REGISTRO DOI: 10.5281/zenodo.7974374
Alan de Souza Dias
Rafael Silva Teixeira
Raphael Covalciuk de Oliveira
Orientador: Dr. Paulo César da Silva Emanuel
Resumo: A Rede Controller Area Network (CAN) desempenha um papel fundamental na indústria automobilística, oferecendo uma plataforma robusta e confiável para comunicação entre diferentes sistemas eletrônicos presentes nos veículos modernos. Este artigo apresenta um resumo dos avanços e das aplicações da Rede CAN na indústria automobilística propõe o desenvolvimento de um protótipo relacionado a essa tecnologia. Foi discutida a arquitetura e o funcionamento da Rede CAN, destacando sua capacidade de suportar comunicação e possibilidades de uso. A topologia de barramento da rede e o protocolo de comunicação baseado em mensagens são explicados, ressaltando a capacidade de conectar vários subsistemas eletrônicos, como o sistema de controle do motor, sistemas de segurança, entre outros. Além disso, é proposta a elaboração de um protótipo relacionado à Rede CAN. Esse protótipo pode explorar a integração de diferentes componentes e sistemas, utilizando a Rede CAN como meio de comunicação. Por exemplo, temperatura do motor, funcionamento, dos freios ABS, ar condicionado, airbags, e o tempo necessário para que seja realizada a revisão do veículo, podem ser implementados e interconectados através da Rede CAN. A proposta do protótipo visa demonstrar a viabilidade e benefícios da Rede CAN na indústria automobilística. Por fim, é ressaltada a importância contínua da Rede CAN na indústria automobilística, bem como a sua evolução e adaptação às demandas do setor. Através da proposta do protótipo, espera-se contribuir para o avanço tecnológico e o desenvolvimento de veículos mais seguros, eficientes e conectados, aproveitando todo o potencial da Rede CAN.
Palavras-chave: Rede CAN, Protótipo, Indústria automobilística, monitoramento, segurança.
Abstract: The Controller Area Network (CAN) plays a key role in the automotive industry, offering a robust and reliable platform for communication between different electronic systems present in modern vehicles. This paper presents an overview of the advances and applications of the CAN Network in the automotive industry and proposes the development of a prototype related to this technology. The architecture and operation of the CAN Network was discussed, highlighting its ability to support communication and possibilities of use. The network bus topology and the message-based communication protocol are explained, highlighting the ability to connect various electronic subsystems, such as the engine control system, safety systems, among others. Furthermore, the development of a prototype related to the CAN Network is proposed. This prototype CAN explore the integration of different components and systems, using the CAN Network as a communication medium. For example, engine temperature, ABS brakes operation, air conditioning, air bags, and the time required for the vehicle overhaul CAN be implemented and interconnected through the CAN Network. The prototype proposal aims to demonstrate the feasibility and benefits of the CAN Network in the automotive industry. Finally, the continuing importance of the CAN Network in the automotive industry is emphasized, as well as its evolution and adaptation to the demands of the industry. Through the prototype proposal, it is expected to contribute to technological advancement and the development of safer, more efficient and connected vehicles, taking advantage of the full potential of the CAN Network.
Keywords: CAN Network, Prototype, Automotive Industry, Monitoring, Safety.
1. Introdução
A rede CAN (Controller Area Network), foi um modelo de comunicação proposto inicialmente por Robert Bosch, com o intuito de realizar a comunicação entre os controladores dos componentes de veículos automotivos.
Desde 1886, quando se teve conhecimento do surgimento do primeiro veículo com motor a combustão registrado por Karl Benz, inúmeras tecnologias, como sistemas de monitoramento do motor, sistemas de iluminação, e GPS, vêm sendo desenvolvidas e empregadas nos automóveis ao longo dos anos, visando um proporcionar ao cliente, maior conforto, redução de custos e segurança. Tal desenvolvimento tecnológico transformou o que antes era apenas uma máquina com motor a combustão em uma robusta máquina com componentes que visam sempre proporcionar a segurança do condutor do veículo.
Segundo o departamento nacional de trânsito (DENATRAN, 2018) havia no Brasil cerca de 53 milhões de veículos em circulação. Em 2021, de acordo com o instituto brasileiro de geografia e estatística (IBGE, 2018), havia cerca de 111 milhões de veículos em circulação em todo território brasileiro. Com o crescimento em massa da frota de veículos, há uma busca incessante das montadoras para desenvolver novas tecnologias que permitam o cliente ter um maior gerenciamento de seu veículo.
Visando esse melhor gerenciamento, o avanço tecnológico nos sistemas eletrônicos e computacionais de um veículo tem como principal finalidade trazer ao usuário essa segurança e um melhor conforto, para proporcionar a confiança de estar conduzindo um veículo seguro.
Desde sua primeira aparição, até meados dos 70, as tecnologias automotivas, desenvolvidas na época, eram direcionadas ao sistema mecânico do veículo, como motor, freio ABS, vidros elétricos e a própria chave de ignição que aciona a rotação para dar partida aos motores da época (GALASSI, 2022). A partir dos anos 2000, o avanço na área tecnológica deu um salto enorme, o que afetou também a área automobilística, com o surgimento dos painéis digitais, ignição sem chaves, bluetooth, reconhecimento de voz, os famosos assistente de estacionamento, que teve seu início com apenas um sensor sonoro avisa o condutor a proximidade do veículo com um objeto, tamanho avanço ocorreu, nos proporcionando veículos que estacionam sozinhos.
Todo esse avanço tecnológico presente nos veículos atualmente, é possível devido ao um conjunto de componentes e controladores de componentes que se comunicam entre si, enviando, recebendo e atualizando constantemente o computador de bordo presente nos veículos através de um mesmo protocolo de comunicação, sendo deles o mais utilizado a rede CAN dentro da área automobilística.
Tendo isso em vista, o presente trabalho sobre a rede CAN, visa o estudo sobre esse protocolo de comunicação no meio automotivo, demonstrando seus pontos fortes, evidenciando as mudanças tecnológicas que ocorrem no decorrer dos anos após o seu desenvolvimento, e através de um protótipo, exemplificar o funcionamento de uma rede CAN em um veículo automotivo.
1.1 Justificativa
Atualmente no mercado há uma disponibilidade pequena de dispositivos que fornecem ao usuário informações essenciais a respeito do seu veículo, como, temperatura do motor, funcionamento, dos freios ABS, ar condicionado, airbags, e o tempo necessário para que seja realizada a revisão do veículo. O fator segurança, é primordial quando pensamos em adquirir um veículo, e o desenvolvimento de um sistema, que utilize um protocolo de comunicação que permita ao usuário ter conhecimento a respeito dessas informações sobre o seu veículo, traria ao cliente, segurança e a redução de gastos do usuário e até mesmo das montadoras.
Segundo levantamento realizado pela polícia rodoviária federal, foram contabilizadas mais de 12 mil colisões no ano por defeitos mecânicos e a ausência de manutenção preventiva nos veículos. (ANDRADE, L. 2017). De acordo com Elias Mufarej, conselheiro da indústria nacional de componentes para veículos automotores, entrevistado por ANDRADE, L. 2017, uma das principais causas desse grande número de colisões, é o envelhecimento da frota de automóveis, que ultrapassam os 11 anos.
Tendo isso em vista, o projeto a respeito da rede CAN, visa justamente, entender o funcionamento desse protocolo e sua comunicação entre os componentes do veículo, demonstrar a eficácia da rede CAN como uma forma de prevenção, e segurança do usuário, alertando-o sobre possíveis falhas no motor, sistemas de frenagem e quilometragem necessária para a realização de uma revisão preventiva do veículo.
Contudo, a rede CAN mesmo sendo a mais utilizada vem levantando questionamentos a respeito de sua segurança. Com o avanço tecnológico, os carros atualmente vêm sendo fabricados cada vez mais com componentes e acessórios multimídia. O fato de a rede CAN ter uma característica de broadcast vem causando preocupação entre os usuários e as montadoras por conta de permitir através das ECUs um fácil acesso a todas as informações presentes no barramento do veículo.
Seria viável a longo prazo estudar a fundo a vulnerabilidade de segurança que se tem presente no protocolo CAN com a finalidade de se minimizar a possibilidade de invasão ao barramento do veículo trazendo segurança ao usuário e a própria montadora do automóvel.
1.2 Objetivos (Geral e específicos)
Geral
Realizar uma revisão bibliográfica sobre a tecnologia e protocolo de comunicação CAN, e sua a evolução na indústria automobilística, demonstrando seu funcionamento através da proposta de um protótipo.
Específicos
a) Realizar um estudo a respeito da rede CAN, entendendo seu funcionamento, e sua eficácia na área automobilística;
b) Apresentar as mudanças ocorridas após o desenvolvimento da rede CAN no campo automotivo;
c) Propor a montagem de um protótipo baseado nas informações levantadas.
2. Revisão Bibliográfica
A utilização da rede CAN teve início em meados dos anos 80, na empresa alemã Bosch devido a necessidade de se reduzir e simplificar todo o cabeamento utilizado nos automóveis na época, ao mesmo tempo que se melhorava a comunicação entre as centrais eletrônicas que eram implantadas nos carros. (GALASSI, 2022).
Partindo desse ponto começou – se a desenvolver os primeiros os primeiros chips controladores CAN, tendo como primeiro modelo o CAN 82526 (TIRONI, et al. 2018). Desde a primeira produção do chip CAN nos 80, empresas como INTEL e PHILIPS começaram a desenvolver e aprimorar os chips para que fossem utilizados nas centrais eletrônicas, somente em 1991 foi constatado o primeiro veículo utilizando o barramento CAN, implantado pela empresa Mercedes em seu veículo SW140 (TIRONI, et al. 2018).
Os veículos que vemos hoje em dia são resultado de anos de desenvolvimento tecnológico na área automobilística. Atualmente os carros estão sendo equipados com dispositivos eletrônicos onde todos eles utilizam a rede CAN como meio de comunicação entre as centrais eletrônicas do veículo, porém a rede CAN apresenta também suas vulnerabilidades que vêm sendo discutidas pelos usuários e as montadoras de veículos. Pelo fato da rede CAN ter uma característica de broadcast, torna-se acessível que qualquer ECU através de um único ponto de acesso, o invasor possa ter acesso a todas as informações que estão presentes no barramento do veículo.
É comprovada a eficácia da rede CAN aos longos dos anos como protocolo de comunicação mais utilizado nos veículos automotivos, seu desenvolvimento aos longos dos anos permitiu uma maior robustez e tempo de comunicação mais veloz e eficaz entre as centrais do automóvel.
2.1. Arquitetura Centralizada
A arquitetura centralizada, atualmente, é a mais utilizada ao redor do mundo (MUÑOZ, 1998) e possui inúmeros sistemas funcionando nos mais diversos campos envolvendo o monitoramento de diversos componentes, entre eles, estão os automotivos.
Sistemas que utilizam arquitetura centralizada baseiam-se no modelo cliente/servidor como mostrado na figura abaixo. Onde o usuário faz as requisições de informação para o servidor, e recebe esse retorno, vale notar que nessa arquitetura os clientes não tratam a informação de forma individual, todas as requisições são passadas primeiramente pelo servidor.
Figura 1: Arquitetura centralizada.
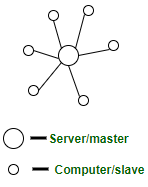
Fonte: (SOUZA & CAMPOS. 2017)
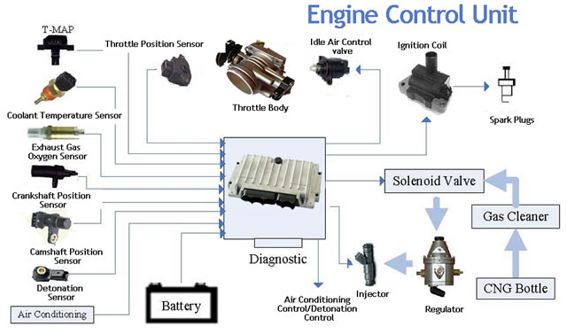
De acordo com (PEREIRA & ZEFERINO. 2008), dentro da área automotiva, o conceito de arquitetura centralizada permanece o mesmo. Em um veículo, os componentes, e sensores do automóvel estão conectados a ECUs (Eletronic Control Units). ECU é um sistema computacional dedicado que controla um ou mais subsistemas do veículo.
Seguindo então o conceito inicial da arquitetura centralizada, prevê-se que em um automóvel utilizando sistema centralizado, tenha uma única ECU que receba as informações de todos os sensores e componentes, ou seja, as entradas, e acione os atuadores (saídas) conforme a figura 2.
Figura 2: Arquitetura centralizada automotiva.
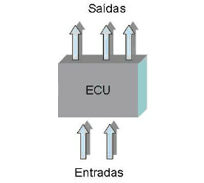
Fonte: (SOUZA & CAMPOS. 2017)
A principal vantagem no uso de uma arquitetura centralizada está na sua simplicidade em ser implementada, tendo em vista que se necessita apenas de seus sensores e atuadores, (Entrada e Saída respectivamente), uma ECU para o controle do sistema, e o cabeamento necessário para conectá-los. Outra vantagem seria o fato de todas as informações ficarem armazenadas em uma única ECU, não é necessário realizar uma varredura em cada componente para ter acesso a essas informações.
Em suas desvantagens, podemos citar a grande quantidade de cabeamento que se necessita para ligar os componentes à ECU, especialmente em grandes sistemas como o automotivo, o que dificulta a sua manutenção.
2.2. Arquitetura Descentralizada
Em contrapartida, a arquitetura descentralizada vem ganhando popularidade entre os sistemas de monitoramento, incluindo o meio automotivo. Como pode-se observar na figura 3, o modelo de arquitetura descentralizada ou distribuída, funciona de forma independente.
Figura 3: Arquitetura descentralizada
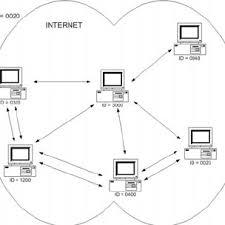
Fonte: (SOUZA & CAMPOS. 2017)
Segundo (PEREIRA & ZEFERINO. 2008), a arquitetura descentralizada é constituída por múltiplos ECUs, onde cada é responsável por um subconjunto dos componentes e atuadores do veículo e se comunicam através de um protocolo de comunicação.
Figura 4:Arquitetura descentralizada automotiva
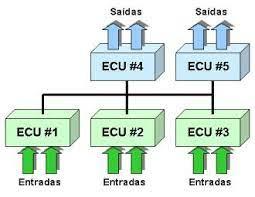
Fonte: (SOUZA & CAMPOS. 2017)
Dentre a série de vantagens da arquitetura descentralizada estão: redução do cabeamento, levando em consideração que se tem diversas ECUs disponíveis a instalação dos sensores e atuadores pode ser feita de forma mais próxima as ECUs, formando basicamente pares de cabeamentos e ligamento em rede (CAN). Redução da dificuldade de expansão do sistema e de sua manutenção.
2.3. ECUs
ECUs (Electronic Control Unit,ou Engine Control Unit), popularmente traduzido para “Centralina”, são centrais de controle dos carros, e são responsáveis pela comunicação entre os transdutores de entrada e saída que compõem o veículo. Pode-se dizer que as ECUs são o cérebro do veículo.
As ECUs (Engine Control Unit) foram introduzidas nos primeiros sistemas relacionados à injeção eletrônica com o intuito de realizar o gerenciamento do motor do veículo, para calcular e fornecer informações como: tempo de ignição do motor, nível de combustível, quantidade aproximada de ar que está entrando pela borboleta. Possibilitando assim ao receber esses sinais de entrada, e baseando-se em seus valores, enviar um sinal para que se abra a válvulas injetoras de combustível no momento e quantidade necessários (CONTESINI, 2017). As ECUs também possuem uma memória RAM (Random Access Memory) que grava possíveis erros em formato de código, e que podem ser acessados com um aparelho de diagnóstico automotivo.
(CONTESINI, 2017) com o avanço da tecnologia ao decorrer dos anos, foi permitido um grande avanço no processamento de dados, que, por sua vez, possibilitou que fossem criados novos sistemas de gerenciamento, não apenas do motor, mas de vários outros sistemas do carro: velocímetro, sistemas ABS, conta-giros.
A ECU trabalha de acordo com três etapas, são elas: Coleta de dados, processamento e atuação (CONTESINI, 2017). A coleta de dados se dá através de sinais analógicos emitidos pelos sensores que variam de 0 a 5 volts. Vale lembrar que a ECU interpreta exclusivamente sinais digitais, tornando-se então necessário um conversor analógico – digital para que a informação seja traduzida e interpretada pela ECU. Feita a tradução do sinal, a ECU então processa e calcula os sinais de saída que são seguidamente enviados aos atuadores para o controle do motor ou de outro sistema ao qual ECU pertença.
Figura 5: ECU
Fonte: (RAJAGOPAL, 2018)
Apesar de os dados fornecidos pela ECU serem referenciais, ela nem sempre receberá os valores de entrada previstos. Quando ocorre uma falha ou mau funcionamento de algum sensor, o controlador conta com uma segurança que irá permitir que o veículo continue o seu funcionamento, aderindo a um sinal pré-estabelecido e passando a “ignorar” os sinais provenientes do sensor com defeito.
Segundo (BROWN, 2017), as ECUs no meio automotivo são subdivididas em módulos, podendo haver em um único carro moderno cerca de 100 ECUs. Sendo elas as mais usuais:
a) PCM (Powertrain Control Module): Módulo de Controle do Trem de Força;
b) TCM (Transmission Control Module): Módulo de Controle de Transmissão;
c) ECM (Engine Control Module): Módulo de Controle do Motor.
2.4. CAN – Controller Area Network
De acordo com (PEREIRA & ZEFERINO. 2008), o desenvolvimento do protocolo CAN foi motivado pelo fato de que os protocolos desenvolvidos até os anos 80 não atendiam a todos os requisitos de precisão de informação que os engenheiros da época necessitavam. Seu objetivo inicial era fornecer uma melhoria nas redes de comunicação dos automóveis junto a um baixo custo de implementação para as montadoras. Atualmente a rede CAN é utilizada em diversas outras áreas além da automotiva como, indústrias, sistemas de gerenciamento, dispositivos hospitalares e até sistemas voltados ao agronegócio.
O protocolo CAN é um barramento digital, e foi desenvolvido para operar entre 20 Kbit/s até 1 Mbit/s (NATALE, 2012). Sua velocidade de operação foi padronizada pela ISO11898 para velocidades altas (500 Kbit/s) e pela ISSO 11519-2 para as aplicações que utilizam velocidade até 125 kbit/s. A estrutura envolvida no barramento da rede CAN tem como referência o ISO-OSI. O modelo OSI visa estruturar as comunicações de um sistema e seus componentes de forma hierárquica, dividindo essa comunicação de dados em 7 camadas.
A Camada Física, conhecida como a primeira camada do modelo OSI, possui o objetivo de garantir uma comunicação eficaz e segura entre os componentes do sistema. É responsável por definir os padrões elétricos de transmissão, tais como os procedimentos para o seu funcionamento. Seu segundo nível, conhecido como Camada de enlace ou ligação, é a camada onde ocorre o controle de erros e envio dos pacotes de dados, essa camada é responsável por verificar os pacotes enviados, detectando erros, para que possam ser corrigidos antes de serem enviados às próximas camadas.
A camada de Rede, terceira camada do modelo OSI, é responsável por estabelecer a conexão entre os computadores em rede, distribuindo as informações da origem até a máquina de destino. Logo após a camada de rede, temos a camada de transporte, a quarta camada. É a camada responsável pelo envio e recebimento dos pacotes que vieram da terceira camada, para isso realiza a comunicação peer – to – peer (Ponto – a – Ponto) que assegura a entrega dos pacotes.
Acima da camada de transporte, temos o nível 5 do modelo OSI, a Camada de Sessão, é a camada responsável por estabelecer os canais de comunicação entre os dispositivos. Seguido da camada 6, temos a Camada de Apresentação, nessa camada é feita a conversão dos dados recebidos, dos códigos e realizada a sua criptografia para que todos os elementos conectados a rede possam ler a mesma informação. Por último, temos a Camada de Aplicação, é a camada que interage diretamente com o usuário, agindo como uma interface e administrando a transmissão das informações. É também a camada onde ocorre a emulação dos terminais.
Figura 6: OSI

FONTE: (KOLB, 2016)
O barramento CAN utiliza apenas duas camadas do modelo ISO-OSI, camada física e camada de enlace.
Integrada a rede CAN, a camada física é responsável por realizar a codificação, decodificação dos bits, a temporização e a sincronização do sinal recebido. A camada física também é responsável por definir as principais características das conexões em rede.
A camada de enlace dentro da rede CAN subdivide-se em duas camadas, LLC e MAC:
- A camada LLC, é responsável por realizar a filtragem das mensagens que são enviadas pelos componentes, além de notificarem uma possível sobrecarga operacional e o controle de operação;
- A camada MAC, tem como função a realização do encapsulamento dos dados, a detecção e a sinalização de possíveis erros na rede.
Existem 03 formas de se montar um barramento CAN, e essas formas variam de acordo com quantidade de fio que se utiliza, variando entre 1,2 e 4 fios respectivamente.
Aos barramentos que se utilizam apenas um fio, todos os dados são transmitidos por esse mesmo fio, a exemplo de uma via única denominada via CAN. Barramentos que fazem o uso de 2 ou 4 fios, utilizam sinais CAN high e CAN low. Especialmente os barramentos que se utilizam de 4 fios, além dos cabos de dados, possuem também um fio VCC (responsável pela alimentação do barramento) e um fio GND (responsável pela referência do barramento).
Segundo (GUIMARAES & SARAIVA, 2002), quando consideramos o barramento CAN baseado em 2 e 4 fios, os condutores elétricos que os compõem devem ser trançados, e os dados que são enviados via rede são interpretados através de uma análise de diferença de potencial que ocorre entre os fios CAN high (CAN_H) e CAN low (CAN_L), o que caracteriza o barramento CAN como um par trançado diferencial.
Figura 7: CAN_H, CAN_L.
FONTE: (GUIMARAES & SARAIVA, 2002).
2.4.1 CAN high speed
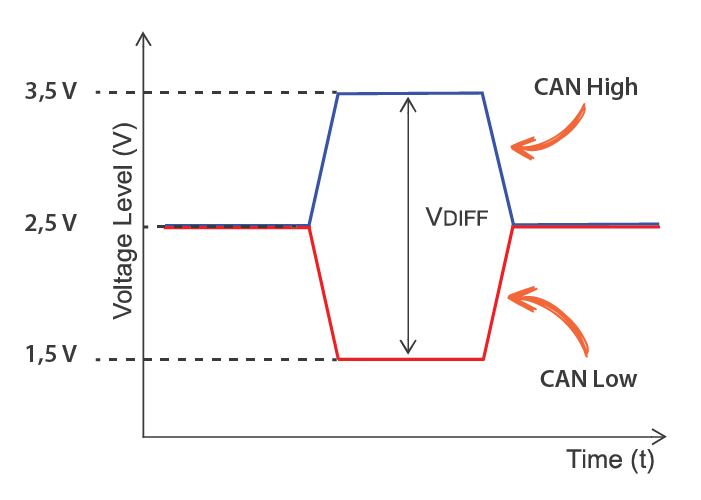
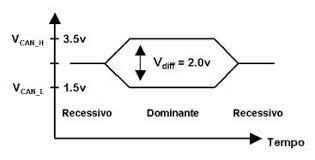
No barramento CAN, a transmissão de dados é representada em dois estados, o dominante e recessivo. A tensão utilizada é de 2,5V para o bit recessivo, sendo o mesmo para CAN high e CAN low, fazendo com que a diferença de tensão no barramento seja igual a 0V. Já para o bit dominante, temos uma tensão elétrica de 3,5V para CAN high e 1,5V para CAN low, tornando a diferença de potencial em 2V.
De acordo com (NASCIMENTO, et al. 2019), os fios que compõem o barramento possuem até 40m de comprimento, e funcionam a uma taxa de até 1Mbps, e acompanhado de um resistor de 120 Ohms. Podem ser conectados cerca de 30 nós com drivers CAN simultaneamente.
Figura 8: Dominante e Recessivo
Fonte: (NASCIMENTO, et al. 2019).
2.4.2 CAN low speed
No barramento CAN low speed, as linhas do barramento atingem uma velocidade de até 150 Kbps, devido a esse limite de transmissão, o sistema torna-se imune a interferências, descartando o uso de resistores. (NASCIMENTO, et al. 2019)
Dentro do barramento, um bit considerado recessivo é representado por CAN_H a uma tensão de 1,75V e CAN_L a 3,25V, resultando em uma diferença de potência para um bit dominante de 1,5V
Um bit de característica dominante é representado por CAN_H a uma tensão de 4,0V e CAN_L em aproximadamente 1,0V, o que resulta em uma diferença de potencial para um bit dominante de 3,0V.
2.5 Rede CAN
Em 2003, através da norma ISO-11898, a rede CAN passou a ser qualificada como uma rede prioritária de transferência de dados. (CAVALCANTE, 2018), Fazendo uso do protocolo CSMA/CD, os módulos analisam o estado de funcionamento uns dos outros, para que seja possível detectar qual dos módulos está enviando e recebendo dados de maior prioridade. Feita essa análise, a transmissão que possui menor prioridade em transferência de dados é automaticamente encerrada, para que se dê preferência ao envio de dados de maior prioridade dentro da rede.
Dentro de uma rede CAN, todos os dados são transmitidos em série, ou seja, um bit de cada vez, fazendo com que ela seja caracterizada como uma comunicação séria. Como a transmissão de dados se dá de forma contínua na rede CAN, não ocorrendo intervalo entre os bits, o módulo emissor da mensagem e seu receptor estão sempre em sincronia, pois os dados estão sempre sendo transmitidos em um intervalo de tempo regular.
O protocolo de comunicação CAN nos fornece a possibilidade de trabalhar com dois formatos diferentes desse protocolo, o CAN 2.0A, conhecido como o formato padrão do protocolo, e o CAN 2.0B.
No protocolo CAN 2.0A, temos a transmissão de mensagens com um identificador no valor de 11 bits, o que possibilita termos até 2048 mensagens em uma rede que se utiliza desse formato, que dependendo de sua aplicação podem ocorrer certas limitações.
Diferentemente do formato CAN 2.0A, o CAN 2.0B, possui uma maior quantidade de bits em seus identificadores de mensagens, chegando a 29 bits, possibilitando termos uma margem de aproximadamente 537 milhões de mensagens em uma rede que se utilize desse formato, anulando as limitações de mensagens que ocorrem nas aplicações que fazem o uso do formato CAN 2.0A, porém com um aumento significativo na quantidade de bits que a CAN 2.0B possui, há também um aumento no tempo de envio e recebimento das mensagens, podendo ser um formato limitante em aplicações que façam uso de transmissões em tempo – real.
2.5.1 Frames Rede CAN
De acordo com (NATALE, 2012), o protocolo CAN possui quatro tipos de frames de mensagens em sua composição: Data frame, Remote frame, Error frame, Overload frame.
2.5.1.1 CAN Data frame
Segundo (COOK & FREUDENBERG, 2008), o CAN Data frame, é composto por sete campos: SOF (start of frame), identificador, RTR (Remote Transmission Quest), Dados, CRC (Cyclic Redundancy Check), ACK (Acknowledge) e EOF (End of Frame).
a) SOF (Start of Frame) é o bit inicial que identifica o início de uma mensagem enviada, responsável também por realizar a sincronização de todos os módulos conectados ao barramento;
b) Identificador é o responsável pela quantidade de bits (no formato CAN 2.0A sendo 11 bits, e no formato CAN 2.0B sendo 29 bits) e definem a prioridade das mensagens enviadas e recebidas;
c) RTR (Remote Transmission Quest), como o nome já diz, é o bit responsável por fazer a requisição de transmissão remota;
d) Dados, são caracterizados por terem até 8 bytes ou 64 bits, que carregam a informação.
e) CRC (Cyclic Redudancy Check) é formato de campo composto por 16 bits que são responsáveis por realizar a detecção de erros;
f) ACK (Acknowledge) é um campo composto por 2 bits de dados, sendo 1 bit dominante e outro recessivo, são responsáveis por fazer a confirmação de que a mensagem foi recebida corretamente pelo nó ao qual a mensagem foi destinada;
g) EOF (End of Frame) composto por 7 bits que indicam o fim da mensagem transmitida pelo barramento.
2.5.1.2 CAN Error frame
(COOK & FREUDENBERG, 2008) caso um determinado nó do barramento, seja ele transmissor ou receptor, detectar um erro na transmissão da mensagem, a transmissão dessa mensagem é interrompida, o quadro de erro consiste em um sinalizador composto de seis bits dominantes e um delimitador de erro composto por 8 bits recessivos, tendo em vista que essa sequência infringe a regra de preenchimento dos bits, todos os outros nós começam a enviar mensagens de erro sinalizadoras de erro. Quando uma determinada quantidade de erros forem detectados, o nó será automaticamente desligado, interrompendo seu mau funcionamento.
2.5.1.3 CAN Remote frame
É o frame que possui a finalidade de fazer uma requisição de informação entre nós. Podemos citar como exemplo automotivo, um microprocessador responsável por controlar o travamento do carro, pode fazer uma requisição ao um determinado nó para saber o estado da marcha do carro, se o carro está em marcha neutra por exemplo.
2.5.1.4 CAN Overload Frame
Caso ocorra a situação de um nó no barramento receber uma informação mais rápida do que ele consiga processar, o Overload frame é responsável por garantir esse tempo para o processamento das informações.
3. Metodologia
3.1. Planejamento do Circuito do protótipo
Para a realização de um protótipo deve ser planejado o circuito do projeto, idealizado e especificando os componentes a serem utilizados, mensurando os módulos e realizando testes de aplicação para o melhor desenvolvimento do protótipo almejado. Contendo nele informações base de componentes e especificações do circuito, tais como:
a) Conversores de tensão DC-DC;
b) Microcontrolador;
c) Display;
d) Transceiver CAN;
e) Emulador OBD-II;
f) Módulo de Barramento CAN;
g) Proteção nos módulos contra Subtensão e Sobretensão;
h) Alimentação correta em cada componente do circuito;
i) O uso correto da polaridade de cada componente do circuito;
j) Uso correto de conectores;
k) Todo o módulo alimentado em 12V;
l) Toda comunicação via Rede CAN.
3.2. Especificação de componentes possíveis a serem utilizados
Todos os componentes e o circuito em si devem ser planejados para o uso contínuo no ramo automotivo e estar preparado para receber adversidades naturais, sendo elas, por exemplo:
a) Alta temperatura do ambiente e do automóvel;
b) Alta taxa de umidade do ambiente e do automóvel;
c) Uso elevado dos componentes em situações adversas;
d) Resíduos, como poeira, lama, óleo, entre outros.
Figura 9 – Esquema do Protótipo Final
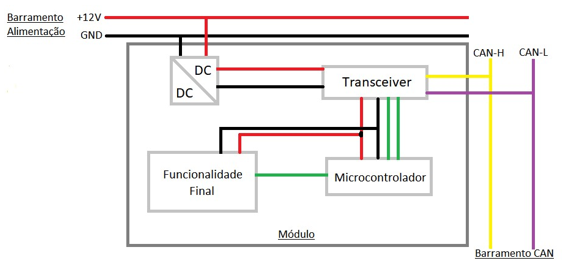
Fonte: (Autoria própria)
3.3. Conversor DC-DC
Para a operação do circuito, o conversor de tensão analisado e escolhido como o componente mais apropriado para a tarefa seria o LT3682 do tipo Buck por ser um conversor voltado para o setor do ramo automotivo e tendo excelentes características, sendo algumas delas:
a) Melhor custo-benefício do mercado;
b) Faixa de operação de 3.6V até 36V;
c) Faixa de operação de temperatura de -40°C até 125°C.
Figura 10 – Conversor LT3682
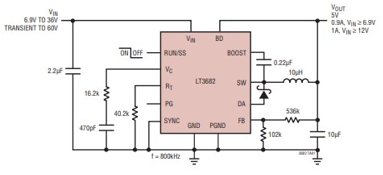
Fonte: (LINEAR TECHNOLOGY, 2008)
3.4. Microcontrolador
Já o microcontrolador irá realizar todo o processamento de dados e trocas de informações com os sensores via rede CAN. Por sua vez um microcontrolador que pode ser escolhido é o PIC18F4580, pelas principais características, sendo elas:
a) Faixa de operação de temperatura de -40°C até 125°C;
b) Possui 11 conversores A/D de 10-bit;
c) Possui comunicação CAN;
d) Faixa de operação em até 40MHz.
Por sua vez, o microcontrolador precisa de circuitos auxiliares para melhor execução, sendo eles: Circuito De reset, oscilador e de filtros de tensão.
O circuito de reset é um circuito de precaução pois o não uso dele não afeta no projeto, porém com a sua utilização em casos de erros, pode ser acionado e reiniciado o microcontrolador. Desta forma pode ser aproveitado o pino 1 do microcontrolador pelo fato de ter como função ser o master clear (reset). Já o oscilador gera o clock do sistema, atuando no tráfego de dados. Podendo ser utilizado dois capacitores cerâmicos de 15pF e um cristal oscilador de 20MHz. E por fim o circuito de filtros de tensão, como o próprio nome já indica, tem como intuito diminuir a variação de tensão do circuito. Sendo ele composto por dois capacitores de 20nF.
Porém para uma utilização mais prática para uma possível montagem de protótipo o microcontrolador ATMEGA328p, é um microcontrolador mais barato e simples e integra a plataforma do Arduino UNO®.
O Arduino oferece ao seu usuário diversas bibliotecas escritas para diferentes funcionalidades, desta forma, facilitando ainda mais na construção de um possível protótipo.
Figura 11 – Microcontrolador ATMEGA328p
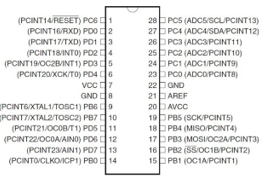
Fonte: (ATMEL, 2015)
3.5. Transceiver
O transceiver será o componente que irá converter os bits mandados pelo microcontrolador em um sinal para o barramento e o inverso desse caminho também. Para uma boa funcionalidade da comunicação CAN, foi escolhido o MCP2551, tendo as seguintes características:
a) Faixa de operação de temperatura de -40°C até 85°C;
b) Suporta taxa de execução de 1MB/s;
c) Até 112 pontos podem ser conectados;
d) O ponto não alimentado não afetará a Rede CAN.
Figura 12 – Transceiver MCP2551
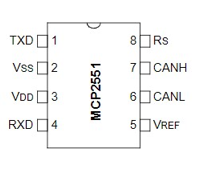
Fonte: (MICROCHIP, 2002)
3.6. Módulo de Barramento CAN
A função do barramento CAN seria decodificar os sinais enviados pelo Transceptor (transceiver). Sendo assim o escolhido foi o MCP2515, pelas suas características, sendo elas:
a) Faixa de operação de 2,7V a 5,5V;
b) Faixa de operação de temperatura -40°C até +125°C;
c) Modo One-Shot, sendo ele garantindo que a transmissão da mensagem seja realizada apenas uma vez.
d) Desta forma ele se comunica com os modelos via SPI (Serial Peripheral Interface) podendo atingir uma frequência de até 10MHz.
Figura 13 – CAN Controller MCP2515
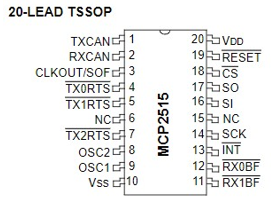
Fonte: (MICROCHIP, 2002)
3.7. Emulador OBD-II
Para a realização de um protótipo de forma mais simples e precisa, pode ser usado o Emulador OBD-II, pois com ele é capaz de definir alguns parâmetros de um carro real, como por exemplo, velocidade do carro, temperatura do motor, entre outros. Toda essa parte de simulação pode ser realizada pelo próprio software do Emulador chamado Freematics OBD-II Emulator GUI.
Porém a utilização desse Emulador OBD-II deixa a construção do protótipo um pouco mais complicada pelo fato de que precisaria de uma conexão entre a porta OBD-II e o hardware embarcado.
Para fins mais técnicos podem ser usados dois simples sensores para efeito de análise, sendo eles, um sensor de temperatura e um outro de velocidade, desta forma segue respectivamente suas definições e modelo a ser utilizado.
Figura 14 – Emulator OBD – II

Fonte: Freematics.
3.8. Sensor de Temperatura
O sensor de temperatura escolhido foi o MTE4053, de linha automotiva cujo seu uso serve para realizar a medição da temperatura do motor. Suas definições são:
a) Faixa de operação de temperatura de -40°C até 125°C;
b) Sensor do tipo NTC (Negative Temperature Coefficient);
O funcionamento desse sensor é baseado na sua queda progressiva da sua resistência, ou seja, quanto maior sua resistência menor a temperatura e quanto menor sua resistência, maior seria a temperatura.
Figura 15 – MTE – THOMSON 4053

Fonte: Loja MTE-THOMSON
3.9. Sensor de Velocidade
O sensor de velocidade escolhido foi o sensor MTE-THOMSON – 73032, de linha automotiva, que tem como função informar o parâmetro da velocidade ao ECM. Seu funcionamento por si só é bem simples, se o veículo exerce uma movimentação baixa, o sensor emite um sinal de baixa frequência ao ECM, caso o veículo exerça uma movimentação mais rápida o sinal da sua onda de frequência vai aumentando relativamente.
Figura 16 – MTE – THOMSON 73032

Fonte: : Loja MTE-THOMSON
3.10. Software
Com a parte de hardware já definida com seus respectivos componentes a serem utilizados em um protótipo, é hora de partir para a elaboração do software realizando a junção com o hardware e dando funcionalidade ao protótipo de Rede CAN. Nesse caso em específico a fins de explicação vamos atribuir ao software a aquisição de dados do hardware sendo eles: Sensor de Temperatura e Sensor de Velocidade.
Para realizar essas duas medições de hardware foi pesquisado formas simples e precisas, tendo como objetivo levar o valor correto e a experiência de um automóvel real. Desta forma, foi encontrado o Emulador LabView.
O LabView é um software construído para realizar aplicações de medições e controle, com o intuído de criar análises de testes a partir de dados propostos, facilitando o entendimento da função de determinado hardware. Sendo assim, o LabView trabalha em paralelo com a Rede CAN sem causar nenhum problema, apenas tendo que se atentar ao fato de que os dados enviados via CAN são de 8 bits e do tipo inteiro, sendo necessário realizar uma conversão.
Porém, se for o caso ou até mesmo do próprio interesse, pode se realizar o próprio software, atribuindo valores e medições próprias de melhor escolha. Pelo fato do microcontrolador usado nesse artigo base, sendo ele: ATMEGA328p, ser de prototipagem do Arduino, ele contém suas bibliotecas abertas com diversos códigos acessíveis, podendo assim contribuir em uma montagem mais segura e precisa de um software de própria autoria.
Desta forma com a intenção de trazer uma melhor experiência ao usuário final com o sistema de monitoramento, pode ser realizado um aplicativo com o sistema Android por exemplo. Com isso o usuário final poderia conectar via Bluetooth e ter de fácil acesso requisições de dados, monitoramento do sistema, análise de falhas e supostas resoluções, trazendo assim uma completa e ampla experiência real do protótipo.
Diversas maneiras são aceitas ao protótipo basta analisar qual e porque se encaixa melhor na maneira de aprendizado e qual a mensagem final que busca entregar com o intuído de melhor experiência e aprendizado ao usuário do protótipo.
4.Resultados e Discussão
Após realizar uma análise e proposição sobre o desenvolvimento de um protótipo de comunicação de Rede CAN neste artigo, os resultados e discussões podem revelar algumas considerações importantes. Inicialmente, foi possível definir o melhor hardware a ser utilizado, bem como justificar a escolha com base nos estudos de caso realizados.
O Conversor DC-DC LT3682 foi selecionado para realizar o remanejamento da tensão contínua no circuito. O Transceiver MCP2551 desempenha a função de converter os bits enviados pelo microcontrolador para o barramento CAN MCP2515, decodificando os sinais e realizando o processo inverso.
O microcontrolador ATMEGA328p possui uma função crucial no protótipo, que é o processamento de dados e a troca de informações. Ele envia comandos de ação, parametriza valores e recebe dados para dar continuidade às ações do circuito.
Em relação aos resultados que podem ser obtidos com a criação do protótipo, duas abordagens podem ser consideradas. A primeira delas é o uso de um emulador, como o emulador OBD-II. Esse software reproduz funções de um ambiente automotivo, permitindo configurar parâmetros de um automóvel real, como temperatura do motor e do arrefecimento. O uso do emulador dispensa a necessidade de criar um software próprio para acompanhar esses valores.
A segunda abordagem é a criação de um software personalizado. Após o estudo de caso e a criação de um fluxograma, os componentes foram selecionados, incluindo sensores de temperatura do motor e de velocidade. Com base na taxa de operação de cada componente e em seu funcionamento, a ideia do software pode ser desenvolvida, envolvendo a configuração de valores mínimos, máximos e a atribuição de codificações, como a velocidade média do automóvel.
O trabalho demonstrou que a comunicação na Rede CAN abrange um amplo campo de atuação. Ao entender a finalidade do projeto, selecionar os componentes adequados, configurar os valores corretamente e decidir sobre o uso ou não de um emulador, foi possível obter um esquema de montagem de um protótipo funcional e de alta qualidade. Esse resultado reflete o conhecimento adquirido por meio de pesquisas e estudos realizados.
5.Considerações Finais/Conclusões
Este artigo científico apresentou uma revisão bibliográfica abrangente sobre a Rede Controller Area Network (CAN) na indústria automobilística, com foco em seu uso em sistemas de segurança veicular, além de propor o desenvolvimento de um protótipo relacionado a esse tema.
Através da revisão bibliográfica, foi possível compreender a importância da Rede CAN como uma plataforma confiável para a comunicação entre os sistemas eletrônicos presentes nos veículos modernos. A arquitetura e o protocolo de comunicação baseado em mensagens da Rede CAN oferecem alta velocidade, baixo consumo de energia e tolerância a falhas, possibilitando a conexão e coordenação eficiente de vários subsistemas.
No contexto dos sistemas de segurança veicular, a Rede CAN desempenha um papel crucial ao permitir a comunicação entre componentes como sensores, atuadores e unidades de controle. Essa comunicação em tempo real possibilita a implementação de recursos avançados.
Considerando o conhecimento adquirido por meio da revisão bibliográfica, é proposta a elaboração de um protótipo relacionado ao sistema de segurança veicular. Esse protótipo pode incluir a integração de sensores de diversos tipos, utilizando a Rede CAN para a comunicação entre os diferentes componentes do sistema.
Por fim, a Rede CAN continua a desempenhar um papel fundamental na indústria automobilística, especialmente no desenvolvimento de sistemas de segurança veicular. A revisão bibliográfica mostrou sua importância, avanços tecnológicos e perspectivas futuras, enquanto a proposta de um protótipo destaca a aplicabilidade prática da Rede CAN nesse contexto. Com a contínua evolução e adaptação da Rede CAN, espera-se que a indústria automobilística aproveite seu potencial para criar veículos cada vez mais seguros, inteligentes e conectados.
6. Referências Bibliográficas
ANDRADE, L. Falta de manutenção é uma das principais causas de acidentes de trânsito. Auto Papo. Disponível em: https://autopapo.uol.com.br/noticia/acidentes-transito-falta-manutencao/ Acesso em: 11 de abril de 2023
ATMEL. Datasheet Microcontrolador ATMEGA328p. Disponível em: https://storage.googleapis.com/baudaeletronicadatasheet/ATmega328P.pdf Acesso em: 26 de março de 2023
BLOG BOVENAU. Tecnologia Automotiva – os avanços da área no Brasil. Disponível em: https://www.bovenau.com.br/blog/tecnologia-automotiva-os-avancos-da-area-no-brasil/ Acesso em: 23 de abril de 2023
COMO FUNCIONA O SENSOR DE VELOCIDADE? Blog Canal da Peça. Disponível em: https://www.CANaldapeca.com.br/blog/como-funciona-o-sensor-de-velocidade-2/ Acesso em: 9 de março de 2023
BROWN, S. Your Car, Your Computer: ECUs and the Controller Area Network. 2017. Disponível em: https://www.techopedia.com/your-car-your-computer-ecus-and-the-controller-area-network/2/32218. Acesso em: 10 de abril 2023.
CARVALHO, T. M. S. CAMPOS, L. G. Transmissão de mensagens e gerenciamento de erros em uma rede CAN automotiva. For Science. 2018. Disponível em: http://www.forscience.ifmg.edu.br/forscience/index.php/forscience/article/view/341/212 Acesso em: 6 de abril de 2023
CAVALCANTE, H. L. Sistema de monitoramento automotivo via rede CAN. Instituto federal de educação, ciência e tecnologia de Santa Catarina. Departamento acadêmico de metal-mecânica. 2018. Disponível em: https://repositorio.ifsc.edu.br/bitstream/handle/123456789/329/LARISSA%20HINCKEL%20CAVALCANTE.pdf?sequence=1&isAllowed=y Acesso em: 26 de março de 2023
CONTESINI, L. O que é ECU? Como elas funcionam?. FlatOut. Disponível em: https://flatout.com.br/afinal-o-que-e-ecu-como-elas-funcionam/ Acesso em: 15 de março de 2023
COOK J. A. FREUDENBERG. J. S. Controller Area Network (CAN). EECS 461, Fall 2008. Disponível em: https://www.eecs.umich.edu/courses/eecs461/doc/CAN_notes.pdf Acesso em; 17 de abril de 2023
DIDATECH. LabView. Disponível em: https://didatech.com.br/labview/#:~:text=O%20Que%20%C3%A9%20o%20LabVIEW,obtidas%20a%20partir%20dos%20dados. Acesso em: 10 de fevereiro de 2023
FALTA DE MANUTENÇÃO DO VEÍCULO É UMA DAS PRINCIPAIS CAUSAS DE ACIDENTES DE TRÂNSITO NO BRASIL. Portal do trânsito. São Paulo. 2020 Disponível em: https://www.portaldotransito.com.br/noticias/mobilidade-e-tecnologia/falta-de-manutencao-do-veiculo-e-uma-das-principais-causas-de-acidentes-de-transito-no-brasil/ Acesso em: 6 de abril de 2023
GALASSI, J. Rede CAN: Tudo sobre o que você precisa saber. Trimble Transportation. 2022. Disponível em: https://tl.trimble.com/blog/rede-can/ Acesso em: 05 de Fevereiro de 2023.
GUIMARAES, A, A. SARAIVA, M, A. O Protocolo CAN: Entendendo e Implementando uma Rede de Comunicação Serial de Dados baseada no Barramento “Controller Area Network”. General Motors do Brasil Ltda E Universidade de São Paulo. 2002. Disponível em: http://www.alexag.com.br/Artigos/SAE2002.pdf Acesso em: 10 de fevereiro de 2023
MUÑOZ, T. G. Comparação de Arquitetura Centralizada com Arquitetura Distribuída no Nível de Instrumentação. Dissertação Mestrado em Engenharia Elétrica – Universidade de São Paulo. 1998. Disponível em:https://repositorio.usp.br/item/000951397 Acesso em: 28 de fevereiro de 2023
IBGE. Informações sobre frota veicular brasileira. Disponível em: https://cidades.ibge.gov.br/brasil/pesquisa/22/28120 Acesso em: 28 de abril de 2023
KOLB, J.J. Modelo OSI (Open Systems Interconnection). 2016. Disponível em: https://jkolb.com.br/modelo-osi-open-systems-interconnection/ Acesso em: 15 de Fevereiro de 2023
LINEAR TECHNOLOGY. Datasheet Conversor LT3682. 2008 Disponível em: https://www.alldatasheet.com/datasheet-pdf/pdf/262083/LINER/LT3682.html Acesso em: 15 de março de 2023
MARTINS, L. A. J. A. et al. Sistemas de monitoramento e diagnóstico de transformadores de subestações. Companhia Energética de Minas Gerais – CEMIG e Universidade Federal de Minas Gerais – UFMG. 2007. Disponivel em: https://www.researchgate.net/profile/Daniel-P-Araujo/publication/325110827_Sistemas_de_Monitoramento_e_Diagnostico_de_Transformadores_de_Subestacoes/links/5af7bf78aca2720af9dea37f/Sistemas-de-Monitoramento-e-Diagnostico-de-Transformadores-de-Subestacoes.pdf Acesso em: 4 de março de 2023
MATHEUS. Y. O modelo OSI e suas camadas. ALURA. Disponível em: https://www.alura.com.br/artigos/conhecendo-o-modelo-osi Acesso em: 11 de abril de 2023
MICROCHIP. Datasheet Barramento CAN MCP2515. Disponível em: https://www.alldatasheet.com/datasheet-pdf/pdf/166906/MICROCHIP/MCP2515.html Acesso em: 22 de fevereiro de 2023
MICROCHIP. Datasheet Microcontrolador PIC18F4580. Disponível em: https://www.alldatasheet.com/datasheet-pdf/pdf/115727/MICROCHIP/PIC18F4580.html Acesso em: 20 de março de 2023
MICROCHIP. Datasheet Transceiver MCP2551. Disponível em: https://www.alldatasheet.com/datasheet-pdf/pdf/84059/MICROCHIP/MCP2551.html Acesso em: 4 de março de 2023
NASCIMENTO, C. L. Protocolo de comunicação CAN e suas aplicações na indústria automobilística. Universidade São Francisco Curso de Engenharia Elétrica. 2006. Disponível: https://lyceumonline.usf.edu.br/salavirtual/documentos/1598.pdf Acesso em: 31 de março de 2023
NASCIMENTO, Y. ALVES, T. LACERDA, M. Rede CAN – Controller Area Network. Universidade Federal do Rio de Janeiro – UFRJ
Departamento de Engenharia Eletrônica e de Computação – DEL. 2019. Disponível em: https://www.gta.ufrj.br/ensino/eel878/redes1-2019-1/vf/CAN/arquitetura.htm Acesso em: 31 de março de 2023
NATALE, M. D. Understanding and Using the Controller Area Netwok Communication Protocol: Theory and Practice. 2012. (Dentro do SOUZA) 28 de abril de 2023
NORMA ISSO 11519-2:1994. Road vehicles — Low-speed serial data communication — Part 2: Low-speed controller area network (CAN). Disponível em: https://www.iso.org/standard/19470.html Acesso em: 30 de abril de 2023
OLIVEIRA, G, A. A evolução tecnológica automotiva tem muitas surpresas sobre os períodos de desenvolvimento. Grupo Oficina Brasil. Disponível em: https://www.oficinabrasil.com.br/noticia/tecnicas/a-evolucao-tecnologica-automotiva-tem-muitas-surpresas-sobre-os-periodos-de-desenvolvimento-parte-1. Acesso em: 17 de abril de 2023
PEREIRA, R. V. M. ZEFERINO, A. C. Aplicação do protocolo lin como sub-rede CAN. UNIVALI. INDUSCON Vlll Conferência internacional de aplicações industriais. 2008. Disponível em: https://www.researchgate.net/publication/267372136_APLICACAO_DO_PROTOCOLO_LIN_COMO_SUB-REDE_CAN#pf2 Acesso em: 9 de março de 2023
RAJAGOPAL, P. Mega Trends Driving Automotive OEM – Part 1. Seeking Alpha. 2018. Disponível em: https://seekingalpha.com/article/4031150-mega-trends-driving-automotive-oem-part1?open_reset_password=true&origin=confirm_registration&utm_campaign=%7Cconfirmation_link_registration&utm_medium=email&utm_source=seeking_alpha Acesso em: 12 de março de 2023.
SILVA. L, I. Barramento CAN entre arduinos UNO. Disponível em: https://embarcados.com.br/barramento-CAN-entre-arduinos-uno/. Acesso em: 28 de fevereiro de 2023
SOUZA, A. G. de; CAMPOS, G. L. Rede CAN veicular: levantamento bibliográfico e apresentação de conceitos iniciais. For Science. 2017. Disponível em: http://www.forscience.ifmg.edu.br/forscience/index.php/forscience/article/view/234/142 Acesso em: 22 de fevereiro de 2023
SOUZA, V. P. Estudo e Elaboração de uma Rede CAN para Aplicação em um Sistema Automotivo. Centro Federal de Educação Tecnológica de Minas Gerais Engenharia Mecatrônica. 2013. Disponível em: https://www.eng-mecatronica.divinopolis.cefetmg.br/wp-content/uploads/sites/195/2019/12/Paulo-V%C3%ADtor-de-Souza1.pdf Acesso em: 20 de março de 2023
TIRONI, O. I. P. et al. Rede CAN automotiva, perspectivas gerais e vulnerabilidades. XVI CEEL. Universidade Federal de Uberlândia, 2018. Disponível em: https://docplayer.com.br/126369199-Rede-CAN-automotiva-perspectivas-gerais-e-vulnerabilidades.html Acesso em: 23 de abril de 2023