de localização relativa e transferência de dados de forma simultânea, dispensando tecnologias subsidiárias para tal propósito.
Essa dupla perspectiva em torno de UWB motivou pesquisadores cujas contribuições de seus trabalhos ajudam a sustentar a presente hipótese. Uma reflexão sobre a subutilização de UWB na medição de alcance combinada à transferência de dados é apresentada em (YU; LI; JORGE PEÑA; HEIKKONEN et al., 2021). O autor entende que a incomparável capacidade de posicionamento de UWB é a principal razão por detrás da sua aceitação, mas seu potencial para atuar concomitantemente como canal de comunicação em rede permanece praticamente inexplorado. (YU; LI; JORGE PEÑA; HEIKKONEN et al., 2021) defendem ainda que UWB oferece vantagens como menor latência, alta largura de banda e menor taxa de perda de pacotes em comparação com tecnologias como Zigbee, tornando-o uma tecnologia promissora para aplicações industriais emergentes onde um sistema sem fio é uma necessidade. Outra observação da mesma pesquisa é que UWB está sendo explorado para redes ad-hoc e posicionamento em sistemas autônomos, o que destaca a versatilidade e o potencial de UWB não apenas para tarefas de localização, mas também para comunicação em ambientes industriais e robóticos
De acordo com (KABBINALE; BANSAL; GOPALAN, 2023), os recursos de UWB vão muito além da capacidade de medir distâncias, podendo também serem usados para detecção de alta resolução e transferência de dados. (KABBINALE; BANSAL; GOPALAN, 2023) cita dois casos de uso: o primeiro é o sistema de pagamento sem contato, onde UWB permite combinar a capacidade de determinar com precisão a proximidade entre um dispositivo móvel e o dispositivo de pagamento, e a capacidade de transferência de dados.
O segundo caso de uso explora a alta velocidade de transferência de dados de UWB combinada à medição de distância para determinar a localização relativa e orientação de um headset de realidade virtual e outros periféricos, fazendo então a transferência dessas informações entre as unidades sem a necessidade de tecnologias adicionais para isso.
Um método para localização e rastreamento de um alvo terrestre por um drone utilizando medições de posição e transferência de dados baseadas em UWB é proposto por (NGUYEN; ZAINI; WANG; GUO et al., 2019). Tal método faz a fusão de dados obtidos por IMU, altímetro e fluxo óptico, utilizando um Filtro de Kalman Estendido capaz de estimar a posição relativa precisa e estável para o controle de voo. O sistema é adaptado para cenários de cooperação entre o UAV e um UGV, onde a capacidade de comunicação UWB é utilizada para transferir a orientação do alvo para o UAV. Os experimentos demonstram a capacidade do UAV de controlar sua posição em relação ao alvo de forma autônoma, independentemente de o UGV estar parado ou em movimento com velocidade desconhecida, revelando a robustez do sistema UWB. O trabalho de (NGUYEN; ZAINI; WANG; GUO et al., 2019) mostra que é possível executar as tarefas de posicionamento e transferência de dados sem a necessidade de uma tecnologia adicional para esse fim.
A capacidade de tráfego em UWB também foi explorada por (MOHAMMADMORADI; HEYDARIAAN; GNAWALI, 2019) ao desenvolver uma nova técnica que foi denominada de Simultaneous Ranging and Communication (SRAC). O autor destaca a importância de UWB para localização precisa em redes sem fio e propõe uma técnica que explora a capacidade de tráfego por meio de um algoritmo adaptativo para reduzir a sobrecarga na rede UWB. O SRAC integra tarefas de medição de distância e comunicação otimizando o uso de sinais UWB tanto para estimativa de distância quanto para transferência de dados. O algoritmo é capaz de alternar dinamicamente entre modos de medição ativa e passiva com base nos requisitos de tráfego. Esse comportamento adaptativo do SRAC garante que as operações de medição de distância sejam otimizadas de acordo com as condições atuais da rede.
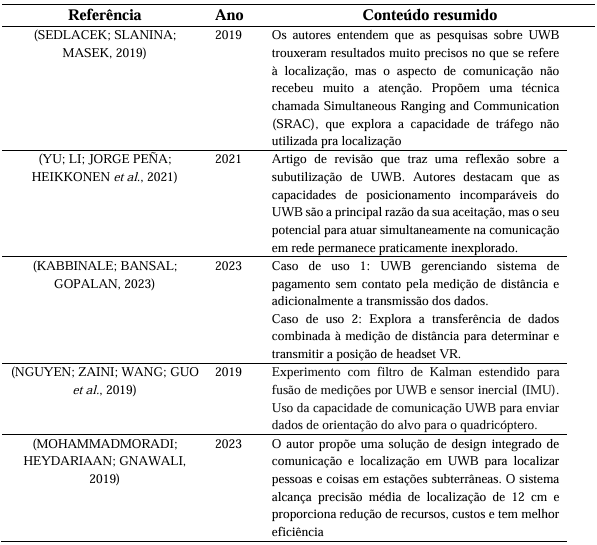
Tabela 2 – Artigos contemplando localização e comunicação em UWB
Um outro trabalho digno de nota é o de (SUN; HUANG; XIA; SHAO et al., 2023), que aborda a importância da localização de pessoas e equipamentos em subestações subterrâneas, destacando as limitações de tecnologias tradicionais como WiFi e RFID nesses ambientes. O autor propõe uma solução de design integrado de comunicação e localização baseada em UWB para superar tais desafios. O sistema proposto inclui estações base de comunicação UWB, tags de destino e um servidor local, com ênfase em redes mesh para facilitar o roteamento e a configuração de toda a rede. O sistema de (MOHAMMADMORADI; HEYDARIAAN; GNAWALI, 2019) alcança uma precisão média de localização de 12 cm com economia de recursos, redução de custos e melhoria da eficiência do sistema em decorrência da integração de comunicação e localização na mesma estação base UWB.
As contribuições científicas identificadas neste estudo contemplando o duplo aspecto de localização relativa e transferência de dados por meio de UWB estão resumidas na tabela a seguir.
6 ANÁLISE E DISCUSSÃO
A literatura analisada, de um modo geral, enfatiza o potencial da tecnologia UWB para aplicações de localização interna confiável, conforme sintetiza (DE COCK; TANGHE; JOSEPH; PLETS, 2023) ao destacar a alta resolução temporal na medição de distâncias e a alta inclinação na borda de subida do sinal favorecendo uma detecção com precisão em nível centimétrico.
Adicionalmente ao aspecto da medição precisa de distâncias, a literatura também aponta UWB como tecnologia com destacada capacidade de comunicação de dados devido à sua abundante largura de banda, a exemplo da pesquisa de (MANZI; FELIZIANI; BEECKMAN; DIJK, 2009), que defende que os sistemas UWB substituirão conexões via cabo de barramento USB.
Entretanto, a presente pesquisa identificou uma lacuna quanto ao emprego de UWB nas operações de localização relativa e comunicação de dados em um mesmo protocolo UWB, sobretudo na área da robótica cooperativa. A concepção central dessa abordagem visa reduzir a complexidade na arquitetura geral do sistema. Cada módulo adicional de hardware a bordo de um UAV aumenta o peso, o custo e o consumo de energia, além de sobrecarregar a estrutura do software embarcado e seus protocolos adicionais. Assim, parece haver uma notável viabilidade operacional, econômica, técnica, e de manutenção em empregar UWB como uma solução abrangente para localização e comunicação, eliminando a necessidade de sistemas complementares.
Para que essa ideia se cumpra com fidelidade, alguns pontos relevantes dentro da bibliografia analisada podem fornecer a chave para uma implementação eficiente. Como o sistema UWB é extremamente dependente do sistema de ancoragem, a escolha da quantidade de âncoras, sua disposição e a sua correta configuração, são aspectos de vital importância para a implementação da comunicação e localização simultâneas. Similarmente, o sistema depende dos módulos escolhidos e de sua correta parametrização, em especial, relacionada à como estes módulos acessarão ao meio físico. Por fim, outro aspecto a ser considerado é a escolha de qual estratégia será adotada para alcançar este objetivo, ou seja, qual algoritmo embarcado será utilizado para realização da comunicação e localização. Nesse contexto, a análise a seguir considera as contribuições de alguns pesquisadores que obtiveram sucesso em suas pesquisas e ajudam a sustentar a ideia defendida neste artigo.
A. Rede de Ancoragem
A concepção que emprega UWB como uma solução abrangente para localização precisa e comunicação, requer antes um planejamento estratégico a fim de que todo esse potencial seja efetivamente convertido em desempenho e confiabilidade a serviço do sistema robótico, sobretudo em ambientes cooperativos envolvendo UAVs.
É de grande valia, portanto, um estudo prévio sobre a rede de ancoragem a ser adotada no ambiente. Uma distribuição correta de âncoras e tags é crucial para a otimização da relação entre custo operacional do sistema, geometria de medição favorável e cobertura de sinal suficiente, notadamente em ambientes onde condições de NLOS estão presentes.
A densidade e a disposição das âncoras e tags, além de influenciarem significativamente a precisão do posicionamento, também exerce forte impacto no desempenho da comunicação e transferência de dados. Assim, testes extensivos em diferentes ambientes são fundamentais para melhor compreensão sobre o desempenho de diferentes topologias do sistema, além da identificação de possíveis fontes de erro.
O trabalho de (NGUYEN; ZAINI; WANG; GUO et al., 2019) é aqui tomado como exemplo de planejamento estratégico da rede de ancoragem que permitiu a localização relativa de um UAV em relação a um UGV em uma sala interna com transmissão de dados pela própria rede UWB. Ao invés de posicionar âncoras fixas no ambiente de operação, os pesquisadores optaram por colocar 2 âncoras a bordo do UGV em lados opostos, e 5 tags no UAV, sendo uma em cada extremidade do quadricóptero, e uma tag central para comunicação com um laptop.
Os resultados do experimento de (NGUYEN; ZAINI; WANG; GUO et al., 2019) demonstraram a eficácia do sistema integrado de localização relativa e comunicação para permitir o controle da posição relativa do UAV em relação UVG, mesmo esse último estando em movimento e em velocidade desconhecida.
B. Parâmetros da Camada Física
Outro aspecto igualmente importante a ser considerado para o êxito na gestão integrada de localização e comunicação de dados é a configuração de parâmetros da camada física de UWB. Estratégias diferenciadas de detecção do sinal podem ser adotadas para mitigar problemas associados à multipercurso, conforme orienta (ZIKRUL HAKIEM; SALLEHUDDIN MOHAMED, 2023). A escolha do comprimento do preâmbulo e payload, por exemplo, exerce implicações significativas no desempenho da localização e transferência de dados.
Pacotes muito longos aumentam a utilização do espectro de RF podendo causar problemas de interferência entre os nós UWB, aumentando assim a taxa de erros e consequentemente a retransmissão de pacotes. Em contraste, um payload muito curto pode afetar negativamente a taxa de dados. O gerenciamento da eficiência energética também é afetado pelas escolhas de preâmbulo e payload, assim como a escolha da frequência de repetição dos pulsos, PRF.
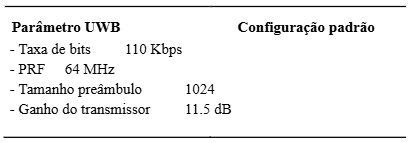
A pesquisa de (ZIKRUL HAKIEM; SALLEHUDDIN MOHAMED, 2023) demonstra a importância da correta configuração de parâmetros na camada física, onde um experimento prático envolveu a implementação de um sistema de posicionamento interno, no qual foi posicionada uma âncora em cada um dos 4 cantos de uma sala como pontos de referência. Apesar da condição LOS do experimento, alguns móveis representando obstáculos foram introduzidos no ambiente. Por meio de uma tag móvel, foram realizadas medições de distâncias em 5 diferentes pontos, primeiramente utilizando configurações padrão do módulo UWB, e em seguida, essas configurações foram refinadas e novas leituras foram realizadas.
A tabela 3 mostra as configurações padrão usadas na primeira leitura.
Tabela 3 – Artigos contemplando localização e comunicação em UWB.
A tabela IV mostra as configurações refinadas para a segunda leitura.
Tabela 4 – Artigos contemplando localização e comunicação em UWB
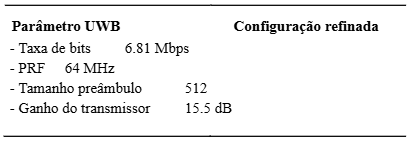
Os resultados do experimento de (ZIKRUL HAKIEM; SALLEHUDDIN MOHAMED, 2023) mostram que o refinamento nas configurações UWB trouxeram melhoria significativa na precisão das medições de posição. Mesmo os menores movimentos das etiquetas resultaram em leituras de posição mais precisas, com medições na faixa de milímetros.
C. Estratégias do Algoritmo
A otimização do design da rede UWB para que se cumpra a perspectiva de localização e comunicação de forma satisfatória também deve passar pela escolha estratégica do algoritmo e método de localização a ser aplicado. Cada método traz seus próprios méritos e limitações, e a escolha do mais adequado dependerá das características do ambiente e dos requisitos de precisão do sistema.
Combinar diferentes técnicas e utilizar abordagens híbridas pode ser uma estratégia eficaz para melhorar a precisão e a confiabilidade do sistema. Por exemplo, priorizar operações de localização relativa durante períodos críticos, pode permitir uma rápida atualização da posição dos agentes, mantendo a sincronização e prevenindo colisões, por outro lado, identificar momentos específicos em que a comunicação de dados é crucial, como durante a coordenação de tarefas complexas ou durante a execução de manobras colaborativas para dar ênfase a comunicação de dados.
Para ilustrar esse ponto, é conveniente citar o trabalho de (MOHAMMADMORADI; HEYDARIAAN; GNAWALI, 2019), onde a técnica SRAC otimiza a operação em redes UWB ao combinar a medição de distância entre nós e a comunicação de dados de forma simultânea. O SRAC emprega um algoritmo de agendamento adaptativo que monitora o tráfego de medição e de comunicação na rede UWB. Com base em parâmetros como tamanho da janela, taxa de medição, limite de atraso e tamanho do buffer, o algoritmo decide o regime de medição mais adequado para otimizar o tráfego de rede.
O SRAC demonstrou uma redução efetiva de até 40% no tráfego total da rede. Os resultados indicam que o SRAC é capaz de manter a precisão na estimativa de distância entre nós, com erros de medição inferiores a 7 cm e uma média de cerca de 5 cm. Esses resultados destacam a eficácia da técnica em otimizar a operação na rede UWB contribuindo para uma comunicação mais eficiente e confiável entre os nós da rede.
D. Considerações Finais
Percebe-se, portanto, que há um espaço ainda pouco explorado no que diz respeito à abordagem integrada que permitiu que as pesquisas citadas nas análises obtivessem êxito nos seus experimentos. As análises mostram, entretanto, que sempre há um ponto de equilíbrio a ser alcançado no design de um novo sistema, seja através das escolhas da rede de ancoragem, dos inúmeros parâmetros de configuração da camada física ou das técnicas trabalhadas pelo algoritmo. Assumir determinada estratégia inevitavelmente resultará na penalização de algum outro aspecto do conjunto. Logo, é fundamental encontrar uma configuração que atenda aos requisitos do sistema, otimizando seu desempenho e minimizando suas restrições.
Cabe ao projetista ter a consciência desse trade-off inevitável e a percepção de trabalhar as variáveis de design de forma equilibrada, garantindo que o sistema final seja robusto, eficiente e capaz de atender aos objetivos propostos.
7 CONCLUSÃO
Em síntese, este artigo explorou o uso da tecnologia UWB em ambientes cooperativos de UAVs, destacando seu potencial para aprimorar a comunicação e a localização relativa desses sistemas robóticos. A pesquisa demonstrou que a integração da capacidade de localização relativa precisa com a eficiência na transferência de dados proporcionada pelo UWB, representa uma abordagem inovadora e promissora para a robótica cooperativa.
O estudo revisitou as principais características e vantagens de UWB, como a alta precisão na medição de distâncias e a capacidade de transferência de grandes volumes de dados em alta taxa. Além disso, a pesquisa identificou lacunas na literatura existente, sugerindo a necessidade de aprofundar investigações sobre a aplicação do UWB em operações de localização e comunicação em ambientes colaborativos.
A combinação das notáveis características de medição de distância e de transferência de dados um único sistema UWB pode impulsionar grandes avanços na interação entre múltiplos robôs em tarefas cooperativas, impulsionando o desenvolvimento de sistemas robóticos autônomos e eficazes em operações complexas, como monitoramento industrial, inspeção de infraestrutura e operações de busca e salvamento.
Essa pesquisa pretende contribuir para que esse paradigma seja uma tendência no contexto da robótica colaborativa. Espera-se que o presente artigo possa inspirar novas pesquisas e aplicações práticas, consolidando UWB como tecnologia impulsionadora para a criação de soluções inteligentes e inovadoras.
AGRADECIMENTOS
Os autores agradecem a CAPES pelo financiamento da bolsa de mestrado e à Fundação de Amparo à Pesquisa do Estado de Minas Gerais (FAPEMIG) pelo apoio ao Projeto Robô Patos APQ-02616-22.
REFERÊNCIAS
AL-BAWRI, S. S.; ISLAM, M. T.; SINGH, M. J.; JAMLOS, M. F. et al. RSS-Based Indoor Localization System with Single Base Station. Computers, Materials \& Continua, 70, n. 3, 2022.
ALARIFI, A.; AL-SALMAN, A.; ALSALEH, M.; ALNAFESSAH, A. et al. Ultra Wideband Indoor Positioning Technologies: Analysis and Recent Advances. Sensors, 16, p. 1-36, 05/16 2016.
BENGTSON, F.; HEGGEN, S. A Data Communication System Using Ultra Wideband (UWB) Technology. Proceedings of the 2005 National Conference on Undergraduate Research (NCUR), Washington and Lee University, Virginia Military Institute, Lexington, Virginia, 01/01 2005.
BIBBÒ, L.; CAROTENUTO, R.; DELLA CORTE, F. An Overview of Indoor Localization System for Human Activity Recognition (HAR) in Healthcare. Sensors, v.22, n. 21, DOI: 10.3390/s22218119.
BONCI, A.; CAIZER, E.; GIANNINI, M. C.; GIUGGIOLONI, F. et al. Ultra Wide Band communication for condition-based monitoring, a bridge between edge and cloud computing. Procedia Computer Science, 217, p. 1670-1677, 2023/01/01/ 2023.
BRENA, R. F.; GARCÍA-VÁZQUEZ, J. P.; GALVÁN-TEJADA, C. E.; MUÑOZ-RODRIGUEZ, D. et al. Evolution of Indoor Positioning Technologies: A Survey. Journal of Sensors, 2017, p. 2630413, 2017/03/29 2017.
BRUNACCI, V.; ANGELIS, A. D. Fusion of UWB and Magnetic Ranging Systems for Robust Positioning. IEEE Transactions on Instrumentation and Measurement, 73, p. 1-12, 2024.
CHEN, S.; XING, A.; LI, X.; WANG, Y. et al., 2023, Robust UWB Navigation System for UAV Swarm. 101105.
CHENG, Y.; ZHOU, T. UWB Indoor Positioning Algorithm Based on TDOA Technology. 2019. 777-782 p.
CHOI, B.; LA, K.; LEE, S., 2018, UWB TDOA/TOA measurement system with wireless time synchronization and simultaneous tag and anchor positioning. 1-6.
CHUNXU, L.; HENRY, B.; TOBY, W. Ultra-Wideband Communication and Sensor Fusion Platform for the Purpose of Multi-Perspective Localization 2022.
COPPENS, D.; SHAHID, A.; LEMEY, S.; HERBRUGGEN, B. V. et al. An Overview of UWB Standards and Organizations (IEEE 802.15.4, FiRa, Apple): Interoperability Aspects and Future Research Directions. IEEE Access, 10, p. 70219-70241, 2022.
DE COCK, C.; TANGHE, E.; JOSEPH, W.; PLETS, D. Robust IMU-Based Mitigation of Human Body Shadowing in UWB Indoor Positioning. Sensors, 23, n. 19, 2023. Article.
DROBCZYK, M.; STROWIK, C.; PHILPOT, C., 2017, A wireless communication and positioning experiment for the ISS based on IR-UWB. Disponível em: https://www.scopus.com/inward/record.uri?eid=2-s2.085019651972&doi=10.1109%2fWCNC.2017.7925487&partnerID=40&md5=7ccdec9b0ed53d38091e2 b4c2ab15cc8.
FAMILI, A.; STAVROU, A.; WANG, H.; PARK, J. M. PILOT: High-Precision Indoor Localization for Autonomous Drones. IEEE Transactions on Vehicular Technology, 72, n. 5, p. 6445-6459, 2023.
GARG, A.; GUPTA, A. Indoor tracking using BLE -brief survey of techniques. 2020.
GNAŚ, D.; ADAMKIEWICZ, P. INDOOR LOCALIZATION SYSTEM USING UWB. Informatyka, Automatyka, Pomiary w Gospodarce i Ochronie Środowiska, 12, n. 1, p. 15-19, 03/31 2022.
HAYWARD, S. J.; VAN LOPIK, K.; HINDE, C.; WEST, A. A. A Survey of Indoor Location Technologies, Techniques and Applications in Industry. Internet of Things, 20, p. 100608, 2022/11/01/ 2022.
HE, C.; WU, P.; HAN, L. Time of Arrival Estimation for Backscatter UWB. IEEE Signal Processing Letters, 31, p. 1124-1128, 2024.
HEYDARIAAN, M.; DABIRIAN, H.; GNAWALI, O., 2020, AnguLoc: Concurrent Angle of Arrival Estimation for Indoor Localization with UWB Radios. 112-119.
HUANG, S.-P.; CHEN, C.-B.; WEI, T.-Z.; TSAI, W.-T. et al. Range-Extension Algorithms and Strategies for TDOA Ultra-Wideband Positioning System. Sensors, v.23, n. 6, DOI: 10.3390/s23063088.
IEEE Draft Standard for Low-Rate Wireless Networks Amendment: Enhanced High Rate Pulse (HRP) and Low Rate Pulse (LRP) Ultra Wide-Band (UWB) Physical Layers (PHYs) and Associated Ranging Techniques. IEEE P802.15.4z/D07, March 2020, p. 1-171, 2020.
JIA, J.; GUO, K.; LI, W.; YU, X. et al. Composite Filtering for UWB-Based Localization of Quadrotor UAV With Skewed Measurements and Uncertain Dynamics. IEEE Transactions on Instrumentation and Measurement, 71, p. 1-13, 2022.
KABBINALE, A. R.; BANSAL, A.; GOPALAN, K. S., 2023, Towards Next-generation Ultra-Wideband Technology. 830-834.
KAO, P. Y.; CHANG, H. J.; TSENG, K. W.; CHEN, T. et al. VIUNet: Deep Visual–Inertial–UWB Fusion for Indoor UAV Localization. IEEE Access, 11, p. 61525-61534, 2023.
KULIKOV, R. S., 2018, Integrated UWB/IMU system for high rate indoor navigation with cm-level accuracy. 1-4.
KUMAR, V.; PANDYA, S.; MAKAVANA, R. ULTRA WIDE BAND (UWB) COMMUNICATION & ITS APPLICATIONS. 2015.
LI, T.-y.; DUAN, F.-j.; LIANG, C.-j.; JIANG, J.-j. et al. A high-precision unmanned aerial vehicle positioning system based on ultra-wideband technology. Measurement Science and Technology, 32, n. 5, p. 055101, 2021/03/12 2021.
LIU, F.; ZHANG, T.; CAO, P. Asynchronous Integration of Communication and Localization Systems Using IR-UWB Signals. 2021.
LOU, X.; ZHAO, Y., 2019, High-Accuracy Positioning Algorithm Based on UWB. 71-75.
MANZI, G.; FELIZIANI, M.; BEECKMAN, P. A.; DIJK, N. v. Coexistence Between Ultra-Wideband Radio and Narrow-Band Wireless LAN Communication Systems—Part I: Modeling and Measurement of UWB Radio Signals in Frequency and Time. IEEE Transactions on Electromagnetic Compatibility, 51, n. 2, p. 372-381, 2009.
MOHAMMADMORADI, H.; HEYDARIAAN, M.; GNAWALI, O. UWB Physical Layer Adaptation for Best Ranging Performance within Application Constraints. 2018.
MOHAMMADMORADI, H.; HEYDARIAAN, M.; GNAWALI, O., 2019, SRAC: Simultaneous Ranging and Communication in UWB Networks. 9-16.
MOLISCH, A. F. Ultra-Wide-Band Propagation Channels. Proceedings of the IEEE, 97, n. 2, p. 353-371, 2009.
NGUYEN, T.-M.; ZAINI, A. H.; WANG, C.; GUO, K. et al., 2019, Ithaca. Robust Target-relative Localization with Ultra-Wideband Ranging and Communication. Ithaca: Cornell University Library, arXiv.org.
NGUYEN, T. M.; NGUYEN, T. H.; CAO, M.; QIU, Z. et al., 2019, Integrated UWB-Vision Approach for Autonomous Docking of UAVs in GPS-denied Environments. 9603-9609.
PAKISTAN, T. A Report on Ultra Wide Band (UWB) Application Pakistan Telecommunication Authority, 2012.
PASO, T.; NIEMELÄ, V.; HAAPOLA, J.; HÄMÄLÄINEN, M. et al. Performance Evaluation of IEEE 802.15.42011 IR-UWB System with Enhanced Modulation Scheme. 2015.
PASTRAV, A.; SIMEDRONI, R.; PALADE, T.; DOLEA, P. et al., Evaluation of UWB Transmissions in Highly Reflective Environments. IEEE. 527-532.
QUERALTA, J. P. COLLABORATIVE AUTONOMY IN HETEROGENEOUS MULTI-ROBOT SYSTEMS. ANNALES UNIVERSITATIS TURKUENSIS, 2022. doctoral thesis.
QUERALTA, J. P.; ALMANSA, C. M.; SCHIANO, F.; FLOREANO, D. et al., 2020, UWB-based System for UAV Localization in GNSS-Denied Environments: Characterization and Dataset. 4521-4528.
SADOWSKI, S.; SPACHOS, P. RSSI-Based Indoor Localization With the Internet of Things. IEEE Access, 6, p. 30149-30161, 2018.
SARKAR, A.; SULTANA, S. Study on Ultra-Wideband (UWB) System and Its Applications. 01/05 2018.
SEDLACEK, P.; SLANINA, M.; MASEK, P., 2019, An Overview of the IEEE 802.15.4z Standard its Comparison and to the Existing UWB Standards. 1-6.
SHEN, Y., 2022, Applications of UWB Positioning Technology in Smart Home. Atlantis Press. 874-883. Disponível em: https://doi.org/10.2991/978-2-494069-31-2_102.
SHULE, W.; ALMANSA, C. M.; QUERALTA, J. P.; ZOU, Z. et al., 2020, English, UWB-based localization for multi-UAV systems and collaborative heterogeneous multi-robot systems. Elsevier B.V. 357-364. Disponível em: https://www.scopus.com/inward/record.uri?eid=2-s2.085094561516&doi=10.1016%2fj.procs.2020.07.051&partnerID=40&md5=a9558f08ebc2df537090c3a dfb7970ad.
SUN, B.; HUANG, R.; XIA, Y.; SHAO, Z. et al., 2023, Integrated Communication and Localization Design Based on UWB Technology for Underground Substations. 535-540.
SUN, J.; XIE, B.; XIONG, W.; ZHANG, Q. et al. Posture algorithm for mobile robot based on ultrawide band. International Journal of Advanced Robotic Systems, 19, n. 4, 2022.
WU, P. Comparison between the Ultra-wide Band based indoor positioning technology and other technologies. Journal of Physics: Conference Series, 2187, n. 1, p. 012010, 2022/02/01 2022.
XIANJIA, Y.; QINGQING, L.; QUERALTA, J. P.; HEIKKONEN, J. et al., 2021, English, Cooperative UWBbased localization for outdoors positioning and navigation of UAVs aided by ground robots. Institute of Electrical and Electronics Engineers Inc. Disponível em: https://www.scopus.com/inward/record.uri?eid=2-s2.0-85117531280&doi=10.1109%2fICAS49788.2021.9551177&partnerID=40&md5=559feaa5a1f597b57d be04b9769b8b77.
XU, Y.; SHMALIY, Y. S.; AHN, C. K.; SHEN, T. et al. Tightly Coupled Integration of INS and UWB Using Fixed-Lag Extended UFIR Smoothing for Quadrotor Localization. IEEE Internet of Things Journal, 8, n. 3, p. 1716-1727, 2021.
YAN, J.; YANG, C.; FAN, W.; ZHENG, Y. et al. GNSS/UWB integrated positioning with robust Helmert variance component estimation. Advances in Space Research, 73, n. 5, p. 2532-2547, 2024/03/01/ 2024.
YANG, B.; YANG, E. A Survey on Radio Frequency based Precise Localisation Technology for UAV in GPSdenied Environment. Journal of Intelligent & Robotic Systems, 103, n. 3, p. 38, 2021/10/06 2021.
YANG, B.; YANG, E.; YU, L.; LOELIGER, A. High-Precision UWB-Based Localisation for UAV in Extremely Confined Environments. IEEE Sensors Journal, 22, n. 1, p. 1020-1029, 2022.
YANG, J.; LEE, S., 2023, Ultrawideband coupled relative positioning algorithm applicable to flight controller for multidrone collaboration. 758-767. Disponível em: https://www.scopus.com/inward/record.uri?eid=2-s2.0-85175365731&doi=10.4218%2fetrij.20230128&partnerID=40&md5=fc7828aef44f8d98c37317cecd779412.
YU, X.; LI, Q.; JORGE PEÑA, Q.; HEIKKONEN, J. et al., 2021, Ithaca. Applications of UWB Networks and Positioning to Autonomous Robots and Industrial Systems. Ithaca: Cornell University Library, arXiv.org.
ZAFARI, F.; GKELIAS, A.; LEUNG, K. A Survey of Indoor Localization Systems and Technologies. IEEE Communications Surveys & Tutorials, PP, 09/04 2017.
ZHANG, Y.; DONG, L.; LUO, J.; LU, L. et al., 2022, Intelligent Inspection Method of Transmission Line Multi Rotor UAV Based on Lidar Technology. 232-236.
ZHOU, T.; CHENG, Y., 2021, Positioning Algorithm of UWB based on TDOA Technology in Indoor Environment. 261-266.
ZHUANG, Y.; WANG, Q.; SHI, M.; CAO, P. et al. Low-Power Centimeter-Level Localization for Indoor Mobile Robots Based on Ensemble Kalman Smoother Using Received Signal Strength. IEEE Internet of Things Journal, 6, n. 4, p. 6513-6522, 2019.
ZIKRUL HAKIEM, I.; SALLEHUDDIN MOHAMED, H. Indoor Positioning System Based on UWB Rapid Integration with Unity Cross-Platform Development Engine Through IoT. Journal of Artificial Intelligence and Technology, 4, n. 1, p. 74-81, 10/28 2023.