COMPUTER VISION REMOTE CONTROL CAR WITH ENTITY RECOGNITION IN PYTHON
REGISTRO DOI: 10.5281/zenodo.10145321
Luccas, G. Z. A
Costa, H. M. S
Vaz, M. B
Silva, M. B. M
Noriega, C.L
RESUMO
Este artigo descreve a adaptação de um carro de controle remoto equipando-o com visão computacional, programado em Python. O sistema é dotado de uma câmera que captura imagens do ambiente e utiliza a biblioteca OpenCV para processá-las. Por meio de algoritmos de detecção de objetos e reconhecimento de padrões, o veículo é capaz de identificar itens. O carro utiliza um Raspberry Pi e reconhece entidades em tempo real com base nas informações da câmera, como “copos”, “maçãs”, “controles remotos” e “pessoas”, enviando informação para seu display, de forma que oferece versatilidade para futuras aplicações, como mapeamento autônomo, coleta de imagens e inspeção de áreas.
Palavras-chave: Visão Computacional, Raspberry Pi, Python, OpenCV.
ABSTRACT
This article describes the adaptation of a remote-control car by equipping it with computer vision, programmed in Python. The system is equipped with a camera that captures images of the environment and uses the OpenCV library to process them. Through object detection and pattern recognition algorithms, the vehicle can identify items. The car uses a Raspberry Pi and recognizes entities in real time based on information from the camera, such as “cups”, “apples”, “remote controls” and “people”, sending information to its display, in a way that offers versatility for future applications such as autonomous mapping, image collection and area inspection.
Keywords: Computer Vision, Raspberry Pi, Python, OpenCV.
1. INTRODUÇÃO
A visão computacional tem desempenhado um papel transformador em diversos setores e mercados, revolucionando a maneira como interagimos com o mundo ao redor (ORLOV, 2023). Este artigo se concentra em um projeto que incorpora a visão computacional e reconhecimento de entidades em um contexto de adaptação de um carro de controle remoto, equipando-o com estes recursos.
Para isto, foi utilizado principalmente a linguagem de programação Python e a placa Raspberry Pi, tecnologias que além de proporcionarem experiência de automação e controle, apresentam ampla gama de aplicações industriais e monitoramento (TULCHKAN e MARCHUK, 2016) como por exemplo, na indústria automotiva onde Daudat e Willcox (2018) na Agenda Setorial para Desenvolvimento, Visão 2035, destacam como tendências do setor a eletrificação veicular, conectividade e veículos autônomos.
Em 1983, Pugh previu com precisão a revolução que a visão computacional traria ao mercado, e hoje, conforme destacado por Orlov (2023) essa tecnologia continua a moldar o cenário industrial de diversas maneiras, através de sua rapidez de mudanças e tecnologias de ponta. Já a plataforma Raspberry Pi, com sua notável capacidade, versatilidade e custo acessível, como evidenciado por Pagnutti et al. (2017), se destaca como uma plataforma ideal para explorar a visão computacional.
Até o início de 2016, a Fundação Raspberry Pi já havia vendido mais de 8 milhões de exemplares, o que destaca sua relevância no cenário da tecnologia. Sua natureza compacta e operação em conjunto com o sistema operacional de código aberto (Raspbian), a torna uma escolha precisa para um sistema computacionais de pequeno porte, mas funcional e portátil.
Para a programação deste sistema então, a linguagem de programação Python desempenha importante papel. Conforme observado por Tulchak e Marchuk (2016), esta linguagem está em ascensão e possui diversas aplicações, sendo principalmente recomendada para iniciantes em programação, por ser notavelmente clara e de interpretação simples, como também enfatiza Menezes (2010). Além disso, conforme destacado por Souza (2014) e Roveda (2021), trata-se de uma linguagem de alto nível, característica que a aproxima mais da linguagem humana, tornando-a acessível a um amplo espectro de desenvolvedores.
Por fim, ferramenta computacional essencial para o desenvolvimento de um sistema com visão computacional é a biblioteca OpenCV (Open Source Computer Vision). Para desenvolvedores em Python, OpenCV é uma biblioteca de visão computacional com extensa relevância na comunidade. Com mais de sete milhões de downloads, devido à sua versatilidade e desempenho, a OpenCV é amplamente adotada em uma variedade de aplicações, incluindo robótica, automação industrial, realidade aumentada, veículos autônomos, segurança, medicina etc. É uma ferramenta essencial para desenvolvedores e pesquisadores que trabalham com processamento de imagens e visão computacional (Machine learning for OpenCV, 2017, p. 13).
Desta forma, o artigo descreve o desenvolvimento do projeto e contribui para o corpo de conhecimento da área de engenharia de computação, explorando a integração de tecnologias. Além disso, busca oferecer informações substanciais relevantes para pesquisas subsequentes e aplicações práticas na área em questão.
2. JUSTIFICATIVA
A justificativa para a realização deste artigo é fundamentada na crescente importância e aplicabilidade da visão computacional (ORLOV, 2023). Tecnologia que quando utilizada com um Raspberry Pi representa avanços significativos no desenvolvimento de sistemas de automação e controle, oferecendo uma transformação potencial em diversas aplicações (PAGNUTTI et al., 2017).
A integração da visão computacional com o reconhecimento de entidades em um contexto de controle remoto, permite a criação de sistemas que podem interagir com o ambiente de forma mais sofisticada, capturando informações e adaptando seu comportamento de acordo com entidades específicas. (DANDOIS e ELLIS, 2010).
Desta forma, apresenta ampla aplicabilidade podendo ser empregada em diferentes cenários, desde o entretenimento até aplicações industriais, como na automação de veículos, segurança e monitoramento. Isso resulta benefícios potenciais, pois o desenvolvimento de sistemas de controle remoto com capacidade de reconhecimento de entidades oferece melhorias em termos de eficiência, segurança e automação de tarefas, contribuindo para a otimização de processos e a simplificação de operações (DANDOIS e ELLIS, 2010).
Outrossim sua contribuição científica, tendo em vista que este artigo contribuirá para a base de conhecimento na área de engenharia da computação ao explorar a integração de tecnologias.
3. OBJETIVOS (GERAL E ESPECÍFICOS)
- Identificar parâmetros de visão computacional mediante reconhecimento de entidades, programado em Python, através de módulo câmera embarcado em um carro de controle remoto;
- Implementar um sistema que possa exibir os resultados do reconhecimento de entidades em um display OLED I2C utilizando os pinos GPIO do Raspberry Pi;
- Colaborar com a comunidade científica e pesquisadora sobre como integrar visão computacional em Python utilizando Raspberry Pi.
4. REVISÃO BIBLIOGRÁFICA
No contexto do projeto, faz-se necessário destacar as contribuições essenciais das ferramentas computacionais: Raspberry Pi 3 modelo B, OpenCV e Phynton.
4.1. RASPBERRY PI 3 MODELO B
Como cita Pagnutti et al. (2017), a fundação Raspberry Pi é buscada por entusiastas em tecnologia por sua alta capacidade e diversas aplicabilidades e seu baixo custo, tendo vendido mais de 8 milhões de exemplares até o início de 2016, mesmo ano em que o modelo 3 chegou ao mercado, que em conjunto com uma câmera, mais bem descrita no tópico 4.2, pode ser utilizado para visão computacional, astronomia, testes medicinais, monitoramento de segurança e outros.
É compacta e é geralmente utilizada com um sistema operacional de código aberto (Raspbian), um computador pequeno, funcional e portátil. Possui quatro portas USB 2, 1 GB de RAM, porta Ethernet, 40 pinos GPIO (General-Purpose Input Output), processador Quad Core 1.2GHz Broadcom BCM2837 64 bits, Bluetooth e WiFi embutidos, porta HDMI, entrada de energia micro USB, conexão CSI para câmera e DSI para display touchscreen de Raspberry Pi, porta de Micro SD para o carregamento do sistema operacional e armazenamento de dados, saída de vídeo RCA.
A placa Raspberry Pi 3 modelo B está exemplificada na figura 5. Para utilizar a placa é necessário ter um cartão Micro SD para armazenar o sistema operacional, uma fonte de 1A até 2.5A, um monitor ou TV, mouse e teclado. Neste trabalho foi utilizado o Raspbian, um sistema operacional gratuito otimizado para Raspberry Pi, com suporte constante pela comunidade correspondente (Raspbian, 2023).
4.2. OPENCV
A visão computacional tem um papel extremamente relevante nas inovações em diversas indústrias atuais como saúde, metalurgia, beleza, manufatura etc. (ORLOV, 2023). Para trabalhar com a visão computacional, é possível utilizar a OpenCV, que é uma biblioteca de código aberto amplamente utilizada para processamento de imagens e visão computacional. (OpenCV, 2023).
Ela foi originalmente desenvolvida pela Intel e posteriormente foi mantida pela Willow Garage e, mais recentemente, pela Itseez (que foi adquirida pela Intel). A biblioteca OpenCV é escrita em C++ e oferece interfaces para várias outras linguagens, incluindo Python e Java, tornando-a acessível para uma ampla gama de desenvolvedores (OpenCV, 2023).
Neste trabalhou optou-se por utilizar OpenCV e a biblioteca “cocolibrary” com imagens pré- treinadas para o reconhecimento de entidades utilizando um módulo câmera de 5MB para Raspberry Pi ilustrado na figura 3.
4.3. LINGUAGEM DE PROGRAMAÇÃO PYTHON
Segundo Tulchak e Marchuk (2016) Python é uma linguagem em ascensão, aplicável nas mais diversos frentes, assim como na área de Machine Learning (aprendizado de máquina). Desta forma, é uma ótima porta de entrada para os iniciantes em programação, clara e simples de interpretar (MENEZES, 2010). Como cita Souza (2014) é também uma linguagem de alto nível, o que significa estar mais próxima da linguagem humana (ROVEDA, 2021).
Existem diversos programas gratuitos que rodam esta linguagem como um dos mais populares Visual Studio Code, Pycharm, Jupyter Notebook. Porém, considerando o uso do sistema operacional Raspbian Pi no contexto deste trabalho, abre-se espaço para outros interpretadores da linguagem Python e a opção utilizada foi o Thonny – com uma interface fácil e intuitiva, outra opção seria Geany.
Adicionalmente, Python está em crescente popularidade. Esta linguagem desempenha importante papel no cenário da inteligência artificial generativa, que engloba sistemas capazes de gerar textos, imagens, áudios músicas e vídeos. Esses sistemas utilizam Modelos de Linguagem de Larga Escala (LLMs) que são treinados a partir de vastas bases de conhecimento, onde Python também pode ser utilizado (LAZZERI, 2023). Sintaxe fácil, compatibilidade com scripts curtos e projetos de grande escala, extensa quantidade de bibliotecas e suporte constante são algumas das características da linguagem de programação Python.
5. MATERIAIS E MÉTODOS
No tópico abaixo serão expostos os hardwares e eletrônicos utilizados nas fases de desenvolvimento do projeto.
5.1. HARDWARE E ELETRÔNICOS
Como um dos objetivos é identificar parâmetros de visão computacional mediante reconhecimento de entidades com uma câmera de Raspberry Pi embarcada em um carro de controle remoto, foi escolhido um carro de controle remoto Sport Champion com centro de gravidade mais baixo capaz de suportar o peso dos materiais embarcados durante todos os movimentos, conta com quatro funções (frente, atrás, esquerda, direita), pesa 440g, dimensões de 29cm de cumprimento, 15cm de largura e 9cm de altura, estrutura de plástico e pneus em borracha, necessita de 3 baterias AA de 1,5V e duas baterias AA de 1,5V para o controle remoto. (Amazon, 2023).
Figura 1 – Carrinho de controle remoto Sport Champion
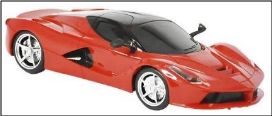
Fonte: Amazon(2023)
Para integrar a tecnologia de visão computacional ao carro de controle remoto, optou-se por utilizar o Raspberry Pi 3 modelo B. Este é um microcontrolador compacto que possui quatro portas USB 2, 1 GB de RAM, porta Ethernet, 40 pinos GPIO (General-Purpose Input Output), processador Quad Core 1.2GHz Broadcom BCM2837 64 bits, Bluetooth e WiFi embutidos, porta HDMI, entrada de energia micro USB, conexão CSI para câmera e DSI para display touchscreen de Raspberry Pi, porta de Micro SD para o carregamento do sistema operacional e armazenamento de dados, saída de vídeo RCA.
Figura 2 – Raspberry Pi 3 modelo B

Fonte: Raspberry Pi (2023)
Para utilizar a placa é necessário ter um cartão Micro SD para armazenar o sistema operacional, uma fonte de 1A até 2.5A, um monitor ou TV, mouse e teclado. Neste trabalho foi utilizado o Raspbian, um sistema operacional gratuito otimizado para Raspberry Pi, com suporte constante pela comunidade correspondente (Raspbian, 2023).
Para a “visão” do carro de controle remoto optou-se por utilizar um módulo câmera para Raspberry Pi de 5MB com conexão CSI por flat.
Além disto, optou-se por utilizar um display para exibir as informações lidas pela câmera, a escolha foi um display Oled I2C que mostra com nitidez as informações e ideal para exibir poucos dados. Possui comunicação I2C, tensão de operação 2,2-5,5V, resolução 128×64, dimensões 30 x 27mm, VCC 2,5-5,5V, GND, SCL – CLOCK, SDA – DADOS. Utilizou-se este display para exibir as informações da classe da entidade identificada e a confiança com que o programa identificou a mesma entidade.
Figuras 3 e 4 – À esquerda módulo câmera 5MBR aspberry Pi e à direita Display Oled I2C

Fonte: Robo Core(2023) Fonte: MakerHero (2023)
5.2. MONTAGEM DO PROTÓTIPO
Para a montagem do protótipo foi necessário construir suporte em papelão para o Power Bank e para o Raspberry Pi. Fixou-se com fita colante no centro do carro e na traseira para não impedir manobras, e colou-se o módulo câmera na dianteira do carro com cola quente e apontando para frente.
Utilizou-se jumpers macho-macho e macho-fêmea para conexão entre os pinos GPIO do microcontrolador para o display, fixado em uma protoboard de 400 pontos especificamente selecionada por ser leve e de pequeno porte e uma Power Bank de 6000mAh da marca Geonav com saída de 5V e 2.1A.
Figuras 5 e 6 – À esquerda protoboard 400 pontos e à direita Power Bank 6000mAh
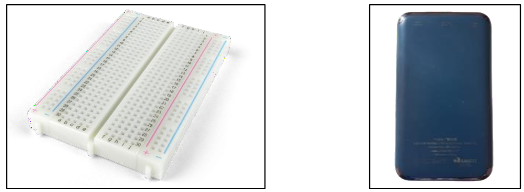
Fonte: Robo Core (2023) Fonte: Elaboração própria (2023)
Figura 7 e 8 – À esquerda jumpers macho-fêmea e à direita jumpers macho-macho
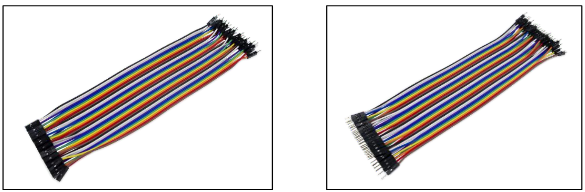
Fonte: Robo Core (2023)
A partir de pesquisas sobre como implementar visão computacional em um carro de controle remoto e baseando-se no que menciona Pagnutti et al. (2017), a fundação Raspberry Pi, criadora do microcontrolador utilizado, é buscada por entusiastas em tecnologia, já que possui uma alta capacidade, amplas aplicabilidades e seu baixo custo. Para iniciar a programação foi necessário um cartão de memória micro SD para armazenar o sistema operacional e dados. O escolhido foi da marca Sandisk classe 10, pois sua velocidade de leitura é de 100MB/s, com 32GB e indicado para ser usado com placas Raspberry Pi (Kingston Technology, 2021).
Para instalar o sistema operacional no cartão de memória foi utilizado um adaptador de cartão micro SD para computador.
Figura 9 e 10 – À esquerda cartão micro SD Sandisk e à direita adaptador de cartão microSD

Fonte: Amazon (2023)
5.3. SOFTWARE
Para efetuar a construção do protótipo foram estipuladas atividades a serem entregues em um ciclo de vida incremental, onde o levantamento de requisitos é revisitado após a conclusão das atividades propostas, testes e implantação tendo como atividades finais a instalação de Raspbian no computador, gravar a imagem no cartão SD, iniciar o microcontrolador em um monitor de escolha, implantar o código de visão computacional, restringir o escopo para encontrar apenas algumas entidades, construir o protótipo completo no quesito hardware, clonar repositório da adafruit e implantar o código para mostrar informações lidas no display. (DEVMEDIA, 2011), Cada uma das atividades descritas passou por desenvolvimento, review e teste unitário para assegurar seu cumprimento e bom funcionamento.
O sistema escolhido foi o Raspbian já que é otimizado para Raspberry Pi (Raspbian, 2023). Para o download, no site oficial da Raspberry Pi, utilizou-se a versão Raspbian Pi OS with desktop and recommended software, pois fornece um sistema pronto para o uso. Para carregar a imagem baixada no cartão de memória, foi feito o uso da ferramenta balenaEtcher, um utilitário sem custo e simples de utilizar para gravar arquivos de imagem em cartão SD. Após a conclusão da gravação o cartão está pronto para ser utilizado no microcontrolador.
Ao conectar a placa ao Power Bank com um cabo USB A – micro USB, e um cabo HDMI – HDMI em uma televisão, optou-se por programar utilizando o Thonny, uma IDE para iniciantes que suporta Python (THONNY, 2023). No projeto foram utilizadas as bibliotecas cv2 que fornece as funcionalidades da OpenCV, coco para fornecer imagens treinadas ao modelo, timepara dar delay entre uma leitura e outra, gpiozero para utilizar as saídas GPIO da placa e o módulo pathlib para acessar arquivos locais. Além disso foi clonado o repositório da adafruit, que permite a comunicação com o display Oled.
Para uma boa visualização do que a câmera está capturando foi feito um código que marca em uma borda azul o item identificado e ao lado imprime a confiança da leitura. Com isso foi possível verificar a assertividade e acurácia da visão computacional implementada, trazendo uma confiança nos objetos identificados entre 65 e 91% quando inteiramente enquadrados com distâncias entre 25 e 45cm. Para objetos em uma distância de até 2m a confiança varia entre 35 e 65%.
6. RESULTADOS E DISCUSSÃO
Nos testes de identificação de imagens com o carro, 100% das vezes que a câmera foi apontada para um objeto que está incluso na biblioteca coco ele foi identificado. Testou-se com os itens: “banana”, “carro”, “controle remoto”, “copo”, “maçã”, “mouse”, “pessoa”, “teclado”, “tesoura”, como pode-se analisar no gráfico 1.
Gráfico 1 – Objetos identificados e taxa de identificação
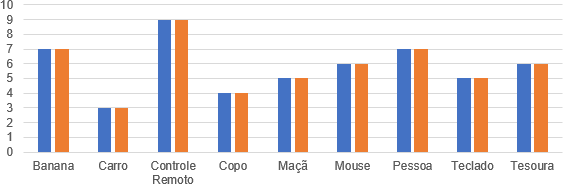
Fonte: Elaboração própria (2023)
Diversas leituras foram feitas durante a fase de construção e essas não foram armazenadas, entretanto as catalogadas contabilizam 52 leituras com média aritmética de confiança de 65,52% a uma distância média de 1,6m entre a câmera e o objeto (tabela 1).
As informações de classe e confiança expostas no display foram 100% compatíveis com os itens em foco e o mostrado no monitor. Foi identificado a dificuldade em implementar a leitura contínua de diferentes itens a qual não foi superada, mesmo com pesquisas em como deixar a leitura dinâmica, o resultado aparece uma vez e é necessário parar e retomar o código para um novo teste.
Tabela 1 – Objetos identificados e parâmetros
Classe Identificados Confiança Distância(m) 1 Banana Sim 61.92% 1 2 Banana Sim 59.77% 1,2 3 Banana Sim 60.85% 1,5 4 Banana Sim 49.00% 1,7 5 Banana Sim 51.15% 1,9 6 Banana Sim 47.92% 2 7 Banana Sim 50.08% 2 8 Carro Sim 36.08% 2 9 Carro Sim 37.15% 2 10 Carro Sim 38.23% 2 11 Controle Remoto Sim 91.00% 0,25 12 Controle Remoto Sim 88.85% 0,25 13 Controle Remoto Sim 82.38% 0,3 14 Controle Remoto Sim 83.46% 0,3 15 Controle Remoto Sim 84.54% 0,35 16 Controle Remoto Sim 68.38% 0,4 17 Controle Remoto Sim 57.62% 0,5 18 Controle Remoto Sim 58.69% 0,6 19 Controle Remoto Sim 41.46% 1 20 Copo Sim 77.00% 0,25 21 Copo Sim 78.08% 0,3 22 Copo Sim 69.46% 0,4 23 Copo Sim 56.54% 0,5 24 Maçã Sim 71.62% 0,25 25 Maçã Sim 72.69% 0,3 26 Maçã Sim 70.54% 0,4 27 Maçã Sim 64.08% 0,5 28 Maçã Sim 63.00% 0,6 29 Mouse Sim 89.92% 0,25 30 Mouse Sim 79.16% 0,3 31 Mouse Sim 69.74% 0,4 32 Mouse Sim 54.38% 0,6 33 Mouse Sim 45.77% 0,8 34 Mouse Sim 44.69% 1 35 Pessoa Sim 65.15% 0,25 36 Pessoa Sim 66.23% 0,3 37 Pessoa Sim 75.92% 0,35 38 Pessoa Sim 85.62% 0,4 39 Pessoa Sim 87.77% 0,45 40 Pessoa Sim 64.31% 1,5 41 Pessoa Sim 52.23% 2 42 Teclado Sim 73.77% 0,25 43 Teclado Sim 74.85% 0,25 44 Teclado Sim 79.15% 0,3 45 Teclado Sim 80.23% 0,3 46 Teclado Sim 81.31% 0,35 47 Tesoura Sim 86.69% 0,25 48 Tesoura Sim 80.76% 0,3 49 Tesoura Sim 74.74% 0,4 50 Tesoura Sim 43.62% 0,6 51 Tesoura Sim 40.38% 0,8 52 Tesoura Sim 39.31% 1
Fonte: Elaboração própria (2023)
Conforme análise de resultados, vê-se possível a elaboração de outros projetos em diferentes áreas, como carro autônomo, detecção de itens não conformes em linha de produção, rastreamento e segurança, exploração de áreas não seguras ou acessíveis aos humanos, até mesmo implementar inteligência artificial para tomadas de decisão mais complexas. O estudo fornece insights sobre a integração de visão computacional com Python em um Raspberry Pi, demonstrando viabilidades e limitações do sistema. A dificuldade mencionada ressalta desafios que podem ser ainda explorados em futuras pesquisas.
Figura 11 – À esquerda visão frontal do protótipo e à direita visão lateral esquerda do protótipo
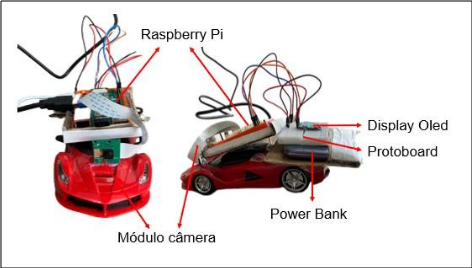
Fonte: Elaboração própria (2023)
Figura 12 – À esquerda visão de cima do protótipo e à direita visão lateral direita do protótipo
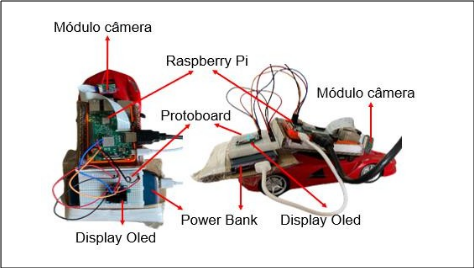
Fonte: Elaboração própria(2023)
Figura 13–Protótipo reconhecendo um controle remoto com 69,24% de confiança com distância de 25,6cm da câmera
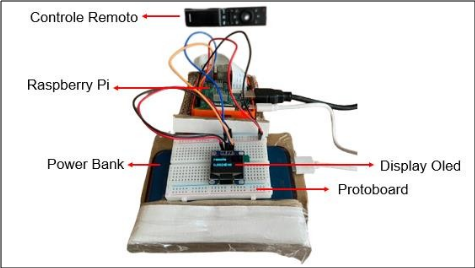
Fonte: Elaboração própria (2023)
Figura 14–Controle remoto identificado pela câmera
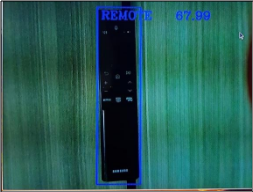
Fonte: Elaboração própria (2023)
7. CONSIDERAÇÕES FINAIS
A adaptação de um carro de controle remoto equipado com visão computacional foi possível por programação em Pyhton, aproveitando as funcionalidades de uma placa Raspberry Pi. O sistema funcionou através da exibição dos resultados do reconhecimento de entidades em um display, que apresentou total concordância em suas informações com os itens em foco. No entanto, apresentou dificuldade em realizar leituras contínuas de diferentes itens ao fazer-se necessário a interrupção e reinicialização do código para realização de um novo teste. Desta forma, os insights documentados no artigo servem como base para estudos futuros com objetivo relacionados a eficiência, segurança, automação de tarefas, otimização de processos e simplificação de operações.
8. REFERÊNCIAS BIBLIOGRÁFICAS
AMAZON. Cartão de Memória SanDisk[S.l.], 1 nov. 2023. Disponível em: https://www.amazon.com.br/Cartao-Memoria-SanDisk-microSDHCTM- Adapter/dp/B08HVWJM8C/ref=pd_bxgy_img_sccl_2/136-8007444- 6979842?pd_rd_w=jblCd&content-id=amzn1.sym.758f3509-df88-4265-806c- 565a738dc05d&pf_rd_p=758f3509-df88-4265-806c-565a738dc05d&pf_rd_r=8QHXENYQDYXS6GSS0WBV&pd_rd_wg=nf848&pd_rd_r=bbb45c86- 3a4b-43ef-8a8f-591af27543d9&pd_rd_i=B08HVWJM8C&psc=1. Acesso em: 1 nov. 2023.
AMAZON. Carro de Controle Remoto sem Pilha [S.l.], 31 out. 2023. Disponível em: https://www.amazon.com.br/Carro-Controle-Remoto-Sem- Pilha/dp/B07DGZ1R2R/ref=asc_df_B07DGZ1R2R/?tag=googleshopp00- 20&linkCode=df0&hvadid=405197024601&hvpos=&hvnetw=g&hvrand=12494693019136623489& hvpone=&hvptwo=&hvqmt=&hvdev=c&hvdvcmdl=&hvlocint=&hvlocphy=1001773&hvtargid=pla- 937111762241&psc=1. Acesso em: 31 out. 2023.
DAUDAT Gabriel e WILLCOX Luiz Daniel. Indústria Automotiva Visão 2035. Agendas setoriais para o desenvolvimento. p.183-208 (2018) Disponível em: chrome- extension://efaidnbmnnnibpcajpcglclefindmkaj/https://web.bndes.gov.br/bib/jspui/bitstream/1408/16 241/1/PRCapLiv214167_industria_automotiva_compl_P.pdf Acesso em: 16 out. 2023.
DANDOIS, Jonathan; ELLIS, Erle. Remote Sensing of Vegetation Structure Using Computer Vision. Ecological Status and Change by Remote Sensing, [s. l.], 21 abr. 2010. Disponível em: https://www.mdpi.com/2072-4292/2/4/1157. Acesso em: 16 out. 2023.
DEVMEDIA. Ciclos de Vida do Software. Engenharia de Software, [s. l.], 2011. Disponível em: https://www.devmedia.com.br/ciclos-de-vida-do- software/21099#:~:text=O%20ciclo%20de%20vida%20%C3%A9,o%20t%C3%A9rmino%20de%20 seu%20uso. Acesso em: 3 nov. 2023.
KINGSTON, Escolha do armazenamento para Raspberry Pi, 2021. Disponível em: https://www.kingston.com/br/blog/personal-storage/choosing-storage-for-raspberry- pi#:~:text=Desde%20o%20modelo%20B%2B%20(2014,para%20operar%20com%20as%20unida des. Acesso em: 3 nov. 2023.
LAZZERI, Francesca. Generative AI, Open AI, and Chat GPT: Whatarethey? Data Science at Microsoft, [s. l.], 30 maio 2023. Disponível em: https://medium.com/data-science-at- microsoft/generative-ai-openai-and-chatgpt-what-are-they-3c80397062c4. Acesso em: 1 nov. 2023.
MAKERHERO, Display Oled [S. l.], 31 out. 2023. Disponível em: https://www.makerhero.com/produto/display-oled-0-96-polegadas-i2c-azul/. Acesso em: 31 out. 2023.
MENEZES, Nilo. Introdução à Programação com Python: Algoritmos e lógica de programação para iniciantes. [S. l.]: Novatec Editora Ltda, 2010. Disponível em: https://s3.novatec.com.br/capitulos/capitulo-9788575222508.pdf. Acesso em: 31 out. 2023.
OPENCV. ABOUT.[S.l.], 2023. Disponível em: https://opencv.org/about/. Acesso em: 2 nov. 2023.
ORLOV, Pavel. How Computer Vision Is Driving Innovation Across Industries.Innovation, [s. l.], 5 jun. 2023. Disponível em: https://www.forbes.com/sites/forbestechcouncil/2023/06/05/how- computer-vision-is-driving-innovation-across-industries/?sh=273a81c55d21. Acesso em: 30 out. 2023.
PAGNUTTI, Mary et al. Laying the foundation to use Raspberry Pi 3 V2 camera module imagery for scientific and engineering purposes. Journal-of-electronic-imaging, [s.l.], 11 fev. 2017. Disponível em: https://www.spiedigitallibrary.org/journals/journal-of-electronic- imaging/volume-26/issue-1/013014/Laying-the-foundation-to-use-Raspberry-Pi-3-V2- camera/10.1117/1.JEI.26.1.013014.full?SSO=1. Acesso em: 1 nov. 2023.
PUGH, Alan. Robot Vision. [S. l.: s. n.], 1983. E-book (356 p.). RASPBERRY PI, RaspberryPi3ModelB. [S.l.], 2023. Disponível em: https://www.raspberrypi.com/products/raspberry-pi-3-model-b/. Acesso em: 17 out. 2023.
ROBOCORE, Jumpers Macho-Fêmea[S.l.], 2 nov. 2023. Disponível em: https://www.robocore.net/cabo/jumpers-macho-femea-x40- unidades?gclid=CjwKCAjw15eqBhBZEiwAbDomEquKOuopqPmzRPzbajkJ0VhMDfZjmIXpmbOwl w0aulQD_yfZVnhcexoC6lgQAvD_BwE. Acesso em: 2 nov. 2023.
ROBOCORE, Jumpers Macho-Macho. [S. l.], 2 nov. 2023. Disponível em: https://www.robocore.net/cabo/jumpers-macho-macho-x40- unidades?gclid=CjwKCAjw15eqBhBZEiwAbDomEiWTj4l-i- QCTG9ATTmm8wuvBzlBZy5VaCN3E8u4OqBPBEKGxJ3XihoC_mkQAvD_BwE. Acesso em: 2 nov. 2023.
ROBOCORE, Protoboard 400 Pontos [S. l.], 2 nov. 2023. Disponível em: https://www.robocore.net/protoboard/protoboard-400-pontos. Acesso em: 2 nov. 2023.
ROBOCORE, Camera para RaspberryPi Rev 1.3. [S. l.], 31 out. 2023. Disponível em: https://www.robocore.net/acessorios-raspberry-pi/camera-para-raspberry-pi-rev-1-3. Acesso em: 31 out. 2023.
ROVEDA, Ugo etal. O QUE É LINGUAGEM DE ALTO NÍVEL E BAIXO NÍVEL E QUAL A MELHOR?. Tecnologia, [s. l.], 24 mar. 2021. Disponível em: https://kenzie.com.br/blog/linguagem-de-alto- nivel/#:~:text=As%20linguagens%20de%20programa%C3%A7%C3%A3o%20de%20alto%20n%C 3%ADvel%20s%C3%A3o%20aquelas%20que,idioma%3A%20o%20dos%20n%C3%BAmeros%2 0bin%C3%A1rios. Acesso em: 1 nov. 2023.
SOUZA, Marco etal. Projeto de um Console de Jogos Multiplataforma com Raspberry Pi. Computer on the Beach, [s. l.], 2014. Disponível em: https://periodicos.univali.br/index.php/acotb/article/view/5308. Acesso em: 31 out. 2023.
THONNY. Thonny. Python IDE for beginners, [s.l.], 2023. Disponível em: https://thonny.org/. Acesso em: 3 nov. 2023.
TULCHAK, Liudmyla; MARCHUK, Anastasiia. History of Python. [S.l.], 2016. Disponível em: http://ir.lib.vntu.edu.ua/bitstream/handle/123456789/10471/461.pdf. Acesso em: 1 nov. 2023.
RASPIBIAN, Welcome to Raspbian. [S.l.], 2023. Disponível em: https://www.raspbian.org/. Acesso em: 18 out. 2023.