REGISTRO DOI: 10.5281/zenodo.10069951
Carlos André Corrêa da Silva1
Samuel Soares de Lima2
Gabriel Sá3
Pablo Augusto da Paz Elleres4
RESUMO
O detector automático de acidentes com motocicletas é um dispositivo capaz de reconhecer acidentes com motocicletas acionando os sistemas de saúde automaticamente, além de encaminhar um SMS para um contato pré-cadastrado com informações importantes como tipagem sanguínea e localização em tempo real. Foi utilizado como método para produção do dispositivo a ligação dos módulos de Arduino, GSM, GPS e Acelerômetro tendo por finalidade detectar a queda das motocicletas, ocasionadas por acidentes, a partir de dados coletados sobre possíveis oscilações nos eixos X e Y junto com a aceleração do veículo. Tendo como objetivo demonstrar como o uso de novos aparelhos de segurança agregados a tecnologia, pode ser benéfico para o condutor, otimizando a resposta dos serviços de saúde. Resultando assim na diminuição dos custos com atendimentos a acidentes no trânsito, redução de possíveis lesões graves assim como possibilitar a assistência em locais remotos através de um dispositivo funcional acoplado à motocicleta.
Palavras-chave: Detector Automático, Moto, Queda.
1 INTRODUÇÃO
A segurança no trânsito tem se tornado um assunto prioritário devido ao aumento da frota de veículos e tráfego rodoviário. De acordo com os dados do Ministério da Saúde levantados pela Associação Brasileira de Medicina de tráfego (ABRAMET), entre março de 2020 e julho de 2021 o SUS registrou 308 mil internações de pessoas em decorrências de sinistros de trânsito em todo o país, representando ainda os acidentes de moto em 54% do total. Em 2021, 5 mil pessoas morreram em 64 mil acidentes de carro, os acidentes em estradas e vias rodoviárias representam ameaça à segurança pessoal e desafiam os órgãos de respostas de emergências como SAMU e empresas privadas, muitas vezes já sobrecarregadas. Diante do exposto, o desenvolvimento de um dispositivo capaz de reconhecer automaticamente acidentes veiculares e acionar sistemas de saúde em tempo real representa um avanço na segurança dos condutores.
O objetivo do presente projeto é desenvolver um detector automático de acidentes com motos no intuito de reduzir significativamente o tempo de resposta a acidentes críticos, elevando as chances de sobrevivência assim como minimizar possíveis lesões graves. O sistema possui a capacidade de enviar informações cruciais, como nome e tipo sanguíneo, localização em tempo real, data hora e gravidade do acidente para contatos pré-cadastrados, tornando-se elemento-chave na assistência médico-hospitalar para os motoristas e permitindo que profissionais de saúde e equipes de resgate atuem com maior eficácia.
Este projeto utiliza como tecnologia um giroscópio e os módulos GMS e GPS conectados a um microcontrolador Arduino. A importância deste trabalho se fundamenta na contribuição para um trânsito mais seguro, ágil e eficiente para os usuários de automóveis.
2 REFERENCIAL TEÓRICO
Neste tópico serão abordados os registros de acidentes com motos no país, os principais sistemas de detecção de quedas com motocicletas, bem como as automações voltada para detecção de acidentes com motocicletas.
2.1 Registros de acidentes com motos no Brasil
Segundo o artigo “Caracterização das vítimas de acidentes de trânsito atendidas pelo Serviço de Atendimento Móvel de Urgência (SAMU) no Município de João Pessoa, Estado da Paraíba, Brasil, em 2010” revista “Epidemiol. Serv. Saúde, Brasília outubro – dezembro 2012”. Em 2004, os acidentes de trânsito totalizavam 2,2% das principais causas de mortalidade no mundo. A estimativa para 2030 é que o percentual alcance 3,6%, passando a ser a quinta principal causa de mortalidade. Os acidentes de trânsito provocam, no mundo, a morte de aproximadamente 1,3 milhão de pessoas e lesionam de 20 a 50 milhões de outras a cada ano. Desse total de mortes, quase a metade (46,0%) são pedestres, ciclistas ou motociclistas, considerados mais vulneráveis no trânsito (World Health Organization, 2009).
A partir dos dados apresentados temos como principal foco os acidentes evolvendo motociclistas, visto que como é um veículo, que é mais usado pela sua facilidade na locomoção, onde motocicletas representam 26,9% da frota veicular brasileira, uma porcentagem que vem crescendo ano a ano. Como meios de transporte, elas são em média mais econômicas, menos poluentes e mais baratas do que um carro transportando apenas um passageiro (Gouvea, 2018).
Com isso, é importante citar que no Brasil, o serviço de atendimento pré-hospitalar, o qual agia somente nas capitais e com foco no atendimento de vítimas de lesões traumáticas, foi reformulado em 2003, constituindo-se o Serviço de Atendimento Móvel de Urgência (SAMU), que inclui o atendimento de diversas necessidades. Este serviço consiste em uma das primeiras instâncias da Saúde a sofrer os impactos causados pelos acidentes de trânsito, no atendimento às suas vítimas (Destri, 2005).
Nesse presente cenário os acidentes com motocicletas representam 30,3% do total de acidentes de trânsito registrados no Brasil, mas ainda mais preocupante são as estatísticas ao se comparar acidentes de motos aos acidentes de carro: motociclistas possuem uma probabilidade 200% maior de sofrer um ferimento grave, e ainda 310% maior de sofrer uma fatalidade (Waiselfisz, 2013).
2.2 Sistema de detecção de quedas com motocicletas
É perceptível a necessidade de uma forma de intervenção a esse cenário com a implementação de um Sistema de Detecção de Acidente (DAS), eficaz capaz de ampliar e agilizar o atendimento em caso de acidentes, pois em casos de acidente envolvendo motociclistas, o tempo de resposta dos serviços de emergência é vital para as chances de sobrevivência do acidentado (Gouvea, 2018).
Possuindo como base para dados de acidentes de moto o artigo de (Bellati; Cossalter, 2005) onde destaca principalmente as variações entre possíveis maneiras como vir a ocorrer um acidente por meio de simulações, que proposto por (Gouvea, 2018) se destacam as de Highside e Lowside:
Lowside durante frenagem: Quando ocorre um tombamento decorrente de uma perda de tração por frenagem no qual a parte superior da moto tende contra o sentido de viagem do veículo;
Highside durante frenagem: Quando ocorre um tombamento decorrente de uma perda de tração por frenagem no qual a parte superior da moto tende a favor do sentido de viagem do veículo;
Lowside durante curva: Quando ocorre um tombamento decorrente de uma perda de tração durante uma curva no qual a parte superior da moto tende contra o sentido de viagem do veículo;
Highside durante curva: Quando ocorre um tombamento decorrente de uma perda de tração durante uma curva no qual a parte superior da moto tende a favor do sentido de viagem do veículo;
Dando destaque a Highside e Lowside de acidentes com Único-Veículo, proposto por (Acem, 2004) que classifica os acidentes entre dois tipos para melhor separação e entendimento. Assim sendo os Multi-Veículos (ocorre entre o motociclista e outro veículo) e Único-Veículo (ocorre por meio de algum tombamento decorrente da perda de tração em algum dos pneus).
2.3 Automação voltada para detecção de acidentes com motocicletas
Com base nos artigos mencionados anteriormente, como banco de dados de teste de quedas de motociclistas, visou-se um dispositivo, que por meio de um microcontrolador integrado com os módulos de um sistema de comunicação celular – GSM e GPS, fornecendo a localização, velocidade, data e hora e deslocamento, que em comunicação com o Serviço de Atendimento Móvel de Urgência, principalmente em casos graves onde o motociclista não possa contatar o mesmo, terá como visão diminuir o taxa de mortalidade ocasionada por acidentes de trânsito envolvendo motos.
O algoritmo trabalhado proporciona ainda outros dados decorrente da análise do acionamento caso ocorra o acidente como destacar se o veículo está ligado e desligado, veículo em movimento e parado, ou veículo deitado e em pé. Assim, caso em movimento e em velocidade ocasionar a queda, haverá acionamento.
Por outro lado, as várias tecnologias de detecção e identificação de motocicletas enfrentam dois desafios, sendo os principais fatores: poder de computação (já que a maioria das motocicletas se deslocam em estradas) e a confiabilidade da detecção. (Amir, Likun e Tang, 2013), onde se pode acabar ocorrendo falsos positivos. Que pode ser contornado pela aplicação correta do algoritmo como proposto por (Licchetti; Tanaelli; Ssavaresi; Santucci, 2016) que utiliza os sensores IMU de um smartphone para a detecção de acidentes. Ao contrário de outros algoritmos que utilizam a detecção de variações dinâmicas.
3 MATERIAIS E MÉTODOS
Após implementação dos diversos métodos para análises dos resultados, obteve-se como preceito a divisão em cinco estágios de preparação do dispositivo, assim como a utilização de uma placa soldável para suporte dos componentes utilizados, os estágios são: Protoboard, Giroscópio/Acelerômetro, Módulo GSM e Módulo GPS.
3.1 Montagem e preparação da protoboard
Foi utilizado como base para o projeto dois protoboards de 830 furos conectados, onde foram implementados os componentes eletrônicos do circuito sendo eles, um resistor de 1k5Ω, um resistor de 1kΩ, um capacitor de 2200µF, um buzzer ativo 5V, um botão push button, um ship de celular com adaptador, uma bateria 9v, uma fonte ajustável step down LM2596, jumpers, um Arduino uno, uma fita dupla-face, e um conector para bateria 9v.
3.2 Preparação do Giroscópio/Acelerômetro
O giroscópio acoplado ao Arduino possui a capacidade de detectar variações mínimas nos eixos X Y e Z assim como velocidade de aceleração e temperatura, foram utilizados os quatro pinos de entrada do dispositivo, sendo eles o VCC entrada de 5v, GND, SCL e DAS conectados nos pinos A5 e A4 do Arduino.
3.3 Preparação do módulo GSM
Com o módulo Global System for Mobile Communications – GSM é possível realizar chamadas, enviar e receber SMS através de funções e bibliotecas do Arduino. O módulo possui para conexão os pinos VCC, GND RX e TX, conectados nos pinos 10 e 11 do Arduino. Para a comunicação do módulo com a rede é necessário a utilização de um chip de rede (operadora utilizada vivo). É importante frisar que o Arduino não suporta a corrente de pico do módulo GSM para conexão a rede de celular, foi utilizado uma bateria externa de 9v ligada em um regulador de tensão, o qual transforma de 9v para 5v (tensão de funcionamento do módulo), juntamente com um capacitor de 2200µF conectado em paralelo com a fonte. É necessário a utilização de um adaptador para o plug da bateria com o regulador de tensão STEP DOWN LM2596.
3.4 Preparação do módulo GPS
A utilização do módulo de GPS é fundamental para a conexão do dispositivo com os satélites para fornecimento da localização, data e hora, deslocamento e percurso do veículo. É necessário o plug de uma antena para conexão do módulo com o satélite, assim com o SGM, o módulo GPS possui quatro pinos, sendo eles VCC GND RX e TX, conectados nos pinos 4 e 5 do Arduino. Pelo fato de possuir antena, o módulo necessita estar em espaço aberto para uma melhor comunicação com os satélites.
3.5 Desenvolvimento do código fonte (algoritmo)
A implementação de cada código foi desenvolvida primeiramente separada por módulo, seguindo a ordem para a lógica do dispositivo, primeiro o script para o funcionamento do giroscópio, posteriormente GSM e por fim o GPS. Após os testes de funcionamento individual, foi realizada a junção dos módulos e desenvolvido a lógica para os possíveis cenários de um acidente.
4 RESULTADOS E DISCUSSÕES
Para obtenção dos resultados foram utilizados como base três cenários de verificação, desde a não ocorrência de acidentes até um possível acidente de trânsito, sendo eles:
4.1 Cenário 01: Estado Inicial (Sem Registro de Quedas)
A análise do cenário inicial se dá com base no dispositivo em situação normal, com o veículo parado e em pé. É possível detectar os limites de variação dos eixos X e Y do acelerômetro e X e Y do giroscópio. Tornando assim, esses limites os parâmetros para uma situação normal. Na figura 1 abaixo tem-se primeiramente um panorama do dispositivo visto de cima e posterior os resultados no monitor Serial do Arduino com as medições.
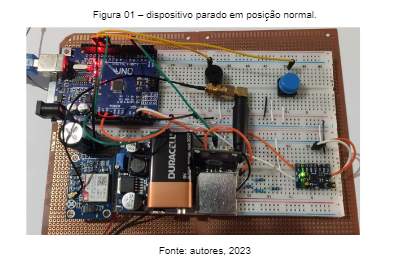
Na figura 1 (acima) há equipamentos utilizados na montagem do dispositivo, pode-se elencar no canto superior esquerdo o Arduino, dispositivo qual realiza toda a lógica e controle do sistema, abaixo tem-se os módulos GSM, GPS e giroscópio respectivamente. É de grande importância citar o push button no canto superior direito da figura, ele faz o papel de cancelar o envio do SMS contendo as informações de acidente em casos que não necessite de apoio médico.
Numa outra perspectiva, pode-se notar na figura 2 o monitor serial do Arduino contendo os parâmetros de análise. Nesta é demonstrado de modo evidente a disposição de valores tanto do giroscópio marcando os dados referentes a velocidade de aceleração nos eixos e, quanto do acelerômetro o qual recebe os dados da variação nos eixos X e Y.
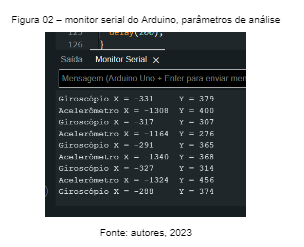
Nota-se na figura 2 os parâmetros para o acelerômetro e giroscópio utilizados na aplicação com o dispositivo parado na horizontal, tendo esses valores como padrão para o código fonte do Arduino.
Os resultados obtidos no cenário 01 informam que os valores base para uma situação normal do veículo parado serão para o acelerômetro de X e Y entre -1.500 e +1.500, visto a variação para ambos os lados “valores repetidos se virados para o lado positivo e negativo”, e giroscópio de X e Y entre -400 e +400
Desse cenário é esperado o funcionamento do dispositivo em modo de standby, não acionando o módulo GSM e GPS, mas analisando os valores constantemente.
4.2 Cenário 02: Queda do Veículo Parado.
Neste cenário, foi testado o equipamento no caso de o veículo cair por motivo fortuito, não causando um acidente com vítimas ou que necessite de uma intervenção da área de saúde. Pode-se perceber que neste tópico, o dispositivo encontra-se virado na vertical, causando uma inclinação no eixo X do acelerômetro conforme figura 5 abaixo.
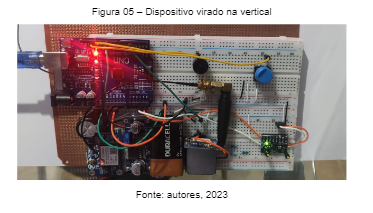
Para o cenário 02 foi utilizado o equipamento na vertical, simulando uma queda ou acidente com o veículo parado, explicando assim um cenário onde não será necessário a ativação do dispositivo.
Com o dispositivo na vertical é como se a motocicleta estivesse caída (tombado) para a lateral direita ou esquerda, o que denotaria o tombamento para um lado ou para o outro.
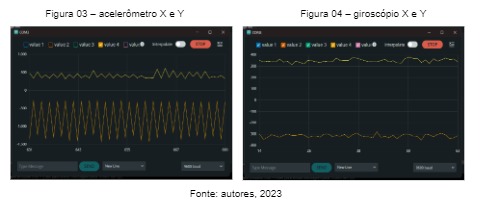
Com base nessa disposição (horizontal), fora possível detectar os valores que discriminam exatamente quando o veículo tenha tombado para as laterais direita ou esquerda, resultando em valores descritos nas figuras 6 e 7, tanto do acelerômetro, quanto do giroscópio.
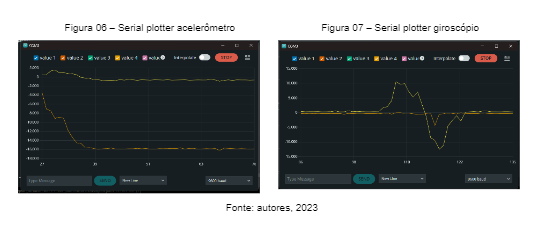
Os parâmetros obtidos da análise durante uma queda do veículo parado descritos nas figuras 06 e 07 informam que a faixa tolerável do dispositivo deve ser para o acelerômetro de X e Y entre +20.000 e -20.000.
Neste cenário temos como diferença unicamente os valores do giroscópio comparado ao cenário 01, pois, para termos uma efetiva queda com necessidade de ativação do dispositivo, o valor do giroscópio deve estar presente.
4.3 Cenário 03: Queda do Veículo em Movimento e Acionamento do Dispositivo
Neste tópico temos a temática principal do desenvolvimento, a efetiva ativação do dispositivo com a iniciação dos módulos GSM e GPS. Para análise dos resultados, exercemos uma velocidade superior no giroscópio adicionada a variação do acelerômetro, simulando um acidente com o veículo em movimento.
Fonte: autores, 2023
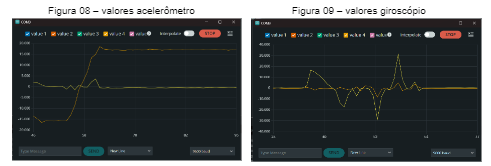
Combinando os valores de acelerômetro e giroscópio conforme as figuras 08 e 09 o dispositivo é acionado, iniciando uma contagem regressiva com o acionamento de um buzzer por um período de 01(um) minuto, “para exemplo foi utilizado 10 (dez) segundos”.
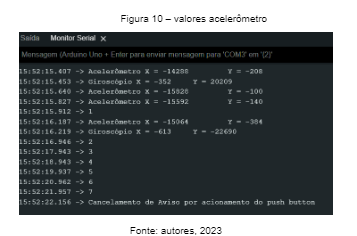
Ao ser aplicada uma força de aceleração maior no acelerômetro a contagem é iniciada e juntamente será informado no Serial do Arduino os valores de acionamento, podemos perceber que o acelerômetro foi acionado com um valor de -1.528 para o eixo X, maior que o estipulado para uma situação normal, já o giroscópio encontra-se no valor de 20.209 no eixo Y, levando assim como base um valor estipulado em testes na seguinte faixa: valores maiores que +15.000 e menores que -15.000.
No caso em destaque na figura 10 (acima), o botão anti-pânico foi acionado antes dos 10 (dez) segundos, desativando o dispositivo e cancelando o envio do SMS para um contato pré-cadastrado. Nesse ponto, o dispositivo volta para a situação de repouso e continua monitorando os dados para um posterior acionamento.
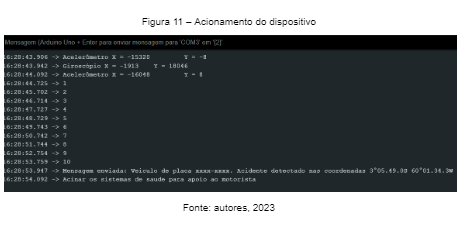
Após ultrapassar o tempo fixado para cancelar, o dispositivo entra em comunicação com o módulo GSM e GPS enviando a mensagem presente na figura 11 para um número pré-cadastrado de forma automática.
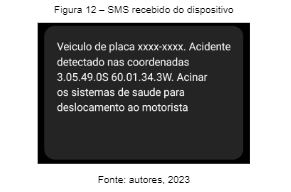
O recebimento do SMS depende do módulo SGM e conexão com a rede de celular, obrigando o dispositivo a acompanhar um chip de rede móvel, as coordenadas independem de rede, logo, funcionam mesmo em locais em sinal de celular. Após o recebimento do SMS, o dispositivo volta para o estado inicial monitorando os parâmetros do veículo. O módulo GSM não funciona se ligado diretamente no arduino, sendo necessário uma fonte externa e um capacitor para segurar o pico de corrente do módulo.
4.4 Discussões
Após os testes nos diferentes cenários (1, 2 e 3, anteriormente destacados) foram obtidos resultados dentro dos parâmetros esperados, foi definido que o dispositivo necessita de alguns pré-requisitos para o perfeito funcionamento conforme gráficos abaixo:
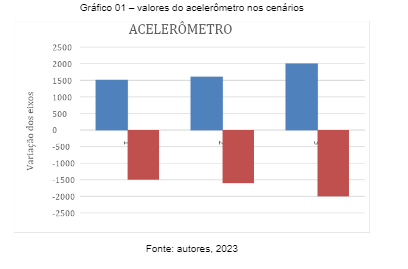
Analisando o gráfico 1 de resposta aos cenários 01 ao 03, foram definidos que a variância do acelerômetro depende dos resultados do giroscópio para acionamento do dispositivo, utilizando como resultado útil somente o cenário 03, sendo necessário o valor ser maior que 2.000 e menor que –2.000 para definir uma queda completa.
O dispositivo trabalha com a combinação dos dois dados, onde será necessário a presença de uma aceleração, caso o dispositivo seja acionado pelo acelerômetro, o sistema fará a busca dos dados do giroscópio para um possível acidente onde foi possível verificar no gráfico 2 (a seguir).
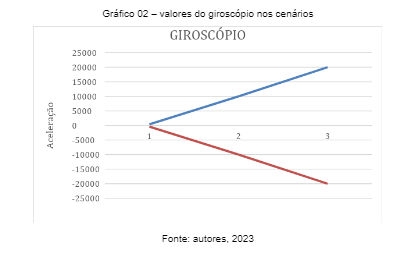
Nos parâmetros obtidos como resultados para o giroscópio apenas o cenário 03 indica uma amostra válida para um acidente, combinado com os dados do acelerômetro. Para o funcionamento do dispositivo é necessária uma alimentação externa de 05v a 12v DC, ligada ao microcontrolador. Os módulos GPS e acelerômetro/giroscópio possuem a capacidade de serem alimentados pelo microcontrolador, no entanto, o módulo GSM o qual faz comunicação com a rede de celular precisa de uma alimentação individual.
Após análises, foi definido a utilização da própria fonte de alimentação do veículo para implementação do dispositivo, onde ficará acoplado no interior da motocicleta no intuito de evitar possíveis casos fortuitos com o dispositivo, além de proporcionar maior segurança para o motociclista. É importante ressaltar que o botão para cancelamento do SMS estará exposto perto dos comandos da motocicleta.
5 CONSIDERAÇÕES FINAIS
Foi desenvolvido conforme planejado o dispositivo para detecção automática de acidentes com motocicletas resultando em um equipamento funcional e otimizado para atender a um melhor tempo de resposta, reduzindo a chance de que lesões graves possam ser fatais. É perceptível as vantagens da implementação do estudo, como a redução de custos relativos a deslocamento e sobrecarga nos serviços de emergência devido ao direcionamento com precisão para onde é necessário, permitindo a comunicação com os hospitais e equipes de saúde informando possíveis comorbidades do paciente. A Conexão do dispositivo via satélite, o torna independente de redes e dados móveis, onde em questão a assistência em locais remotos o dispositivo não dependerá do acesso à internet para funcionamento, logo, em estradas e vias remotas a chance de sobrevivência do acidentado tende a ser elevada.
Visto também que o dispositivo conectado às redes telefônicas, notificando a equipe de saúde, ocasiona a redução de gastos com erros em rotas e sobrecarga de hospitais, podendo gerar uma facilidade no atendimento. Podemos citar também a independência de testemunhas que exclui a necessidade de testemunhas para relatar acidentes caso a vítima esteja inconsciente ou impossibilitada de realizar o chamado. Quanto ao registro de dados, caso necessário a implementação de sindicâncias ou perícias, os sistemas de saúde e polícia teriam todas as informações do tipo: localização, velocidade e trajeto.
5.1 Melhorias Futuras
A principal questão é a otimização dos algoritmos para evitar os falsos positivos, pois sistemas com sensores não são infalíveis podendo possuir falhas em algum cenário informando falsos positivos.
A implementação do dispositivo para uso comercial implica em vários fatores, sendo um deles as possíveis melhorias, dentre elas, podemos citar a Com a implementação ocasiona a redução de tamanho, compactando o sistema em um hardware apresentável e finalizado, podendo torná-lo mais simples e logicamente mais acessível.
Implementação de software com acesso a aplicativo para verificação dos dados salvos, assim como análise de percursos, localização em tempo real e velocidade.
Trabalhar com dados de usuários pode se tornar um risco com vazamentos, mas podendo ser contornado a ideia com uma boa aplicação de segurança a API do aplicativo. Podemos ainda citar a manutenção e reposição de peças devido a falhas técnicas ou falta de atualizações que podem comprometer o perfeito funcionamento do dispositivo. E com a implementação do sistema gera necessidade de treinamento especializado para os operadores e equipe de atendimento dos sistemas de saúde, onde caso não haja, pode causar o efeito contrário ao objetivo do projeto, uma sobrecarga a essas equipes.
REFERÊNCIAS
ACEM, M. “The first results of a European motorcycle in-depth accident study, Proceedings of the 11th IFZ”, 2004.
COSSALTER, V.; BELLATI, A.; CAFAGGI, V. “Exploratory study of the dynamic behaviour of motorcycle-rider during incipient fall events”, Paper N° 05-0266, 19th ESV, 2005.
DESTRI, J. Jr. Sistema de apoio à decisão espacial aplicado ao serviço de atendimento móvel de urgência em vias de trânsito [Tese de Doutorado]. Florianópolis (SC): Universidade Federal de Santa Catarina; 2005.
GOUVEA, R. L. Sistema de Detecção de Acidentes Automatizado para Motociclistas Usuários De Capacete, 2018.
LICCHETTI, A.; TANAELLI M.; SAVARESI, S. M.; SANTUCCI, M. “Design of rapid first-aid alert system for 2-wheeled vehicles via smartphones’ inertial sensors”, 8th IFAC Symposium on Advances in Automotive Control AAC 2016: Norrköping, Sweden, 20—23 June 2016.
MUKHTAR, A.; TANG, T. B.; KASSIM, K. A. A.; XIA, L. On-road approaching motorcycle detection and tracking techniques: A survey. In: 2013 IEEE International Conference on Control System, Computing and Engineering. IEEE, p. 63-68. 2013.
SOARES, R. A. S.; PEREIRA, A. P. J. T.; MORAES, R. M.; VIANNA, R. P. T. Caracterização das vítimas de acidentes de trânsito atendidas pelo Serviço de Atendimento Móvel de Urgência (SAMU) no Município de João Pessoa, Estado da Paraíba, Brasil, em 2010. Epidemiologia e Serviços de Saúde, v. 21, n. 4, p. 589-600, 2012.
WAISELFISZ, J. J. “Mapa da violência 2013: Acidentes de trânsito e motocicleta,” Centro Brasileiro de Estudos Latino-Americanos, Tech. Rep., 2013.
World Health Organization. Global status report on road safety 2009: time for action. Geneva: WHO; 2009 [acessado em 15 maio. 2011]. Disponível em www. who.int/violence_injury_prevention/road_safety_ status/, 2009.
1Discente do Curso de Engenharia da Computação. E-mail: carlossilvallf@gmail.com
2Discente do Curso de Engenharia da Computação. E-mail: gabrielsabrasil96@gmail.com
3Discente do Curso de Engenharia da Computação. E-mail: samuel.engsoares@gmail.com
4Docente do Curso de Engenharia da Computação. E-mail: pablo.elleres@fametro.edu.br