REGISTRO DOI: 10.5281/zenodo.10223651
1ºTen. Rodrigo Reis Cavalcanti;
D. Sc. Robson Francisco da Silva Dias;
CC(EN) Ulisses Anastácio de Oliveira.
Resumo
O avanço tecnológico contínuo com o objeto de reduzir custos, aumentar a eficiência dos equipamentos e minimizar danos ao meio ambiente está presente nos mais diversos setores, incluindo o naval. Este trabalho propõe ressaltar a importância de manter em constante modernização os conversores de energia, equipamentos considerados importantes nos sistemas de geração e distribuição de energia dos navios, bem como impulsionar o estudo contínuo dos usuários destes navios no que tange a eletrônica de potência. Através de uma abordagem qualitativa, foram analisados os conversores presentes em um navio da Marinha do Brasil, a fim de compreender como os fenômenos abordados se manifestam no contexto militar-naval. Visando auxiliar a análise das tecnologias dos conversores exemplificados, foram abordados conceitos referentes a tipos de conversores, dispositivos semicondutores, técnicas de modulação e tipos de topologias. Ademais, por meio de um estudo de caso sobre um conversor que não atingiu os requisitos necessários por falta de modernização, entre outros fatores, foi proposto um controle de corrente, de forma a enquadrá-lo nos requisitos mínimos estabelecidos, corroborando para o entendimento que o conhecimento técnico atrelado a implementação das tecnologias melhora a eficiência de meio naval.
Palavras- chave: conversores, avanço tecnológico, navio e Marinha do Brasil.
1 INTRODUÇÃO
1.1 Apresentação do Problema
A modernização dos equipamentos de um navio é uma etapa relevante para manter a segurança, a eficiência operacional e a competitividade de embarcações em um ambiente marítimo em constante evolução.
Os navios, sejam eles de suporte offshore, embarcações de transporte de passageiros ou navios de guerra, enfrentam desafios significativos ao longo de sua vida útil devido aos avanços tecnológicos, regulamentações mais rígidas, desgaste natural e a necessidade de se adaptar às demandas do mercado e às expectativas ambientais, sendo uma parte fundamental da gestão eficaz da frota marítima.
Nesse contexto, a modernização de equipamentos relacionados a geração e distribuição de energia de navios desempenham um papel fundamental, impactando diretamente a eficiência, a confiabilidade, a sustentabilidade e a conformidade regulatória das operações marítimas. Essa modernização é essencial para garantir que os navios estejam preparados para atender às demandas modernas de eficiência energética e sustentabilidade.
1.2 Justificativa e Relevância
A Organização das Nações Unidas (ONU), por meio de suas agências globais, trabalha com questões relacionadas à restrição de recursos, poluição ambiental e avanço de tecnologia, sendo estas algumas das maiores dificuldades globais que a humanidade tenta equalizar.
O setor naval, um dos que estão nas diretrizes dos comitês de redução de emissão de gases de efeito estufa e limitação de insumos, mostra, por meio das plataformas embarcadas em seus navios, que está comprometido em aplicar tecnologias de emprego atual. Vale ressaltar que este setor é responsável por mais de 80% do comércio global de acordo com a Organização para a Cooperação e Desenvolvimento Econômico (2016).
Nesse contexto, a International Maritime Organization – IMO, órgão da ONU – a fim de reduzir o impacto do transporte marítimo nas mudanças climáticas, a partir dos anos 2000, estabeleceu medidas técnicas e operacionais para aumentar a eficiência energética dos navios e reduzir a quantidade de emissões de CO2 do transporte marítimo (IMO, 2023).
Como estímulo para reduzir a intensidade de carbono de todos os navios em 40% até 2030, em comparação com a linha de base de 2008, os navios são obrigados a calcular duas classificações o Energy Efficiency Existing Ship Index (EEXI) e o Carbon Intensity Indicator (CII). A introdução de EEXI e CII obrigatórios surge no âmbito da estratégia inicial da IMO para a redução das emissões dos navios, adotada em 2018.
O EEXI indica a eficiência energética de um navio em comparação com uma linha de base que obriga os navios mercantes a atenderem a requisitos mínimos de eficiência energética, enquanto o CII determina o fator de redução anual necessário para garantir a melhoria contínua da intensidade operacional de carbono de um navio dentro de um nível de classificação específica.
Esses requisitos para certificação entraram em vigor em 01 de janeiro de 2023, logo as primeiras classificações serão fornecidas em 2024 (IMO, 2023). Além disso, visando melhorar a eficiência energética do navio com propulsão convencional e enquadrar os navios nestes requisitos, uma das medidas, exemplificadas pela IMO (2023), é modernizar os equipamentos empregados a bordo.
Nesse raciocínio de modernizar os equipamentos, é possível reduzir as perdas de energia durante o processo de conversão. Isso pode resultar em uma redução significativa no consumo de combustível e, consequentemente, nas emissões de carbono do navio, entre outras vantagens.
Em particular, os conversores de energia se tornam agentes facilitadores, a exemplo disto existem inúmeros empregos diferentes destes a bordo de navios. Além disso, os conversores modernos geralmente são mais compactos e leves, o que pode ajudar a reduzir o peso e o espaço ocupado pelos equipamentos a bordo. Permitindo, assim, que o navio carregue mais carga útil e melhore sua eficiência operacional.
No caso de propulsão elétrica a otimização da velocidade dos navios por meio da modernização dos sistemas de geração e distribuição de energia elétrica é uma das soluções adotadas para atender aos requisitos internacionais. Nesse enquadramento, a adoção de conhecimentos técnicos atinentes aos conversores de frequência permite controlar a velocidade de motores elétricos, ajustando a frequência da corrente elétrica.
Segundo Huang (2017), os conversores são amplamente utilizados em sistemas de geração e distribuição de energia elétrica, sendo cada vez mais focados em cobrir altas demandas, desde o nível de gigawatt em sistemas de transmissão de energia de corrente contínua de alta tensão (HVDC) até alguns watts necessários para operar um telefone celular.
Além disso, a integração de mais recursos energéticos renováveis na indústria naval é um caminho para o objetivo da descarbonização onde extensão do desenvolvimento de navios elétricos depende da confiabilidade, eficiência e economia dos conversores utilizados (Mahdi, Hoff e Østrem, 2022).
Além disso, sua não modernização acarreta retardo no avanço tecnológico do navio podendo acarretar subemprego e até perda de valor agregado, assim uma análise das tecnologias aplicadas a estes equipamentos pode proporcionar uma solução a esta problemática.
Concomitantemente, os utilizadores dos meios navais necessitam de domínio tecnológico e de atualização constante de seus conhecimentos. A conscientização dos utilizadores faz com que estes alcancem nível mais elevado de conhecimento e habilidades em relação aos sistemas elétricos tradicionais.
Diante deste cenário, a Marinha do Brasil (MB) tem feito parcerias com universidades e instituições de pesquisa para capacitar o corpo profissional da instituição e empregar tecnologias relacionadas com aumento da eficiência energética, incluindo equipamentos de eletrônica de potência.
Os militares, por integrarem parcela importante do poder naval, devem possuir capacitação para entender e operar o princípio de operação das aplicações de eletrônica de potência, bem como manter o desenvolvimento de suas competências técnicas no mais alto nível, visto que melhorias contínuas na eficiência energética do transporte marítimo são relevantes e ajudarão a absorver o custo extra de combustíveis alternativos de baixo e zero carbono.
Reiterar a importância de manter a tecnologia de conversores em alto nível nos navios tem como relevância demonstrar que o conhecimento ligado aos avanços tecnológicos pode contribuir para melhor desempenho dos meios navais, além de incentivar a busca por possibilidades de modernização dos conversores empregados.
1.3 Objetivos
1.3.1 Objetivo Geral
O trabalho possui o objetivo de ressaltar a importância de manter os navios com conversores de alto nível tecnológico e apresentar possíveis consequências de seu desempenho. O enfoque deste estudo é associar algumas das tecnologias elucidadas no estudo da eletrônica de potência aos conversores aplicados nos sistemas de geração e distribuição de energia elétrica de meios navais.
1.3.2 Objetivos Específicos
Para alcançar o objetivo geral desse trabalho será necessário apresentar o princípio de operação de alguns semicondutores de potência, principalmente, transistor bipolar de porta isolada (IGBT) e o transistor de efeito de campo de semicondutor de óxido metálico (MOSFET), e quais avanços tecnológicos este setor apresenta, bem como apresentar aspectos da modulação da largura de pulso (PWM) utilizadas para controle dos sistemas eletrônicos de energia e analisar características de topologias de conversores de frequência (como multiníveis – CMM – e de ressonância).
Outro objeto específico a ser alcançado é exemplificar as implicações dessas ferramentas quando são aplicadas (ou não) em sistemas de conversão de energia. Ao final, o trabalho apresentará que o conhecimento atrelado a prática pode ser benéfico para os navios, além de ressaltar a importância de manter um acompanhamento sobre os avanços tecnológicos atrelados aos conversores.
1.4 Etapas do Trabalho
Esta primeira seção introdutória do trabalho, visa delinear as etapas fundamentais através da apresentação de aspectos sobre a relevância e objetivos do estudo e acerca da problemática apresentada.
A segunda seção concentra-se na apresentação do referencial teórico que fornece uma base para a compreensão do tema. Acerca de conversores serão delineadas definições e parâmetros, além de explorar conceitos que se relacionam com os avanços tecnológicos e sua relevância. Isto inclui o funcionamento dos dispositivos semicondutores, as topologias de conversores e técnicas de modulação.
Durante a seção três, será apresentada a metodologia empregada e os dados observados na pesquisa de campo que focam nas características de conversores empregados em um navio da MB, acordo condições de operação, bem como correlacionam estes equipamentos com as tecnologias discutidas na seção anterior.
Outrossim, a seção quatro aborda um estudo de caso a respeito de um equipamento que não sofreu as modernizações necessárias para atingir novos requisitos de operação afetando assim o desempenho do meio naval, mas também apresenta, por meio de simulações, um retificador trifásico com controle de correte se enquadra nas especificações do caso apresentado.
Por meio dessas etapas, o trabalho visa aprofundar a compreensão do tópico, desde sua abordagem teórica até sua aplicação prática, fornecendo assim uma base sólida para as conclusões finais.
2 REFERENCIAL TEÓRICO
Com o objetivo de observar tecnologias que podem auxiliar a melhorar as condições de operação dos navios, quando o tema é gerenciamento de energia exploraremos, nesse capítulo, os conceitos fundamentais de um equipamento amplamente empregado no contexto da automação industrial: o conversor de energia.
2.1 Aspectos de Projeto
Nesta seção serão expostas algumas definições, com o objetivo de identificar características de funcionamento, bem como as diferentes tecnologias que surgem para suas aplicações em navios.
Em conjunto com os controladores lógicos programáveis, os conversores desempenham um papel essencial nas aplicações que automatizam máquinas e equipamentos empregados nas embarcações (Engelogic, 2020).
Quando aplicados na propulsão, como por exemplo no controle e acionamento de turbinas a gás (TG), é importante possuir um breve conhecimento do controle aplicado a estas máquinas propulsoras. Dentro deste contexto, as velocidades fixas dos motores são estabelecidas por dois fatores: um de natureza construtiva e outro elétrica.
A natureza construtiva está relacionada ao número de polos presentes no motor, identificáveis através das bobinas dispostas internamente. Esses polos definem e direcionam o fluxo magnético no interior do motor. A quantidade de pares de polos em um motor elétrico determina sua velocidade de operação (Engelogic, 2020).
O fator elétrico diz respeito à frequência aplicada no motor que, por sua vez, define em quantas vezes por segundo a corrente elétrica troca de polaridade, sendo este o fator mais fácil de ser alterado.
Em resumo, a ligação entre a quantidade de polos e a frequência aplicada define quantas rotações o motor poderá atingir. Um fator está ligado ao outro, portanto se alterarmos a quantidade de polos de um motor ou a sua frequência elétrica podemos obter variação de sua rotação.
Não será o enfoque deste trabalho discutir sobre os princípios de funcionamento dos motores e técnicas de controle, sendo necessário apenas o entendimento do exposto anteriormente.
Além de aplicados no sistema de propulsão, os conversores também são usados em outras aplicações, como sistemas de partida de emergência, transformadores retificadores para partida de aeronaves orgânicas, sistemas hidráulicos, soft starter para acionamento de bombas de esgoto e incêndio e sistemas de direção de tiro, onde a capacidade de ajustar a velocidade do motor de acordo com as demandas é fundamental para eficiência e controle precisos.
FIGURA 1. TIPOS DE CONVERSORES.
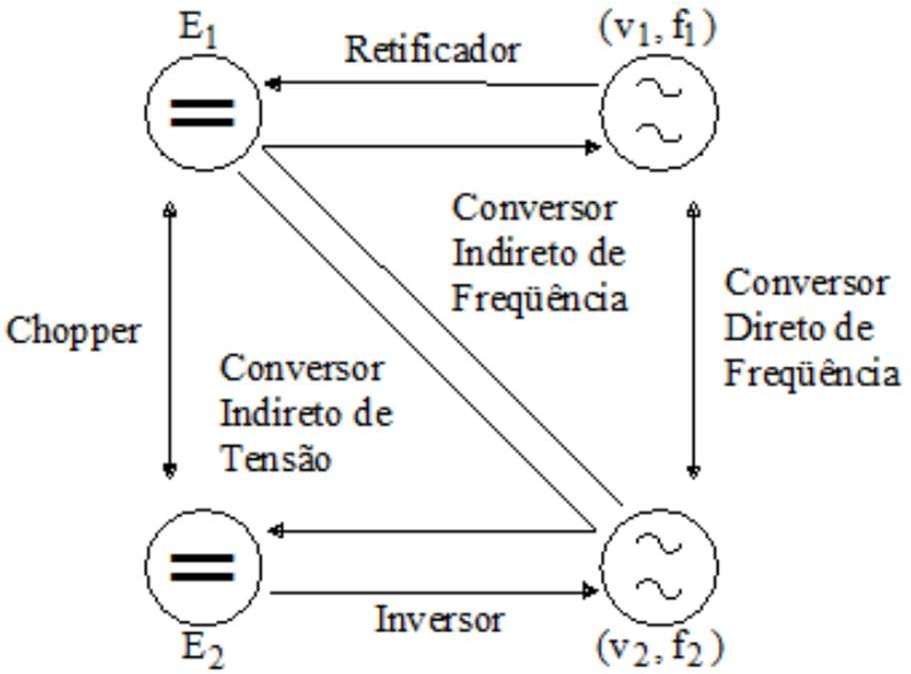
Em geral, os conversores podem ser classificados quanto ao tipo de entrada e saída de corrente (Barbi, 2006): retificadores, inversores, cicloconversores e chopper. Cada uma das fases de conversão apresentadas na Figura 1 podem ser descritas detalhadamente, pois compreendem distintos dispositivos.
Segundo Barbi (2006), os retificadores constituem exemplos de conversores que efetuam a transformação de corrente alternada (CA) para corrente contínua (CC), empregando circuitos de concepção mais simples. Eles possibilitam o processo de retificação por meio da utilização de diodos ou tiristores, seja na modalidade de meia onda ou onda completa.
Por sua vez, os inversores requerem semicondutores controlados e uma lógica para geração de CA. Esses dispositivos são empregados em sistemas de controle de máquinas CA, bem como em sistemas fotovoltaicos que produzem uma saída alternada, estejam eles conectados à rede elétrica ou operando de maneira autônoma (Silva, 2021).
Em relação aos conversores diretos de frequência, também denominados cicloconversores, eles são utilizados para efetuar a conversão da frequência de um sinal de entrada para uma frequência de saída diferente. Isso ocorre principalmente em contextos em que é necessário harmonizar e compatibilizar circuitos, como, por exemplo, no sistema elétrico interno de aeronaves, segundo Silva (2021).
Os circuitos chopper são classificados principalmente com base no parâmetro de ganho “D”, que expressa a relação entre as tensões de saída e entrada. Encontramos os conversores elevadores (Boost) quando D > 1, os conversores abaixadores (Buck) quando D < 1, e os conversores abaixadores-elevadores (Buck-Boost), que operam em regiões de transição entre as duas características mencionadas. Esses dispositivos são frequentemente empregados em sistemas de alimentação comutados e sistemas de armazenamento de energia (Silva, 2021).
Com relação a forma como são comutados serão apresentadas três possibilidades segundo Mohan, Undeland e Robbins (2003): frequência de linha, chaveamento forçado e ressonantes.
Conversores de frequência de linha (com mutação natural), onde as tensões da rede elétrica presentes são utilizadas para ajustar a velocidade dos motores por meio do desligamento dos dispositivos semicondutores de potência. Da mesma forma, os dispositivos são ligados, com fase bloqueada na forma de onda da tensão da linha. Portanto, os dispositivos ligam e desligam na frequência de linha de 50 ou 60 Hz. Estes conversores viabilizam a administração precisa da velocidade e, consequentemente, do torque do motor, segundo Rashid (2011).
Nos conversores de comutação com chaveamento forçado, geralmente utilizando semicondutores, as chaves controláveis são ligadas e desligadas em frequências altas em comparação com a da linha. Entretanto, a saída do conversor pode ser CC ou em uma frequência comparável à frequência da linha.
Conversores ressonantes e quase-ressonantes (QRC), onde as chaves controláveis ligam e/ou desligam com tensão zero e/ou corrente zero, exploram a capacidade de um circuito ressonante em armazenar e liberar energia de maneira mais eficiente que os de chaveamento convencional.
FIGURA 2. REPRESENTAÇÃO DE UM CONVERSOR ACIONANDO UM MOTOR DE INDUÇÃO.
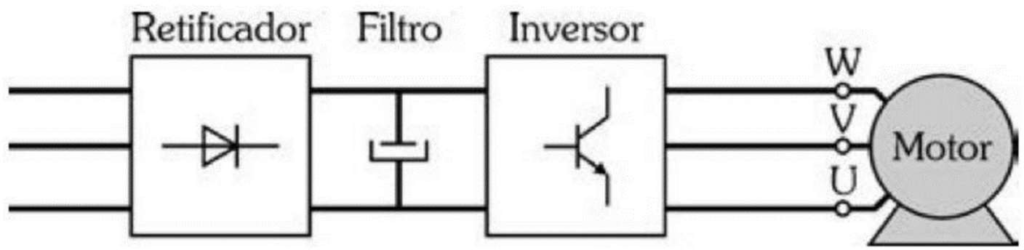
Segundo Mohan, Undeland e Robbins (2003), o retificador é o módulo responsável por alterar a CA proveniente da geração e alterá-lo para CC, conforme o empregado na Figura 2. Este componente é construído a partir de pontes retificadoras de onda completa ou meia onda, conforme descrito anteriormente.
Após a etapa do retificador, o filtro CC suaviza a corrente retificada e, por meio de capacitores, coordena o processo de chaveamento do módulo de potência e gerência os módulos de retificação (Franchi, 2008).
Enquanto no inversor, ainda segundo Franchi (2008), o princípio operacional se fundamenta no chaveamento de componentes estáticos, como tiristores ou transistores, por meio da técnica de modulação, como por exemplo modulação por largura de pulso senoidal (Sinusoidal Pulse Width Modulation – SPWM).
Fica claro que o chaveamento e seu controle são extremamente importantes quando o assunto é conversor de frequência. De forma genérica quando a chave está aberta não passa corrente e quanto está fechada ocorre o fluxo de corrente em uma ou mais direções.
O controle destas chaves pode ocorrer de acordo com o objetivo esperado, sendo este conduzir correntes altas com queda de tensão zero quando ligados ou mudar para ligado ou desligado quando acionado (Mohan, Undeland e Robbins, 2003).
O próximo tópico irá abordar as características dos dispositivos semicondutores, bem como ressaltar, através de citações, a importância da escolha correta destes.
2.2 Semicondutores de Potência
Segundo Boylestad e Nashelsky (2013), os semicondutores de potência possuem condutividade entre um bom condutor e um isolante. Em geral, são divididos em duas classes: cristal singular, como germânio (Ge) e silício (Si), e composto, como o carboneto de silício (SiC), arseneto de gálio (GaAs) e nitreto de gálio (GaN). Durante muitos anos, os três semicondutores mais frequentemente usados na construção de dispositivos eletrônicos eram Ge, Si e GaAs.
Segundo Rashid (2011), o principal emprego dos dispositivos semicondutores é em redes de comutação como interruptores, ou seja, no estado ligado ou desligado, embora existam muitos circuitos que podem realizar a conversão sem interruptores, como reguladores lineares e amplificadores de áudio. O autor afirma que o emprego como interruptores é o coração de qualquer circuito eletrônico de potência, implicando diretamente na sua relação com a eficiência do conversor.
De acordo com Huang (2017), ao longo das últimas décadas, a eficiência da conversão de energia tem aumentado constantemente, através do avanço de várias gerações de tecnologia de dispositivos semicondutores de energia. O progresso desta tecnologia levará a classificações de potência mais altas, velocidades de comutação mais rápidas e custos mais baixos.
Neste ponto, é importante esclarecer que a baixa eficiência de um sistema de energia está relacionada à grandes quantidades de potência sendo dissipada na forma de calor, enquanto a alta eficiência está relacionada à redução das perdas de condução e chaveamento em dispositivos semicondutores de potência.
A capacidade de controlar e manipular grandes quantidades de energia da entrada para a saída com uma dissipação de energia relativamente baixa no dispositivo de comutação é uma das vantagens de utilizar semicondutores na comutação. O principal motivador das inovações nesta área é obter dispositivos de energia que possam conduzir mais corrente para uma determinada tensão de ruptura (Huang, 2017).
Semicondutores como o SiC e o GaN podem ser utilizados para melhorar a eficiência e o desempenho dos sistemas de propulsão elétrica naval, reduzindo o tamanho e o peso dos componentes eletrônicos e aumentando a densidade de potência. Um breve histórico do desenvolvimento dos semicondutores de potência pode ser observado na Figura 3 e o Anexo A apresenta duas tabelas com características destes semicondutores, segundo Rashid (2014).
FIGURA 3. DESENVOLVIMENTO DOS SEMICONDUTORES.
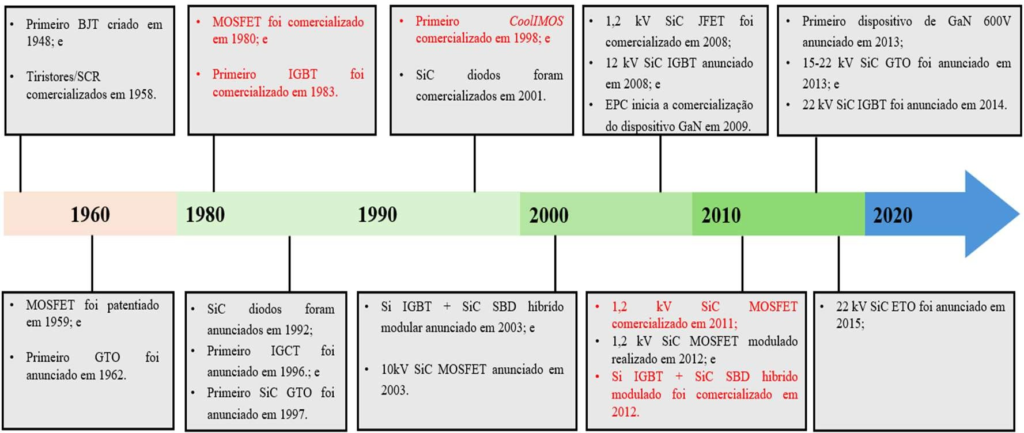
Torna-se evidente que, antes da disponibilidade de chaves de potência totalmente controláveis, os tiristores eram os principais dispositivos utilizados em circuitos eletrônicos de potência, sendo geralmente compostos por quatro camadas de Si dopado de forma diferente.
O Silicon Controlled Rectifier (SCR) é um tipo específico de tiristor que permite condução da corrente elétrica em apenas uma direção (do ânodo para o cátodo), pode ser comandado para abrir e fechar em momentos específicos e são amplamente utilizados até os dias atuais.
Com os avanços na tecnologia de semicondutores, melhorias significativas ocorreram na capacidade de controlar tensão e corrente, bem como na velocidade de comutação de interruptores totalmente controláveis (Rashid, 2011).
Em muitas aplicações de alta potência, os tiristores foram substituídos por interruptores controláveis, como os Gate Turn-Off Thyristors (GTO) e por IGBT. Além disso, passou-se a utilizar circuitos ressonantes para alcançar a comutação de tensão zero (ZVS) ou comutação de corrente zero (ZCS). O conceito de chave ressonante como substituto da tradicional chave liga/desliga será apresentado posteriormente.
Com os IGBT e os MOSFET SIC tornou-se possível desenvolver sistemas de propulsão elétrica mais eficientes e avançados, como os utilizados em carros elétricos, através de inversores de alta potência que controlam a velocidade e a potência do motor. Assim, exigem semicondutores de alto desempenho para garantir a eficiência operacional e o controle preciso, fica clara a relevância de aprofundar os estudos sobre sistemas de potência e os materiais que promovem melhor custo benefício. (Aziz, 2023)
Nos próximos tópicos serão exploradas as características dos MOSFET e IGBT, bem como de semicondutores de banda larga (Wide Bandgap – WBG), de forma que, ao final, o leitor consiga entender a diferença entre essas tecnologias e as que vem sendo desenvolvidas nesta área.
2.2.1 MOSFET
O transistor de efeito de campo de semicondutor de óxido metálico foi desenvolvido em meados da década de 1970 como forma de suprir a deficiência encontrada, até aquele momento, na operação de altas frequências, visto que os transistores de junções bipolares (BJT) apresentavam baixo ganho de corrente e alto tempo de comutação (Rashid, 2011).
O MOSFET é considerado um dispositivo unipolar controlado por tensão, pois possui apenas portadores majoritários em condução. Quando comparados aos BJT demandam menos potência de acionamento, além de demandarem uma pequena corrente de gate para serem acionados.
Atualmente, os MOSFET são os interruptores de potência comumente usados em aplicações onde as tensões operacionais estão abaixo 200 V e frequência acima de 50 kHz, bem como possuem baixas perdas no estado ligado, valores nominais de tensão baixos e fácil controle (Huang, 2017).
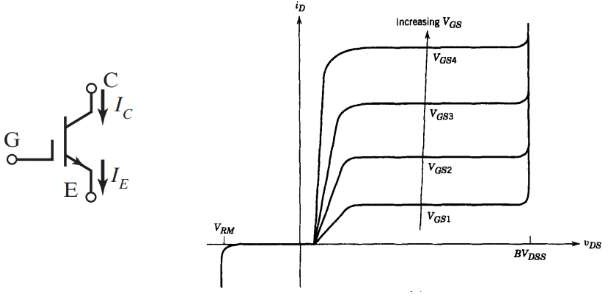
A Figura 4a exibe um tipo de MOSFET. Este tipo possui três terminais: dreno (Drain – D), fonte (Source – S) e porta (Gate – G). A corrente principal flui entre os terminais dreno e fonte. As características de corrente e tensão do MOSFET são ilustradas na 4b para diferentes valores de tensão na porta.
FIGURA 4. CARACTERÍSTICAS DO MOSFET.
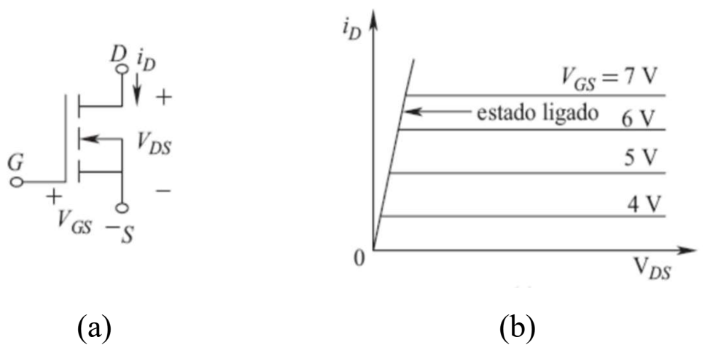
Quando a tensão dreno-porta é zero, o MOSFET está completamente desligado e se assemelha a uma chave aberta. Para colocar o MOSFET em um estado plenamente ligado, é necessário aplicar uma tensão positiva entre a fonte e a porta, normalmente variando entre 10 e 15 V. Essa tensão precisa ser mantida de forma contínua para manter o MOSFET em um estado condutor (Mohan, Undeland e Robbins, 2003).
Entretanto, segundo Rashid (2011), estes dispositivos possuem duas limitações, a primeira é a capacitância alta na porta de entrada, referente às capacitâncias de G para S e de G para D, e a segunda é o tempo de atraso considerado alto devido ao transporte de portadores pela região de desvio.
São projetados para operar em baixas tensões, oferecendo alta velocidade de comutação e eficiência ideal. Embora amplamente conhecidos, a busca por seu desenvolvimento e aprimoramento continua, conforme descrito pela maior fabricante mundial de semicondutores de potência, a empresa alemã Infineon Technologies AG (2023).
“Another major benefit of the Infineon MOSFET transistor is a significant overall reduction in energy consumption. This helps to minimize CO2 emissions, therefore reducing costs while enabling you to build more eco-friendly systems and products.” (Infineon Technologies, 2023)
A citação acima destaca a relevância da vantagem de redução da emissão de CO2 associada ao objetivo da empresa de produzir e oferecer um produto mais ecológico. Seguindo o mesmo caminho, a procura por evoluções da tecnologia do IGBT também continua.
2.2.2 IGBT
Segundo Rashid (2011), o transistor bipolar de porta isolada foi desenvolvido no início da década de 1980, visando melhorar a velocidade de desligamento das portas dos tiristores que não era adequada. Muitas aplicações não seriam economicamente viáveis sem IGBT, como por exemplo veículos elétricos e híbridos.
Com o objetivo de aprimorar o desempenho do dispositivo de energia, é vantajoso buscar baixa resistência no estado dos BJT de potência, combinando-a com alta impedância de porta, como é característico dos MOSFET. Uma abordagem mais ampla para maximizar os benefícios do controle de porta e da condução de corrente bipolar é a integração das propriedades físicas do MOSFET e do BJT em uma mesma região semicondutora. Esse conceito deu origem ao transistor bipolar de porta isolada.
A estrutura do IGBT possui características valiosas para fornecer recursos de proteção contra curto-circuito em aplicações, bem como facilitar proteções contra sobrecorrente. A área de operação segura do IGBT elimina a necessidade de amortecedores que eram essenciais quando transistores de potência bipolares eram usados. Essa capacidade confere ao dispositivo robustez, significativamente maior em comparação a outros dispositivos de silício, como o GTO e o BJT (Baliga, 2019).
Além disso, devido à modulação de condutividade, as classificações do dispositivo foram rapidamente ampliadas de 600 V para 6,5 kV, portanto, eles rapidamente substituíram MOSFET e BJT em aplicações de média a alta potência.
Em comparação com os MOSFET, têm uma área de silício consideravelmente menor, possuindo uma capacidade de corrente superior e uma maior capacidade de carga de pulso para um consumo de energia ultrabaixo, consequentemente, uma melhora na eficiência e redução do custo.
O IGBT apresenta perdas menores de chaveamento e condução, e ao mesmo tempo compartilha muitas das características atraentes dos MOSFETs de potência, como facilidade de acionamento, corrente de pico, capacidade e robustez. Um IGBT é inerentemente mais rápido do que um BJT. Entretanto, a velocidade de chaveamento dos IGBTs é inferior à dos MOSFETs. (Rashid, 2014, p. 147).
A inserção de duas portadoras no fluxo de corrente possibilita um aumento substancial da densidade de corrente em comparação ao MOSFET, Figura 5. Entretanto, a desvantagem relacionada à alta impedância na porta, exigindo apenas uma pequena quantidade de energia para comutar o dispositivo, continua (Mohan, 2012).
FIGURA 5. CARACTERÍSTICAS DO IGBT.
Os IGBT ainda apresentam pequena tensão no estado ligado, mesmo em dispositivos com alta tensão de bloqueio. Além disso, seus tempos de ligar e desligar são da ordem de 1 μs e são concebidos para suportar especificações de tensões de até 6,5 kV e 50 kHz (Mohan, 2012; Infineon Technologies, 2023).
Segundo Rashid (2011), a principal aplicação do IGBT é como componente de comutação em circuitos inversores usados tanto em aplicações de fonte de alimentação quanto em acionamento de motores. Apresentando vantagens como simplicidade e modularidade do conversor, acionamento simples da porta, menor perda de comutação e proteção aprimorada é considerado o semicondutor preferido na faixa de potência de 1 MW.
Segundo Dubut (2010), nas últimas décadas, grande esforço foi dedicado pelas instituições de pesquisas no desenvolvimento de conversores a IGBT, utilizando os modos ressonantes para auxiliar a comutação suave e técnicas que ampliam os limites de utilização dos dispositivos, possibilitando aplicações que aumentam em 3 ou 4 vezes a frequência de comutação no modo não suave.
Existem ainda os IGBT SiC que demonstram uma condutividade na camada de transporte e uma melhora na resistência de condução em comparação com os MOSFET de 10 kV. As vantagens dos IGBT de SiC incluem baixa resistência de condução, um coeficiente de temperatura ligeiramente positivo, alta velocidade, perdas de comutação reduzidas e uma ampla área de operação segura, tornando-os adequados e atrativos para aplicações de alta potência e alta frequência (Rashid, 2014).
Na próxima seção serão apresentadas algumas características dos semicondutores WBG, bem como sua relevância para o cenário global.
2.2.3Wide Bandgap
De acordo com o De Doncker (apud Silva, 2020, p. 34), foi observado que as tecnologias de chaves semicondutoras, até aquele ano, mostravam boa eficiência. O MOSFET apresentou eficiência de até 98,8%, enquanto o IGBT pode atingir até 97,2%, sob tensão contínua de 350 V.
Segundo o autor, esses resultados são comumente apresentados em sistemas trifásicos, devido à manutenção do fluxo contínuo de energia para a rede. No entanto, à medida que a tensão aumenta, a eficiência tende a diminuir, e o ponto máximo de eficiência pode cair até 50% da potência.
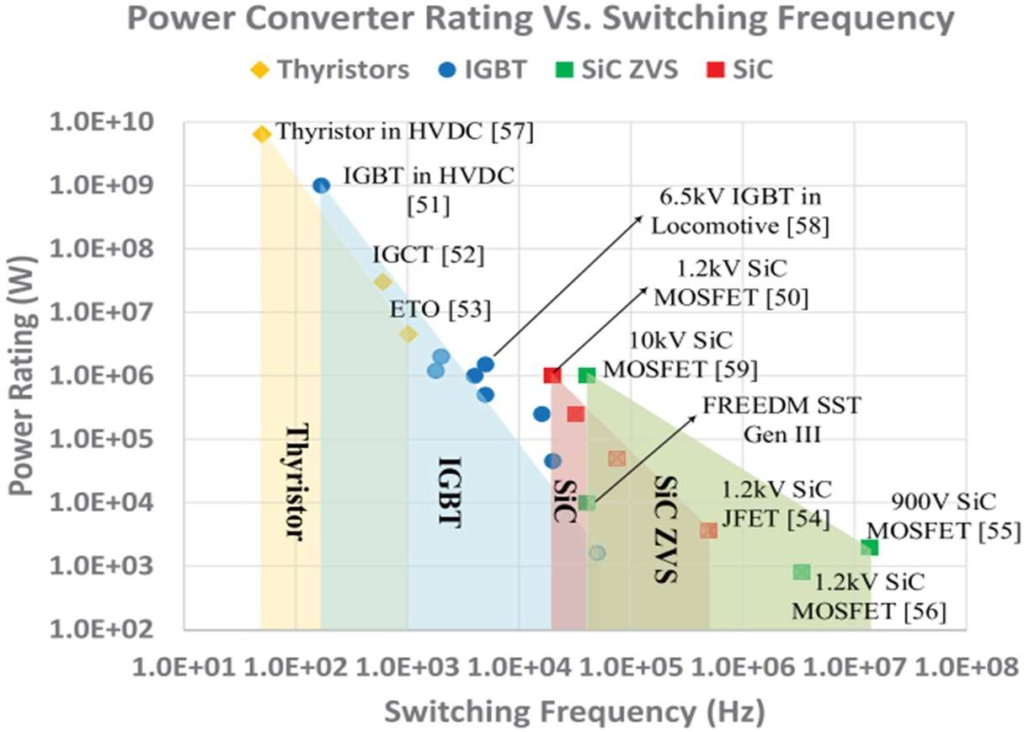
Alta eficiência é usualmente verificada em inversores fotovoltaicos e acionamentos de motores de grande porte, devido ao emprego do carboneto de silício em MOSFET e do silício em IGBT. A Figura 6 apresenta comparativo entre estes semicondutores.
Segunda Aziz (2023), isso se deve à sua habilidade condução de correntes elevadas, velocidade de comutação ágil e menor custo. Além dessas vantagens, ostentam classificação de tensão elevada, apresentando queda de tensão reduzida, o que, somado à minimização das perdas por indutância e resistência térmica, os torna escolha natural em contextos que envolvem motores de alta potência, tais como sistemas industriais.
O autor ainda destaca que o IGBT está sujeito a tendência significativa à fuga térmica. A fuga térmica ocorre quando a temperatura do dispositivo aumenta incontrolavelmente, a qual prejudica o desempenho e, por fim, leva à falha do componente.
Esse aspecto é relevante em cenários de acionamento de alta demanda, caracterizados por correntes intensas, tensões elevadas e operações rigorosas. Em tais contextos, a gestão térmica não adequada representa risco considerável no planejamento de projetos.
Para superar esse desafio de projeto opta-se pelo MOSFET SiC, devido a boa condutividade térmica do SiC, aproximadamente três vezes maior do que a do Si, ocorre dispersão mais eficiente do calor, o que resulta em condições operacionais mais estáveis em termos de temperatura. Essas características tornam os MOSFET SiC adequados para ambientes com altas temperaturas, como aplicações automotivas e industriais (Aziz, 2023; Keeping, 2021).
FIGURA 6. GRÁFICO COMPARATIVO DE SEMICONDUTORES.
Adicionalmente, sua boa condutividade térmica pode inclusive eliminar a necessidade de sistemas de resfriamento suplementares, com a possibilidade de redução do tamanho total do sistema e, consequentemente, dos custos adicionais.
Como os MOSFET SiC operam em frequências de comutação mais altas e obtém alta eficiência quando comparados com os IGBT Si, eles são ideais para aplicações em que o controle preciso do motor é essencial, no entanto, seu custo é maior (Zhang, 2019).
Segundo Keeping (2021), as vantagens de desempenho dos MOSFET SiC em comparação com os MOSFET Si e IGBT têm sua base no substrato semicondutor WBG das chaves.
Enquanto os MOSFET Si apresentam uma energia de apenas 1,12 elétron-volts (eV), os MOSFET SiC se destacam com uma energia de 3,26 eV. Essa diferença significativa implica que os transistores WBG podem suportar tensões de ruptura muito mais elevadas do que os dispositivos de Si, bem como uma tensão de campo de ruptura cerca de dez vezes superior à do Si.
Essa elevada tensão de campo de ruptura possibilita uma redução na espessura do dispositivo para uma tensão dada, resultando na diminuição da resistência e, consequentemente, na redução das perdas de comutação, além de aumentar a capacidade de transporte de corrente. No contexto geral, segundo Han, et al. (2021), o IGBT SiC mostra maior competitividade em campos de alta tensão, alta temperatura e alta potência, porém existem desafios para sua comercialização como a fabricação de IGBT SiC tipo n, vida útil insuficiente, propriedades ruins da interface e falta de embalagem de alta tensão e alta temperatura.
The aim is to continue investing in the development of actively switched power semiconductor devices. The fast-switching time of silicon (Si) devices permits improved control over voltage, frequency, and current. Silicon-carbide (SiC) has been supplanting silicon in many industry applications due to its higher switching frequencies and lower switching losses, thereby reducing waste heat. This allows reducing the size and weight of electromagnetic components associated with power conversion equipment through redesign (NAVSEA’s Electric Ships Office e U.S.A. Navy, 2019, p. 25).
A citação acima demonstra que esse avanço é debatido e interessa ao meio militar. O documento utilizado como referência foi elaborado pela NAVSEA’s Electric Ships Office e U.S.A. Navy (2019) visando a implementação de estratégias, prioridades e tecnologias avançadas para a força naval americana.
Fica claro que esta marinha concentra esforços de curto e médio prazo no desenvolvimento baseado em SiC de conversores que utilizam dispositivos de 1,7 kV, seu foco seguinte será no desenvolvimento de dispositivos SiC baseados em 6,5 kV e 10kV para o emprego em conversores de energia, fazendo assim com que este seja a espinha dorsal da distribuição de energia.
Mantendo sua visão voltada para o futuro, ainda explora dispositivos semicondutores WBG que demonstraram um desempenho superior ao SiC, como o GaN e o óxido de gálio (Ga2O3).
Torna-se evidente que, não apenas no âmbito naval, mas em diversas outras áreas, incluindo a indústria aeronáutica, como proposto por Eleodoro (2022), os WBG têm apresentado um rápido desenvolvimento nos últimos anos. Isso tem possibilitado uma melhoria na eficiência e na densidade de potência nos projetos de conversores de eletrônica de potência, abrangendo uma ampla variedade de aplicações.
No entanto, a adoção generalizada de sistemas de conversão de energia com estes dispositivos semicondutores ainda é um desafio global. Uma razão é que o SiC é uma tecnologia que necessita de configurações complexas. A integração da tecnologia SiC no sistema elétrico requer um profundo conhecimento do projeto do sistema, incluindo instabilidades, interferência eletromagnética (EMI) e aspectos térmicos, o que acarreta custo ampliado dos dispositivos com estas tecnologias (Han, et al., 2021).
O contínuo desenvolvimento e emprego de semicondutores modernos, como os debatidos anteriormente e outros como GaN e Ga2O3, amplamente utilizados em carros elétricos, não tem a previsão de parar, bem como as técnicas de modulação as quais controlam o acionamento destes semicondutores.
2.3 Técnicas de Modulação
“For control purposes, the on-time interval or pulse width can be adjusted to achieve a desired result. We can term this adjustment process pulse-width modulation (PWM), perhaps the most important process for implementing control in power converters.” (Rashid, 2011, p. 12).
Conforme citação acima, os interruptores tendem a formar ondas de tensão de saída quadradas, entretanto visam obter tensão mais próxima da senoidal. Para isso modulam sua largura de pulso através da técnica PWM.
Nesta técnica os interruptores são alternados entre ligadas e desligadas, permitindo o controle de parâmetros pela variação da largura dos pulsos. Existem várias técnicas de PWM, como modulação por largura de pulso múltipla, trapezoidal, em escada, senoidal (SPWM), de 60° e terceiro harmônico PWM (THPWM).
Algumas destas envolvem a comparação entre uma onda de referência (modulante) com uma onda portadora para gerar pulsos de largura variável, enquanto outras podem converter uma entrada monofásica em uma saída trifásica.
É fundamental destacar que o PWM desempenha papel importante na forma de onda resultante e, consequentemente, na eficiência dos conversores. Além disso, ao controlar o tempo de comutação das chaves é possível gerar formas de onda mais próximas do valor eficaz desejado, contribuindo para um melhor desempenho do sistema (Rashid, 2011).
Segundo Patel, et al. (2009), a técnica PWM possui menor dissipação de energia, é fácil de implementar e controlar e permite um controle linear da amplitude da saída de tensão/corrente. Entretanto, apresenta desvantagens como ocasionar a atenuação da componente fundamental, frequências de comutação drasticamente aumentadas significando maiores tensões nos dispositivos de comutação associados e geração de componentes harmônicos de alta frequência.
No caso da modulação SPWM, o sinal portador é uma onda triangular e o sinal modulante é uma senoidal, proveniente da malha de controle, após a comparação é possível encontrar a forma de onda da tensão de saída. A onda triangular controla a frequência de chaveamento, enquanto o gerador de onda senoidal determina a largura dos pulsos. Nesta técnica é possível eliminar ou reduzir harmônicos de ordem inferior ao ajustar o número de pulsos por semiciclo (Yu, Mohammed e Panahi, 1997).
Por outro lado, ao aumentar o número de pulsos o número de harmônicos de ordem superior pode aumentar, neste caso, esses podem ser facilmente filtrados com uso de filtros passivos de baixo volume.
Segundo Sahoo (2012), após análise comparativa do espectro harmônico e da distorção harmônica total (THD) das técnicas citadas anteriormente, SPWM e THPWM se destacam em relação às outras. Além disso, fica claro que após a adição de filtro, os harmônicos de ordem superior são eliminados e a THD reduzida para cerca de 5%.
Novas técnicas de modulação estão em constante desenvolvimento, como a proposta por Haq, et al. (2020), que apresentou técnica de modulação para um inversor modular multinível em cascata de 3 fases e 15 níveis. Essa técnica resultou em menor THD (4,89%) e menor perda no inversor em comparação com as técnicas de modulação tradicionais.
Em resumo, a modulação por largura de pulso é uma técnica essencial na eletrônica de potência e a escolha da técnica PWM adequada depende das necessidades específicas de cada aplicação.
Não menos importante, a topologia que o conversor está configurado deverá apontar a técnica utilizada para controlar a tensão ou corrente de saída, garantindo desempenho adequado para cada aplicação.
2.4 Topologias
A análise das diferentes topologias fornece informações valiosas sobre as vantagens e desvantagens de cada uma. Nos últimos anos, foram desenvolvidas e aprimoradas várias topologias, sendo que o conversor modular multinível se destacou como uma opção significativa.
No entanto, técnicas como o conversor ressonante e o retificador de onda completa controlado continuam sendo empregadas em diferentes cenários. Esses conceitos serão expostos nas seções subsequentes de maneira a facilitar a compreensão e, para uma abordagem mais aprofundada, é necessário consultar referências bibliográficas.
2.4.1 Retificador de Onda Completa Controlado
Dentre os diversos tipos de retificadores podemos citar os não controlados ou controlados de meia onda ou onda completa, além da possibilidade de serem monofásicos, trifásicos ou até mesmo polifásicos. (Rashid, 2014)
Os retificadores não controlados são os mais simples, operados a diodo, permitindo que a corrente flua apenas durante metade do ciclo da onda CA. Apesar da baixa complexidade, sua aplicação pode ser adequada para projetos nos quais não é necessário controle de tensão e não se deseja maior qualidade de energia.
Nos retificadores controlados com comutação de linha, o comando é feito por meio de um circuito conectado ao terminal de gatilho do SCR. Segundo Carvalho, Pediatidakis e Lima (2017), além de permitir um controle do valor médio da tensão de saída do conversor, a grande vantagem desse método é que o SCR começa a conduzir com corrente de disparo baixa.
Além disso, ele mantém o estado “ligado” mesmo após o disparo, o que significa que o acionamento pode ser realizado por um pequeno pulso quando o SCR está polarizado diretamente do ânodo para o cátodo, semelhante a um diodo.
Ainda segundo os autores, ao realizar esse “corte” na tensão de saída, em um ponto conhecido como “ângulo de disparo”, é possível controlar o nível médio da tensão e corrente de saída, proporcionando controle sobre a dissipação de energia.
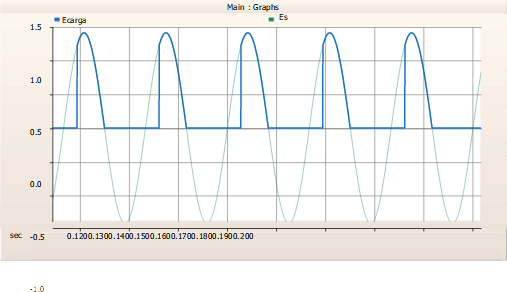
O retificador controlado de meia onda, Figura 7, retira energia apenas durante metade do ciclo da onda CA, mas são capazes de controlar o momento em que isso ocorre. Eles oferecem controle parcial da potência, mas têm a desvantagem de gerar uma saída CC com quantidade significativa de ripple de tensão, o que pode ser indesejável em algumas aplicações sensíveis, conforme visto na Figura 8.
FIGURA 7. RETIFICADOR DE MEIA ONDA MONOFÁSICO CONTROLADO A TIRISTOR MONTADO NO EMTDC/PSCAD.
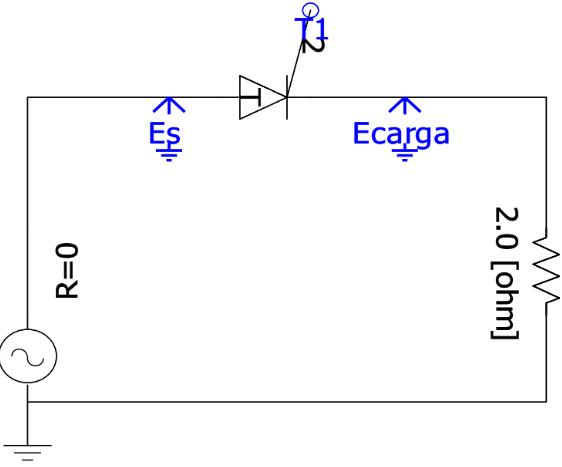
FIGURA 8. FUNCIONAMENTO DO RETIFICADOR DA FIGURA 7.
Os retificadores trifásicos controlados de onda completa ou ponte de Graetz como alguns autores denominam, por outro lado, oferecem melhor controle sobre a potência de saída e minimizam o ripple na saída CC. Eles são capazes de conduzir corrente durante todo o ciclo da onda CA, condição que permite uma saída mais suave e controlável, por meio do uso de dispositivos semicondutores (Barbi, 2006).
Segundo Mohan, Undeland, Robbins (2003), ponte de Graetz pode ser interpretada como a associação série de dois retificadores trifásicos de 3 pulsos. A característica série deste retificador resulta em tensão CC duas vezes maior do que a obtida com o retificador de meia onda. A perfeita simetria das correntes em todos os enrolamentos e linhas é uma das razões pelas quais este retificador é tão popular.
FIGURA 9. RETIFICADOR DE ONDA COMPLETA MONOFÁSICO CONTROLADO A TIRISTORES MONTADO NO EMTDC/PSCAD.
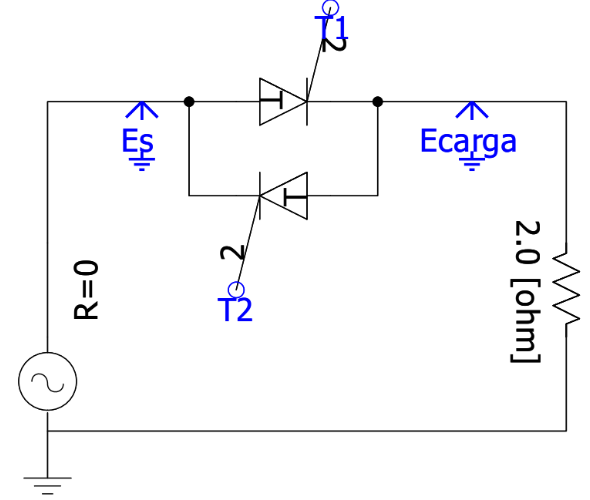
FIGURA 10. FUNCIONAMENTO DO RETIFICADOR DA FIGURA 9.
Fica claro que retificadores controlados por comutação de linha são usados para transferência controlada de energia entre a frequência de linha CA e a CC de magnitude ajustável. Ao controlar o ângulo de atraso dos tiristores, uma transição suave pode ser feita do modo de retificação para o modo de inversão ou vice-versa. A tensão do lado CC pode inverter a polaridade, mas a corrente do lado CC permanece unidirecional (Mohan, Undeland e Robbins, 2003)
Adicionalmente, os conversores controlados por fase introduzem harmônicos no sistema elétrico de serviços utilitários. Em níveis reduzidos de tensão de saída, quando comparados ao seu valor máximo possível, eles apresentam um baixo fator de potência, enquanto também geram imperfeições na forma de onda da tensão de linha.
Os retificadores trifásicos de onda completa são muito utilizados em aplicações até 120 kW, enquanto os conversores modulares multiníveis possibilitam o emprego de altas potências (Rashid, 2014), conforme será apresentado na próxima seção.
2.4.2 Conversor Modular Multinível
Em aplicações de média tensão que demandam megawatts de potência, surge a necessidade de associação de componentes quando os valores de tensão ou corrente exigidos ultrapassam a capacidade de um único dispositivo (Braga e Barbi, 2000).
A técnica de associação de conversores, seja em série ou em paralelo, envolve a distribuição da tensão ou corrente total de um conversor, geralmente um inversor, entre diversos conversores menores. Em certos casos, é até possível obter níveis intermediários de tensão ou corrente que permitem a síntese de uma forma de onda alternada em degraus, com baixa distorção harmônica para acionar motores CA.
Essa configuração das formas de onda em degraus suaves, também conhecida como multiníveis, minimiza os efeitos sobre o torque da máquina em comparação com acionamentos que utilizam uma simples onda quadrada. O termo “multinível” foi cunhado para descrever esses níveis intermediários de tensão em conversores, segundo Braga e Barbi (2000).
O conceito dos conversores multiníveis teve início em 1975, quando surgiu o conversor de três níveis. Com o passar do tempo, diversas topologias foram desenvolvidas.
Segundo Rashid (2011), os conversores multiníveis não apenas atingem altas potências, mas também possibilitam a integração de fontes de energia renovável, como fotovoltaica, eólica e células de combustível, em aplicações de alta potência.
Ainda segundo o autor, a ideia fundamental, por trás dos conversores multiníveis, é utilizar várias chaves semicondutoras de potência em conjunto com múltiplas fontes de tensão CC para sintetizar forma de onda de tensão em escadas, alcançando maior tensão resultante. Diferentes fontes, como capacitores, baterias e fontes de energia renovável, podem ser empregadas como essas fontes de tensão CC.
O CMM é adequado para aplicações de alta tensão ou alta potência e, portanto, é adequado para transmissão HVDC. No caso de altas potências, o CMM é preferível se comparado a uma série de conversor (Rashid, 2011).
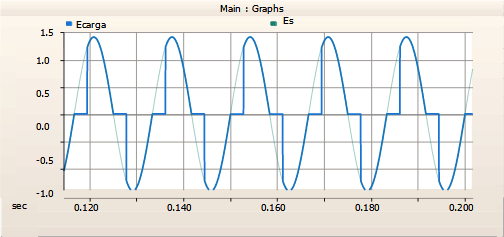
FIGURA 11. TOPOLOGIA BÁSICA DE UM CMM TRIFÁSICO.
Segundo Rashid (2011), cada ramo da Figura 12 é composta por n submódulos, que são compostos por duas chaves autocomutadas e um capacitor de armazenamento. Dependendo da aplicação, um submódulo de ponte completa pode ser necessário em vez da meia ponte.
O submódulo pode ser visto como uma fonte de tensão com dois estágios possíveis 0 ou Vc, onde Vc é a tensão sobre o capacitor. Assim, cada ramo pode ser entendido como uma tensão controlável com n possíveis passos de tensão, e quanto maior o número de submódulos, mais aproximada a forma de onda senoidal pode ser alcançada no lado CA.
Além disso, o CMM pode ser conectado diretamente ao sistema de energia, ou seja, sem qualquer transformador de potência, o que pode reduzir a área ocupada e o custo geral da subestação, resultando, por exemplo, em uma subestação HVDC de área compacta (Allebrod, Hamerski e Marquardt, 2008).
Embora esses conversores possam operar em frequências de comutação fundamentais e altas, onde frequências de comutação mais baixas geralmente resultam em menor perda de comutação e maior eficiência, eles apresentam algumas desvantagens, como maior número de chaves semicondutoras de potência.
Mesmo que essas chaves tenham classificação de tensão mais baixa, cada interruptor exige um circuito de acionamento, resultando em sistema com maior complexidade e maior custo.
O CMM é capaz de equilibrar cada nível de tensão, independentemente das características da carga, seja para conversão de energia ativa ou reativa, e isso pode ser feito automaticamente, sem a necessidade de assistência de outros circuitos, independentemente do número de níveis.
Maior modularidade, redundância e capacidade de tolerância a falhas oferecem benefícios significativos à topologia CMM (Thantirige, et al., 2015; Spichartz, Staudt e Steimel, 2013).
No entanto, o principal desafio enfrentado pela utilização do CMM como conversor de acionamento é a flutuação CA das tensões do submódulo que contém um capacitor flutuante em vez de um capacitor isolado. Isto é particularmente grave em operações de baixa velocidade e alto torque. Portanto, estratégias de controle mais complicadas são necessárias para resolver problemas de equilíbrio de tensão CC e para controlar o fluxo de correntes circulantes dentro das células (Spichartz, Staudt e Steimel, 2013).
A qualidade da energia é crucial onde a THD é um dos principais indicadores de qualidade de energia. A técnica de modulação desempenha um papel fundamental na determinação da qualidade da potência gerada pelos CMM.
Adicionalmente, uma variedade de técnicas de modulação e de controle foram desenvolvidos para conversores multiníveis, incluindo modulação a SPWM, modulação por eliminação seletiva de harmônicos, modulação por vetor espacial e outras.
Embora os conversores CMM ofereçam qualidade excepcional de forma de onda, design modular compacto e alta densidade de potência, é importante observar que esses conversores envolvem projetos e controles complexos (Mahdi, Hoff e Østrem, 2022).
Os CMM ganharam destaque em sistemas de propulsão elétrica de alta potência em veículos pesados e aeronaves, devido ao aumento contínuo na tensão do sistema elétrico acima de 400 V e da necessidade de reduzir perdas de condução, massa e volume do equipamento.
De acordo com Steinsland, et al. (2020), o uso de CMM com múltiplos níveis de tensão demonstrou resultados promissores na conversão de baixa tensão CA para a rede elétrica em navios totalmente elétricos, mantendo a qualidade da tensão mesmo em situações de carga escalonada, rejeição de carga e cargas desequilibradas, devido às suas excelentes características, como capacidade de manipular tensões mais altas e produzir energia de saída de alta qualidade.
2.4.3 Conversores Ressonantes e de Comutação Suave
Segundo Rashid (2011), na década de 1980, as pesquisas da época focaram em incorporar aos conversores tanques ressonantes e cria formas de onda senoidais de tensão e/ou corrente, permitindo ZVS ou ZCS para interruptores de potência
O tanque ressonante é composto por um capacitor ressonante e dois indutores, em série com o capacitor e o transformador, e o indutor de magnetização, em paralelo. A função do tanque é filtrar os harmônicos da onda quadrada, emitindo uma onda senoidal na frequência de comutação fundamental para a entrada do transformador (Hudson, 2022).
Segundo Rashid (2011), esses conversores ressonantes são capazes de operar com frequências de comutação de centenas de quilohertz, reduzindo o tamanho dos componentes magnéticos e aumentando a densidade de potência. No entanto, eles apresentam perdas de condução elevadas e podem requerer modulação de frequência para regulação de saída.
No final da década de 1980 e na década de 1990, surgiram os conversores de comutação suave, combinando características dos conversores PWM convencionais e ressonantes, com formas de onda suavizadas. Eles resolvem o problema das altas frequências de chaveamento, evitando transições simultâneas de tensão e corrente.
Por outro lado, os QRC, considerados híbridos, combinam elementos de conversores ressonantes e PWM, por meio de substituição da chave liga/desliga por uma chave ressonante. Essa condição permite que conversores convencionais sejam adaptados e possam ser considerados como equivalentes ressonantes, os quais geram formas de onda quase senoidais para alcançar ZCS e/ou ZVS.
Com adaptações simples, muitos circuitos integrados de controle dedicados projetados para conversores convencionais podem ser empregados em conversores com comutação suave, conforme observado no projeto de um conversor Buck ressonante apresentado por Bettoni, Pediatidakis e Lima (2017).
Segundo Rashid (2011), os conversores ressonantes ganharam destaque devido à comutação suave, alta densidade de potência, eficiência e redução de EMI. Os conversores de comutação suave operam com ressonância controlada, criando condições ZVS e ZCS, equiparados a PWM convencional com modificações simples. Eles podem operar em frequências muito altas, suprimindo EMI, sendo aplicáveis a conversores CC-CC, CA-CC e CC-CA. No entanto, ainda requerem mais pesquisas para aplicações em navios de acordo com Mahdi, Hoff e Østrem (2022).
Em última análise, os autores supracitados afirmam que o avanço contínuo na eletrônica de potência continuará a impulsionar o desenvolvimento de novas topologias e aprimoramentos nas existentes.
A escolha da topologia depende das necessidades específicas da aplicação, sendo que o sucesso desta escolha dependerá da compreensão profunda dos requisitos da aplicação e da capacidade de equilibrar eficiência, qualidade do sinal e complexidade de projeto.
3 METODOLOGIA
Este capítulo apresenta a classificação da pesquisa quanto aos fins e meios, segundo Botelho e Cruz (2013), além de suas limitações e registros dos dados coletados para posterior análise.
3.1 Classificação da Pesquisa
Este trabalho empregou uma abordagem qualitativa através de visitas ao navio analisado e observação de dados empíricos dos conversores empregados. A fim de se aprofundar no estudo, esta abordagem permite que o pesquisador mantenha um contato direto com o objeto da pesquisa.
3.1.1 Quanto aos Fins
Para atingir os objetivos pretendidos, optou-se por uma pesquisa descritiva que envolve a busca, a compreensão, registro e análise de fenômenos, bem como o estabelecimento de relações entre variáveis. Sua principal característica reside na aplicação de métodos padronizados de coleta de dados, como observação sistemática.
Desta forma, este trabalho visa ressaltar a importância da modernização dos conversores e a necessidade do contínuo aprimoramento dos usuários, através da análise e exposição das características presentes em conversores de energia, bem como uma coleta de dados de equipamentos reais.
3.1.2 Quanto aos Meios
Este trabalho utilizou a técnica de pesquisa bibliográfica, sintetizando artigos, monografias e livros, como Power Electronics Handbook do autor Muhammad H. Rashid e Power Eletronics Convertes, Applications and Design dos autores Ned Mohan, Tore M. Undeland e William P. Robbins, entre outros.
Ainda foram utilizados documentos cedidos pela MB no que tange ao funcionamento de alguns equipamentos, como por exemplo manual de fabricantes, livros históricos e relatórios sobre acontecimentos, caracterizando assim uma pesquisa documental.
Estes forneceram medidas reais dos conversores existentes, auxiliando no alinhamento entre a teoria e a realidade.
Além destas pesquisas, cabe salientar a pesquisa experimental que, por meio do software de simulação de sistemas eletrônicos de potência, Electromagnetic Transients including DC/Power System Computer Aided Design (EMTDC/PSCAD), permitiu a simulação controlada de circuitos baseados em dados de equipamentos e situações reais.
3.2 Limitação do Método
Este trabalho combina teoria e simulações com dados empíricos, de forma a mitigar algumas das limitações associadas às simulações isoladas. Alguns dos principais desafios incluem a simplificação e capacidade de aplicar os resultados da simulação em cenários do mundo real, devido a escolha das topologias e componentes eletrônicos ideais que podem não se traduzir diretamente para situações reais, reduzindo a validade externa.
Compreender as simplificações e suposições e considerar como os resultados se aplicam ao mundo real são aspectos importantes para a interpretação deste estudo.
3.3 Registro de Dados e Pesquisa de Campo
A fim de possibilitar compreensão a nível macro do efeito das tecnologias de eletrônica de potência abordadas sobre os equipamentos de um meio naval, foram realizadas visitas a um navio da MB e observações sistemáticas de maneira a permitir melhor análise dos dados coletados.
Neste capítulo serão apresentados alguns aspectos do navio da MB analisado como características do seu sistema de distribuição de energia, suas fontes secundárias, e, em paralelo, serão exemplificados alguns de seus conversores.
Ademais, será apresentado um estudo de caso sobre uma unidade transformadora retificadora (UTR) que não conseguiu atingir a demanda necessária de corrente quando tentou realizar a partida de uma aeronave embarcada. Para atingir este fim serão apresentadas nesta seção algumas aeronaves que operam com o navio analisado.
3.3.1 Sistema de Geração e Distribuição de Energia do Navio Analisado
A construção do navio analisado ocorreu na segunda metade da década de 1970, construído no Brasil com tecnologia inglesa. Naquela época, essas embarcações representaram destacado avanço de aplicação tecnológica quando comparadas à maioria dos navios, que eram predominantemente contratorpedeiros utilizados durante a Segunda Guerra Mundial. A seguir, são apresentadas as características de construção e operação deste navio:
a) Dimensões: 130 metros de comprimento, largura máxima de 13,59 metros e calado de cerca de 6 metros;
b) Deslocamento: com carga máxima, 3750 toneladas;
c) Propulsão: utiliza o sistema CODOG (Combined Diesel or Gas), composto por 2 TG Rolls-Royce Olympus TM3B, cada uma com potência de 28.000 kW, conectadas a dois eixos de propulsão. Além disso, conta com 4 motores de combustão da empresa MTU, com potência nominal de 4.000 kW, cada um, acoplados aos mesmos dois eixos, completando o conjunto de 1 turbina e 2 motores de combustão por meio de uma caixa de engrenagens para cada eixo de propulsão;
d) Energia Elétrica: 4 geradores de corrente alternada, modelo MTU, cada um com 1.000 kW de capacidade; e
e) Velocidade: a velocidade máxima projetada para o navio é de 32 nós.
Ao longo de sua vida útil, esse navio passou por avaliações e manutenções, de forma que diante da constatação de deficiência operacional ou de falha dos sistemas de bordo, foram realizadas ações de modernização e atualização em seus sistemas de navegação, armamento, sensores e maquinaria.
A configuração da rede elétrica a bordo do navio pode ser caracterizada como segregada do sistema de propulsão, com topologia radial e tensões de distribuição em corrente alternada e contínua.
Embora a rede elétrica não esteja diretamente conectada para alimentação dos equipamentos de propulsão da embarcação, há conexão da referida rede com sistemas auxiliares da propulsão, como exemplo para alimentação de bombas de lubrificação, bombas de óleo combustível, painéis de comando e de controle dos MCP, sistema de ar comprimido e ao SCMPA (Sistema de Controle de Máquinas e Propulsão Avançada), entre outros.
Além disso, a topologia radial, por meio de uso de circuitos de conexão entre quadros elétricos, permite que qualquer dos geradores possa ser usado como fonte de energia para as cargas de bordo.
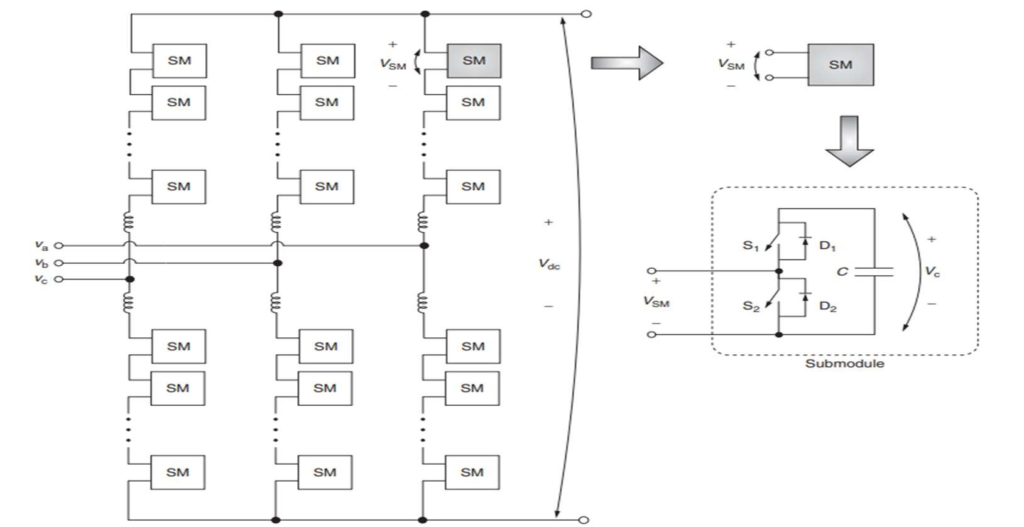
O navio é equipado com 4 geradores idênticos, cada um deles acionado por um motor de combustão auxiliar (MCA), Figura 12. Os detalhes específicos de cada gerador podem ser encontrados no Quadro 1.
QUADRO 1. DADOS DA PLACA DO GERADOR.
Informações Dados Fabricante Laurence, Scott & Electromotors Potência nominal 1.000 kW Tensão nominal de linha 450 V Corrente máxima 1.605 A Frequência 60 Hz Nº de fases Trifásico e sem neutro
Fonte: Elaborado pelo autor com base nos dados de Laurence, Scott & Electromotors Ltd (1978).
FIGURA 12. CONJUNTO MOTOR-GERADOR.

Há grande versatilidade e flexibilidade na planta elétrica, sendo possível que todos os geradores operem simultaneamente, cada um fornecendo energia a uma seção ou ainda podendo operarem dois em paralelo. As diferentes configurações na condução operacional da planta variam conforme a necessidade de carga e estão previstas em manuais de procedimentos operativos.
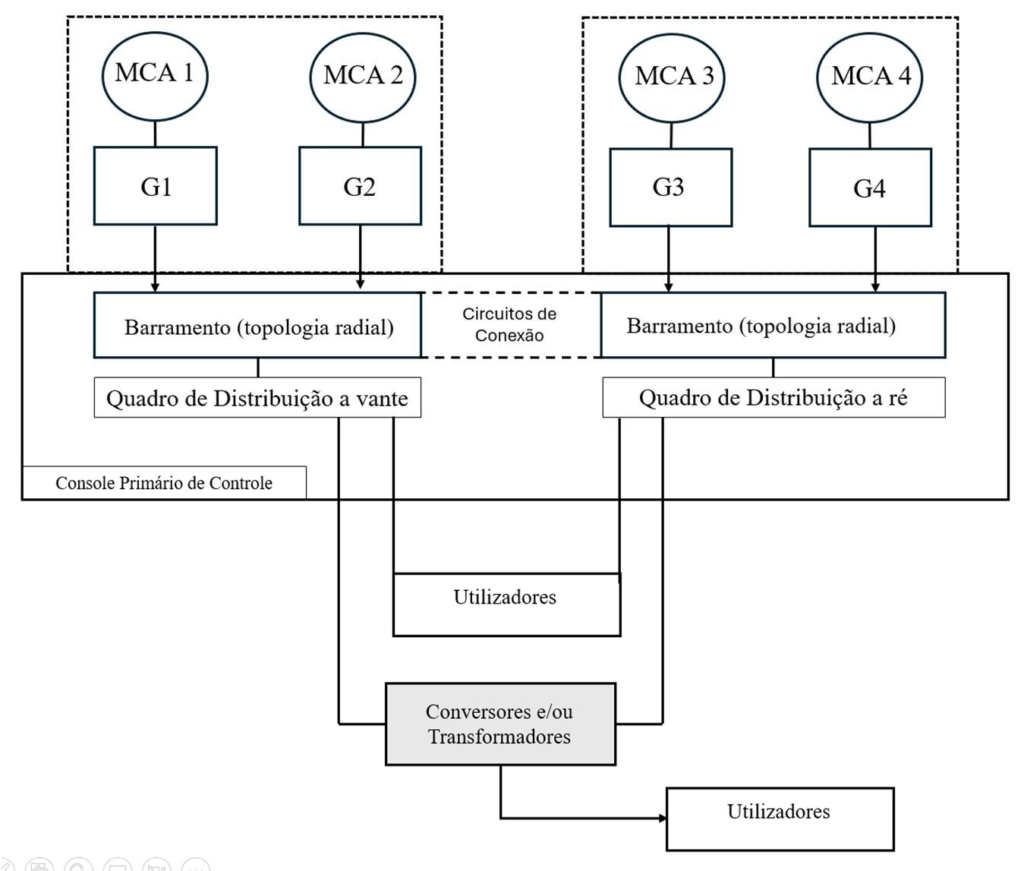
O sistema é controlado e operado remotamente pelo console primário de controle, o qual possui meios para realizar operação dos geradores e manobra dos disjuntores, partida dos MCA, ajustes de frequência, paralelismo entre geradores e procedimentos operativos, como redução de carga em emergência, além de possuir dois consoles secundários localizados nos centros de carga.
A alimentação principal do navio é de 450 V, trifásico e 60 Hz, cuja função é alimentar diretamente as principais cargas e as demais por meio de transformadores abaixadores para as tensões de 115 V/60 Hz, trifásico e monofásico, e 220 V/60 Hz, monofásico, conforme Figura 13 que apresenta um esquema simplificado da planta elétrica.
Os transformadores abaixadores trifásicos e monofásicos de 115 V/60 Hz suprem a iluminação principal, feita por lâmpadas LED, equipamentos menores e estações de conforto da tripulação.
Já os abaixadores monofásicos de 220 V/60 Hz não são de projeto e foram inseridos ao longo da vida útil do navio, tendo a função de alimentar equipamentos relacionados ao conforto da tripulação e à rotina administrativa, como eletrodomésticos dos salões de recreio.
FIGURA 13. PLANTA ELÉTRICA DO NAVIO.
As características mais significativas da rede elétrica a bordo são redundância e integração dos equipamentos. Os equipamentos vitais ou de maior importância operativa possuem alimentações provenientes de quadros de distribuição diferentes, com transferência automática ou manual, dependendo do grau de importância para o navio.
Outrossim, em casos de falhas de alimentação, muitos equipamentos possuem métodos de partida, lubrificação e arrefecimento alternativos, de forma a se manterem operacionais. O navio também possui redundância de sistemas em boa parte dos equipamentos vitais, iluminação e bancos de baterias.
Além das fontes principais, acima citadas, há também fontes secundárias para suprimento de energia, devido à complexidade dos navios, serão apresentadas neste tópico parte das fontes secundárias instaladas como conversores, bem como inversores e unidades transformadoras e retificadoras que suprem as demandas de energia para funções específicas.
A carga analisada possui conversores para conversão da alimentação principal em 115 V/400 Hz, monofásico, para os sistemas de combate, sistema síncrono de distribuição de informações, sistema de armas, sensores do navio e para a agulha giroscópica.
Este sistema ainda possui dois motores geradores Westinghouse tipo F7466, Figura 14, dois painéis de comando para cada motor e um painel de seleção de operação, sendo que um permanece operando em normal, enquanto o outro fica em stand by. Entretanto, a seleção do grupo conversor que estará em operação e qual estará em stand by não é automática. No Quadro 2 estão mais algumas características deste equipamento datado de 1975.
Semelhante aos sistemas que fazem a conversão 450 V/60 Hz para 115 V/400 Hz, existem 2 sistemas que realizam a conversão para 200 V/400 Hz, monofásica, Figura 15, e são empregados na alimentação dos computadores de bordo.
FIGURA 14. CONVERSOR 115 V-400 Hz
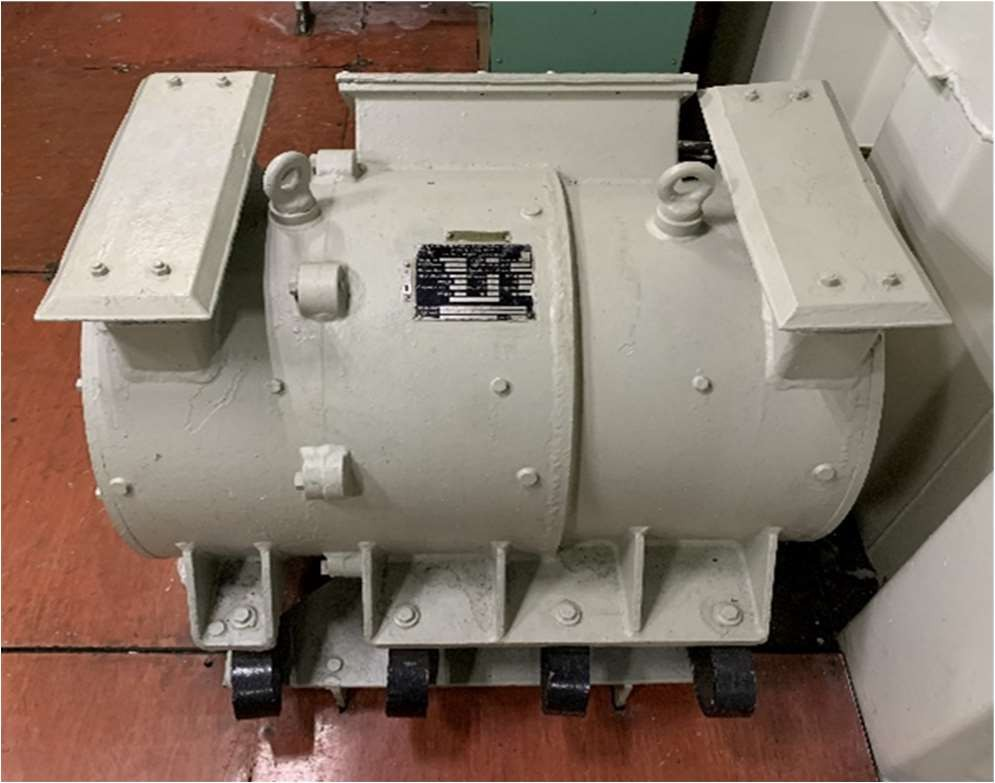
FIGURA 15. CONVERSOR 200 V-400 HZ.

QUADRO 2. DADOS DE PLACA DO CONVERSOR 115 V-400 HZ.
Informações Dados Fabricante Laurence, Scott & Electromotors Entrada/saída nominal 440 V/115 V Frequência de entrada/saída 60/400 Hz Corrente de partida 185 A RPM 1.200 Nº de fases Monofásico Capacidade e fator de potência 15 kVA e 0,8 atrasado
Fonte: Elaborado pelo autor com base nos dados de Laurence, Scott & Electromotors Ltd (1978).
Na carga analisada existem algumas UTR, ou como comumente são conhecidas Transformer Rectifier Unit (TRU), sua função geral é fornecer uma fonte de alimentação estável e adequada para dispositivos e sistemas que operam com CC, convertendo eficientemente CA da rede elétrica em CC.
As UTR também possuem circuitos de proteção, como fusíveis e dispositivos de proteção contra curtos, para proteger tanto a unidade quanto os dispositivos conectados contra sobrecorrentes e picos de tensão.
O navio analisado possui dois destes equipamentos da marca Westinghouse tipo 6587B que operam convertendo 440 V/60 Hz para 24 V/60 Hz empregados para alimentar equipamentos específicos, como alarmes e iluminação de painéis, e os demais sistemas de controle e automação de bordo, através do quadro de distribuição de baixa tensão (QDBT).
Os equipamentos vitais que possuem esta alimentação, assim como os compartimentos que possuem iluminação de emergência, recebem a alimentação proveniente de um grupo de baterias, em caso de falhas das duas UTR.
A alimentação dos circuitos vitais e dos não vitais define as duas seções de distribuição: uma chamada “seção mantida” e a outra “não mantida”. Durante a operação normal do sistema apenas uma UTR alimenta todo o QDBT, ficando a outra UTR de reserva e o sistema/grupo de baterias em flutuação.
A seleção das UTR não é automática, bem como o acionamento do grupo de baterias. Ocorrendo a falha de uma UTR, o grupo de baterias supre a “seção mantida” do QDBT, até ser selecionada a outra UTR, ou por 30 minutos, caso essa seleção não ocorra.
QUADRO 3. PARÂMETROS ORIGINAIS DA UTR DE 24 V.
Informações Dados Fabricante Laurence, Scott & Electromotors Voltagem de saída 26 V/27 V/32 V (+- 1.5%) Corrente máxima 230 A Capacidade 5.5 kW Corrente máxima de entrada 2 A Perda sem carga 600 W Perda com carga máxima 1200 W Rendimento com carga máxima 83%
Fonte: Elaborado pelo autor com base nos dados de Laurence, Scott & Electromotors Ltd (1978).
A alimentação para a UTR é controlada por meio de um contator comandado por uma chave de três posições (Local – Off – Remote). Quando a chave é posta em remote o contator é controlado do quadro de distribuição.
O circuito é protegido por fusíveis de 300 A e relés de sobrecarga, sendo o rearme destes relés feito manualmente por um botão instalado na parte frontal da UTR. Analisando os parâmetros é possível observar 3 níveis de voltagem de saída general (26 V para seção não mantida), normal (27 V utilizados nas seções mantidas, não mantidas e parte mantendo as baterias em flutuação) e boost (32 V de saída para carga total nas baterias), que podem ser variados pela mudança da chave seletora de voltagem da saída.
FIGURA 16. UTR DE 24 V.

Possui ainda, uma UTR que retifica uma tensão de entrada de 440 V para 28 V para uso na partida e manutenção de aeronaves, além de possuir um conversor 200 V/400 Hz exclusivo para o emprego destas manutenções, semelhante ao da Figura 15. O funcionamento da UTR de 28 V será discutido na próxima seção.
FIGURA 17. UTR DE 28 V.

A Figura 18 apresenta um equipamento um pouco mais modernizado do que os analisados. A tensão 440 V/60 Hz, trifásica, gera uma tensão de saída senoidal 115 V (Fase- Fase) ou 66 V (Fase-Neutro), trifásica, 400 Hz, modelada a partir da tecnologia PWM em alta frequência produzindo uma potência nominal de até 5 kVA. Através de IGBT atingem um rendimento maior que 80% (Roberto, 2022).
FIGURA 18. CONVERSOR DE DUPLA CONVERSÃO.

Embora seja alimentado por uma tensão CA e entregue uma tensão CA este equipamento não é um cicloconversor, pois opera através de dupla conversão (CA-CC/CC- CA).
Este é um dispositivo usado para alimentar eletronicamente dispositivos sensíveis, como o sistema de armas, com uma alimentação elétrica confiável e livre de falhas. Ele converte a energia da fonte de alimentação CA em energia CC, em seguida, inverte novamente para CA antes de alimentar o equipamento. A principal vantagem desse tipo de conversor é a proteção contra distúrbios na rede elétrica, como quedas de tensão, picos de tensão e interrupções, oferecendo uma alimentação estável e ininterrupta aos dispositivos conectados.
A exemplo disto, este equipamento possui proteções contra sobrecorrente na entrada de alimentação alternada (fusível/disjuntor), contra sobrecorrente ou curto-circuito na saída para carga (limitação eletrônica, transformador isolador na saída para carga), contra variação de tensão e sobreaquecimento nos semicondutores de potência, através de ventilação forçada inibindo a saída e contra sub/sobretensão de saída.
Por outro lado, no que tange a alimentação CC, o navio possui compartimentos com baterias para suprir a falta de alimentação de 50 V e 24 V em caso de falta ou avaria. Existem duas UTR que retificam a alimentação principal para 50 V, Figura 19.
FIGURA 19. UTR DE 50 V.

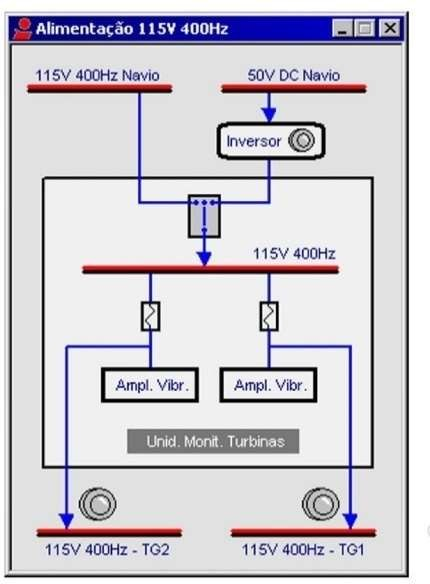
Outro equipamento analisado é um inversor, Figura 20, que provê a alimentação de 115 V/400 Hz, monofásica, exclusivamente para o controle das TG, alimentados pelas TRU de 50 V.
Através do SPWM, controla-se o tempo de comutação dos transistores IGBT criando uma forma de onda senoidal precisa que alimenta, assim, aos módulos eletrônicos de monitoramento de vibração dos geradores de gases e das turbinas de potência e as unidades de baixa tensão instaladas nos invólucros das turbinas.
Esses módulos eletrônicos ainda fazem o controle de trim, referente ao ajuste e à regulação ativa da temperatura dentro de uma faixa desejada, e o trip de temperatura, se refere à interrupção ou ao desligamento automático do sistema quando a temperatura atinge um limite crítico para proteger equipamentos e garantir a segurança.
A partir da visualização da Figura 21 é de fácil compreensão que quando as TG estiverem em funcionamento e o navio sofra uma perda da alimentação direta (115 V/400 Hz) esse inversor, automaticamente, alimenta o controle da propulsão através das baterias durante um período. Seu painel é composto de chave liga/desliga, LED’s de indicação de alarmes e LED’s de indicação de falhas.
FIGURA 20. INVERSOR ESTÁTICO 115 V/400 HZ.

FIGURA 21. DIAGRAMA DE FUNCIONAMENTO DO INVERSOR ESTÁTICO 115 V/400 HZ.
3.3.2 Funcionamento da UTR de 28 V
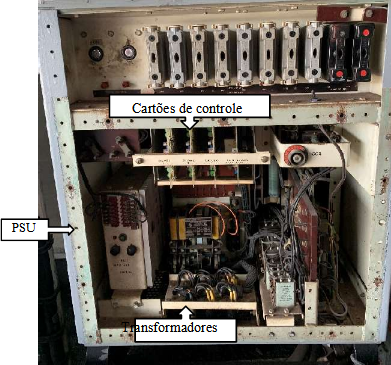
O circuito principal deste equipamento é composto por um transformador abaixador, um transformador de referência e uma unidade de fonte de alimentação (Power Supply Unit – PSU), responsável por gerar uma tensão de referência comparada com a tensão de saída em uma unidade de controle de alarme de sobretensão (Control and Over Volt Alarm Unit – COVA).
A PSU consiste em duas fontes de alimentação idênticas alimentadas por um transformador de rede que fornece 15 V ou 0 V, estabilizada em 1% sob todas as condições de fornecimento e carga.
A saída da COVA controla os pulsos que são desenvolvidos em três unidades de acionamento alimentadas pelos transformadores de referência. Esses pulsos são amplificados e aplicados aos tiristores para fornecer uma medida de controle sobre a tensão de saída. Na COVA há, ainda, um circuito de proteção contra sobretensão que desligará o UTR caso a saída suba acima de um nível predefinido.
Todos os componentes do equipamento apresentado são montados dentro da estrutura da caixa, Figura 22, sendo três unidades de placas driver e uma placa COVA, todas plug-in removíveis. Um relé de sobrecorrente é instalado na unidade para proteção, uma vez desarmado deve ser reinicializado manualmente. Um recurso de deteção remota de tensão está disponível caso seja necessário compensar a queda de tensão de saída.
FIGURA 22. UTR ABERTA.
O transformador abaixador recebe a tensão de 440 V e fornece a tensão de 26 V ao retificador controlado por tiristores, SCR, de onda completa trifásico com 6 controladores de nível de tensão de saída, bem como aos transformadores de referência. Os tiristores estão bloqueados totalmente nesta fase.
Um indutor e dois capacitores estão presentes na saída para suavizar a tensão, enquanto resistores são fixados para garantir a estabilidade e velocidade de resposta inferior as condições de carga.
A COVA compara uma proporção da saída TRU com a saída estabilizada de +15 V da PSU e qualquer diferença causará uma saída do amplificador diferencial na COVA para mudar. Esta saída é na forma de uma tensão de controle e é alimentada por três circuitos do driver para alterar o ângulo de disparo dos tiristor.
A fase do pulso em relação ao suprimento é regulada pela tensão de controle do amplificador diferencial na COVA. Cada tiristor é alimentado por uma unidade de amplificador separada para fins de isolamento e para fornecer suprimentos de gating sem interferência de alta corrente.
Sob condições de estado estacionário, a tensão de controle do amplificador diferencial na COVA é de aproximadamente – 9 V. Se, por exemplo, a tensão de saída TRU cair devido ao aumento da carga ou à redução da tensão de alimentação, a tensão de controle fica mais negativa.
A Figura 23 apresenta um diagrama de blocos que facilita o entendimento do funcionamento do equipamento descrito anteriormente.
FIGURA 23. DIAGRAMA DE BLOCOS DA UTR.
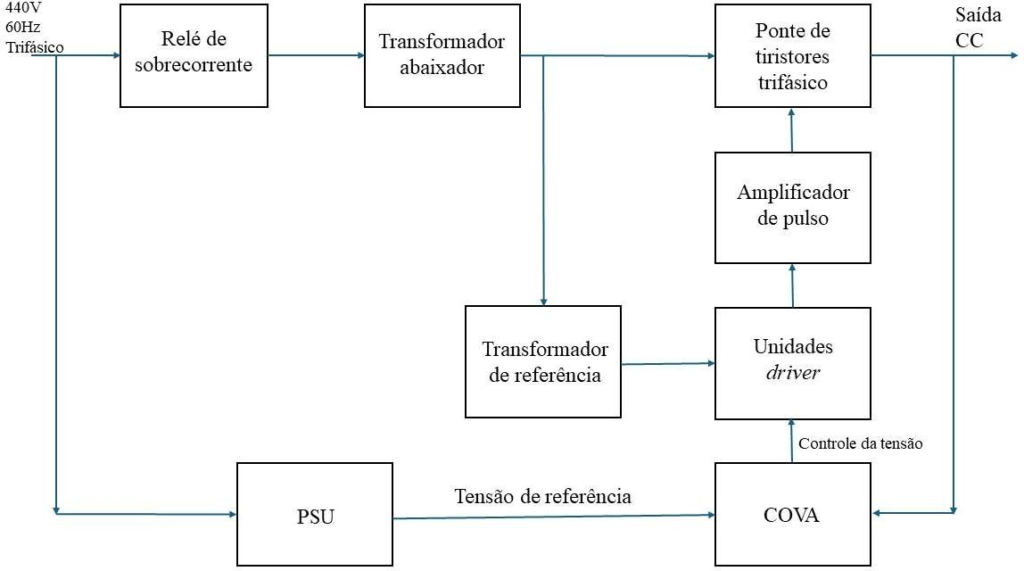
Os pulsos dos drivers são avançados para o disparo do tiristor próximos do início do ciclo, portanto, aumentando a tensão de saída. Por outro lado, uma alta tensão de saída iniciaria o retardamento dos pulsos de disparo.
De acordo com o manual do fabricante, esse equipamento proporciona uma corrente de saída intermitente com pico de 1.200 A, com quedas saindo para 225 A em 15 s, período no qual está disponível para a partida da aeronave embarcada, sendo que a tensão de saída não cai abaixo de 23 V. Ressalta-se que quando a carga de pico chegar a 1.200 A, haverá controle insuficiente para manter a tensão de saída em 28,5 V e, posteriormente, cairá para cerca de 25,5 V.
Até oito partidas podem ser feitas em um período de meia hora, desde que seja permitido um intervalo de resfriamento de três minutos entre cada par de partidas. Alternativamente, a tensão de saída pode ser reduzida para 18 V para lavagem do compressor, permitindo que uma corrente de pico de 750 A caia para zero em 20 s. Seis partidas do compressor podem ser feitas em intervalos de um minuto a cada meia hora.
A energia das unidades eletrônicas é controlada por relés, que permitem que as fontes de alimentação de 15 V se estabilizem antes da ponte do tiristor. Torna-se operacional, evitando o disparo espúrio dos tiristores.
Qualquer pequena variação da tensão de saída do TRU causará uma pequena mudança de potencial na entrada para o amplificador. A saída do amplificador aumentará ou diminuirá para alterar o ângulo de disparo dos tiristores, reduzindo a entrada do amplificador a zero novamente.
O circuito básico é mostrado na Figura 24 na forma de um retificador de onda completa controlada por tiristores em um circuito trifásico.
FIGURA 24. RETIFICADOR DE ONDA COMPLETA TRIFÁSICO CONTROLADO A TIRISTORES MONTADO NO EMTDC/PSCAD.
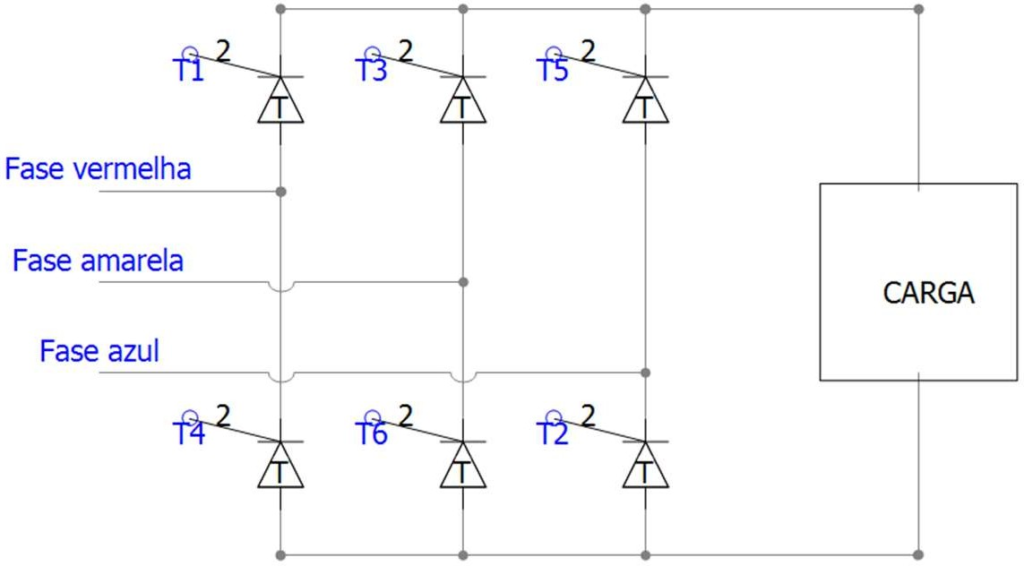
Sua operação pode ser considerada semelhante, em princípio, à de um retificador trifásico convencional, cujo elemento conduz enquanto tem a maior tensão de avanço em seu circuito e em que a corrente comuta de fase para fase em sequência rotacional.
A substituição de tiristores por elementos retificadores fornece um meio de controle do nível de saída, já que o ponto de condução pode ser retardado em todos os elementos e, portanto, dar origem a uma saída de tensão de valor médio menor.
Os pulsos de disparo para operação do tiristor são gerados dentro dos circuitos de controle e por tempo e roteamento apropriados. Nos ângulos de disparo de baixa ordem de até 60°, a corrente que flui em qualquer tiristor é contínua e composta por dois componentes consecutivos derivados da metade dos períodos de condução dos outros dois tiristores.
Em ângulos de disparo superiores a 60°, a transferência de corrente de um tiristor para o próximo torna-se descontínua e causaria o desligamento do tiristor imediatamente após o intervalo. Desta forma, a faixa de operação do ângulo de disparo fica limitada entre 0° e 60°.
Este retificador foi projetado para operar perto da condução total em baixa tensão de rede com carga de manutenção total, de modo que na condição extrema, ou seja, tensão de rede alta sem carga, o ângulo de condução é o maior possível, desse modo mantém a ondulação da tensão de saída ao mínimo.
O Quadro 4 apresenta as características originais do equipamento supracitado. É importante observar os valores da corrente máxima de saída (1.400 A), bem como seu rendimento com carga.
QUADRO 4. PARÂMETROS ORIGINAIS DA UTR DE 28 V.
Informações Dados Fabricante Laurence, Scott & Electromotors Voltagem de saída 28,5 V Corrente máxima de saída 1.400 A Peso total 400 kg Corrente máxima de entrada 16,6 A Perda sem carga 600 W Perda com carga máxima 2.000 W Rendimento com carga máxima 81%
Fonte: Elaborado pelo autor com base nos dados de Laurence, Scott & Electromotors Ltd (1978).
3.3.3 Emprego de Aeronaves
No contexto dos teatros de operações navais atuais, um dos vetores de armas mais empregados pelas Forças Navais para a projeção de seu poder é a aeronave orgânica embarcada.
Sem controle sobre o espaço aéreo, as embarcações tornam-se vulneráveis a aeronaves de patrulha que as observam a distância e coordenam ataques. Mesmo um helicóptero equipado com mísseis antinavio e voando abaixo do alcance do radar, representa uma ameaça significativa para a esquadra. Isso vale mesmo quando a esquadra opera dentro do alcance de bases terrestres amigas, pois o tempo de resposta pode ser insuficiente para proteger os navios (FGV, 2016).
Nesse contexto e dentre as aeronaves que podem operar com o navio analisado, dois modelos serão abordados nesse trabalho o Lynx Mk21B e o UH-12.
Para garantir essa operação o navio necessita prover requisitos como hangar, unidades de suporte elétrico e deck com conectores de saída e cabos de apresto para fornecer energia a aeronave. Sendo que a TRU 28 V é o equipamento responsável por prover a demanda energética necessária para realizar a partida, lavagem dos compressores e manutenções destes meios.
A MB adquiriu nove aeronaves Lynx Mk21, denominadas Sea Lynx e designadas SAH-11, dando origem ao 1º Esquadrão de Helicópteros de Esclarecimento e Ataque Antissubmarino em 1978. Hoje, a MB opera as aeronaves Lynx Mk21B, denominadas Wild Lynx e designadas AH-11B, Figura 25, após passarem por um segundo programa de modernização no Reino Unido (Marinha Do Brasil, 2023).
FIGURA 25. AERONAVE LYNX MK21B.

Uma das principais melhorias no Lynx Mk21B é a atualização dos motores para os CTS800-4N. Esses motores proporcionam um desempenho aprimorado, especialmente em condições de alta temperatura, permitindo que a aeronave transporte uma carga útil maior e, assim, aumentando sua efetividade em missões de esclarecimento e ataque antissubmarino (Aeroflap, 2023).
O Lynx Mk21B está equipado com um cockpit de vidro que oferece vantagens significativas em termos de visibilidade e recursos de exibição para os pilotos. Além disso, a aeronave possui uma série de sistemas avançados, como um processador tático, sistema de navegação por satélite e ajuda de navegação civil, incluindo um sistema de prevenção de colisão de tráfego, além de possuir a compatibilidade total com óculos de visão noturna, tornando a aeronave apta para operações noturnas ou em condições de baixa visibilidade.
O Quadro 5 apresenta os requisitos mínimos para o sistema elétrico do Lynx Mk21B, após sua modernização da tecnologia embarcada, onde a demanda de corrente aumentou atingindo um pico de 1.500 A.
QUADRO 5. REQUISITOS PARA O SISTEMA ELÉTRICO DO MK21B.
Informações Dados Fabricante Corrente CA Corrente CC Tensão 115/200 V – 3 fases 28 V Potência 10 kVA 200 VA Frequência 400 Hz N/A Corrente de partida e pico – 1.500 A pôr 1 minuto;- 450 A contínuo – 1.500 A pôr 1 minuto;- 450 A contínuo
Fonte: Elaborado pelo autor com base nos dados de Marinha Do Brasil (2023).
O Quadro 6 apresenta os requisitos mínimos de corrente e tensão que o navio deve proporcionar ao motor T800, ressalta-se que ao fornecer uma corrente de pico de 1.500 A garante a rapidez na partida. Além destes requisitos, a demanda necessária para a lavagem dos compressores destes motores é menor do que a presente no quadro abaixo e não será abordada nesse trabalho.
QUADRO 6. REQUISITOS MÍNIMOS PARA PARTIDA ELÉTRICA DO MK21B.
Tempo Corrente CC Voltagem CC 0 s 1.500 A (pico). 17,5 V 0s até 5 s Decaimento linear de 1500 A para 800 A. 17,5 V 5 até 22 s Decaimento linear de 800 Apara 450 A. Crescimento linear de17,5 V para 20,5 V. 22 até 40 s 450 A. 20,5 V
Fonte: Elaborado pelo autor com base nos dados de Marinha Do Brasil (2023).
A partida do motor da aeronave é obtida por meio de um gerador de partida CC montado na caixa de câmbio auxiliar de cada motor. Este recebe energia da fonte de terra externa até a bateria da aeronave ou, para uma partida cruzada, da bateria da aeronave e de um gerador de partida on-line.
O gerador de partida do motor T800 é uma máquina de 300 A, escovada e enrolada em derivação, que pode produzir um torque máximo de 50 lb-ft quando alimentado com 1.700 A à 28 V.
Durante a partida do motor alimentado por uma fonte de energia externa, como o navio, essa fonte externa também alimenta todos os sistemas da aeronave. Estes percebem quaisquer variações nas características provocadas pela partida do motor. À medida que a tensão fornecida cai, alguns sistemas no Mk21B podem desligar temporariamente e reiniciar quando a tensão aumentar, embora seja considerado operação normal, as flutuações são prejudiciais às tecnologias embarcadas.
Quando a UTR não consegue atingir a demanda de partida da aeronave as baterias desta aeronave podem ser empregadas para este fim, porém sua disponibilidade de operação (horas de voo) é limitada, devido a vida útil da bateria, que tem como objetivo principal realizar procedimentos de manutenção. Neste cenário, a limitação de emprego da aeronave afeta o navio de guerra, o qual perde a capacidade de operar com esse vetor de armas.
Por outro lado, o conhecido mundialmente como AS350-BA, nomeado UH-12 na Marinha e incorporado em outubro de 1979, Figura 26, apresenta uma corrente de partida de 350 A e um pico da corrente partida CC de 450 A, valores bem abaixo dos observados no Quadro 6, proporcional aos avanços tecnológicos presentes nos meios.
Em 1980, a MB contava com seis aeronaves deste modelo, e, desde então opera com esse modelo com suas possíveis versões e as configurações os tornam verdadeiras máquinas capazes de realizar uma vasta gama de atividades (Marinha Do Brasil, 2023).
FIGURA 26. AERONAVE UH-12.

Conforme supramencionado, na próxima seção, o trabalho irá abordar um estudo de caso a respeito de um equipamento que não sofreu as modernizações necessárias para atingir novos requisitos de operação afetando, assim, o desempenho do meio naval, além de propor, por meio de simulações, um retificador trifásico com controle de corrente que se enquadra nos parâmetros do caso.
4 DESCRIÇÃO E ANÁLISE DO CASO
4.1 Descrição do Caso
Durante a execução de operações aéreas da aeronave Lynx Mk21B, o navio não obteve sucesso ao tentar apoiar sua partida, pois não conseguiu prover a demanda exigida pela aeronave.
Em um primeiro momento, foi identificado que o cabo de apresto que conectava a saída da UTR com a aeronave, embora apresentasse continuidade em suas fases, não estava fechando o circuito com a fonte. Desta forma, foi realizada a substituição do cabo que apresentava condições normais de funcionamento, Figura 27.
Porém, o problema persistiu e foi realizada pesquisa de avaria nos componentes internos da unidade transformadora, uma vez que descartou-se ser o cabo a causa do problema. Primeiramente, foi aberto o quadro de contatoras e relés para a realização de uma inspeção visual a fim de avaliar a existência de indício de queima ou avaria de componentes, Figura 28.
FIGURA 27. CABO SUBSTITUTO.

FIGURA 28. QUADRO DE CONTATORAS E RELÉS.

Após inspeção visual, observou-se que nenhum componente estava avariado e que a tensão de 28 V estava alimentando a aeronave, porém a demanda de corrente de partida não estava sendo atendida.
Por meio da utilização de um banco de cargas, diversas partidas com picos de tensão induzidos e correntes de 2.500 A foram realizadas e a corrente de saída medida era de 765 A. Sendo esta parte do problema, pois mesmo fornecendo a tensão necessária para partida o equipamento não alcançava sua amperagem nominal de 1.200 A.
FIGURA 29. CARTÕES DA UTR EM BANCADA PARA ANÁLISE DE SEUS PARÂMETROS DE FUNCIONAMENTO.

Nos cartões de pulso, drivers, e na COVA, Figura 29, foram retirados os componentes do circuito eletrônico que apresentavam valores fora de suas especificações, além de componentes avariados, como: resistores, capacitores, tiristores e os diodos de proteção da bobina do relé do circuito de retenção da contatora.
Após substituição dos componentes e novo teste com o banco de cargas foi observado que a TRU alcançou melhor desempenho em relação ao teste anterior, atingindo correntes de cerca de 1.100 A, próximo ao valor mínimo de partida da aeronave Mk21B.
Por ocasião do último teste com banco de cargas, foram realizados três tipos de testes os quais contemplavam realização de partidas em sequência com corrente apresentando queda do valor de pico para a mínima, partida com corrente apresentando alta da mínima para o valor de pico e oito partidas realizadas a cada três minutos no período de até trinta minutas, conforme orientações descritas no manual, respeitando o tempo para resfriamento do equipamento, Figura 30.
FIGURA 30. SEGUNDO TESTE REALIZADO NA UTR.

Oportunamente, quando em operações aéreas, teste com carga real, a corrente demandada pela aeronave foi de 944 A, enquanto a fonte de partida estava atingindo o valor de 1.091 A. Nesta condição, em tese, o conversor poderia ser considerado apto para operações aéreas, após as manutenções realizadas pelos utilizadores.
Esta abordagem permite a compreensão de que o conhecimento das tecnologias abordadas somadas a vivência prática dos utilizadores facilita uma primeira manutenção dos equipamentos, sendo necessário desenvolver o estudo de caso para encontrar a resolução eficaz. Diante da questão apresentada, após uma análise dos cartões de pulso, ilustrados na
Figura 31 e da exploração dos tópicos relacionados à UTR este estudo propõe a simulação de um retificador controlado capaz de cumprir os requisitos essenciais para a inicialização do Lynx Mk21B através do teste do controle de corrente.
FIGURA 31. PLACA UNIDADE DRIVER.
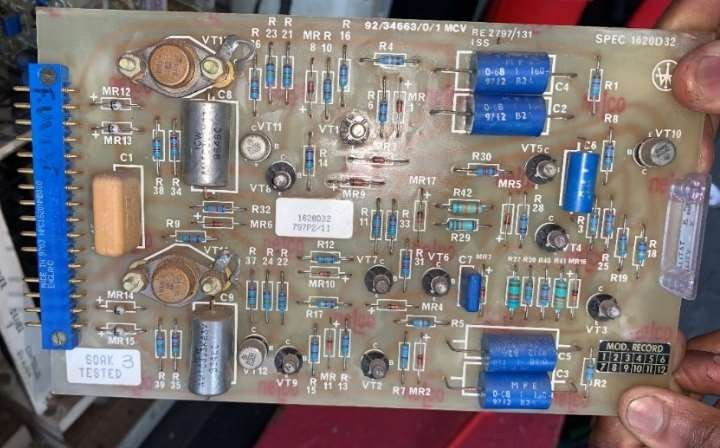
4.2 Análise do Caso
As análises detalhadas baseiam-se em cálculos matemáticos, segundo Mohan, Undeland e Robbins (2003), e encontram-se no Apêndice A.
Foi realizada análise estática que envolve observação de informações em regime permanente, sem considerar mudanças ao longo do tempo. O circuito retificador proposto apresenta topologia semelhante ao da Figura 24, acrescido das informações contidas na seção 3.3.2 e no Quadro 6.
Será considerada uma faixa de operação do ângulo de disparo semelhante à da UTR analisada na seção 3.3.2, limitada entre 0° e 60°, e para encontrar qual valor permite a condução da corrente de saída, Idc = 1.500 A, foi inserida uma resistência, uma indutância e uma fonte de tensão CC, simulando o motor de partida.
O valor da tensão da fonte CC, Ed, adotado foi igual a 28 V, assim a tensão média de saída do retificador (Vd_méd) deve ser 29,5 V.
Vd_méd = RdIdc + Ed = 0,001 ⋅ 1500 + 28 = 29,5 V. (1)
O intervalo de tensão que pode ser compensado pela variação do ângulo de disparo, dentro dos limites estabelecidos previamente pelo equipamento, e considerando a tensão de linha nominal proveniente do transformador da UTR (VL), é VL= 50,886 V para α = 60° e VL= 25,443 V para α = 0°.
O ângulo de disparo considerado de projeto foi de 20°, obtendo assim uma tensão no secundário do transformador resultante de 27,076 V

Assim, os parâmetros utilizados encontram-se na Tabela 1.
TABELA 1. PARÂMETROS DE PROJETO.
Retificador Trifásico
Tensão de entrada [V] 27,076 Tensão da fonte de tensão [V] 28 Indutância de entrada [uH] 9 Indutância da carga [mH] 0,1 Resistência da carga [mΩ] 1
Fonte: Elaborado pelo autor.
O Gráfico 1 apresenta a variação das correntes para um ângulo de disparo constante de 20°, onde é possível observar que a corrente resultante (Idc) se mantém constante próximo ao valor de 1.500 A.
GRÁFICO 1. REGIME PERMANENTE DA CORRENTES CA E CC.
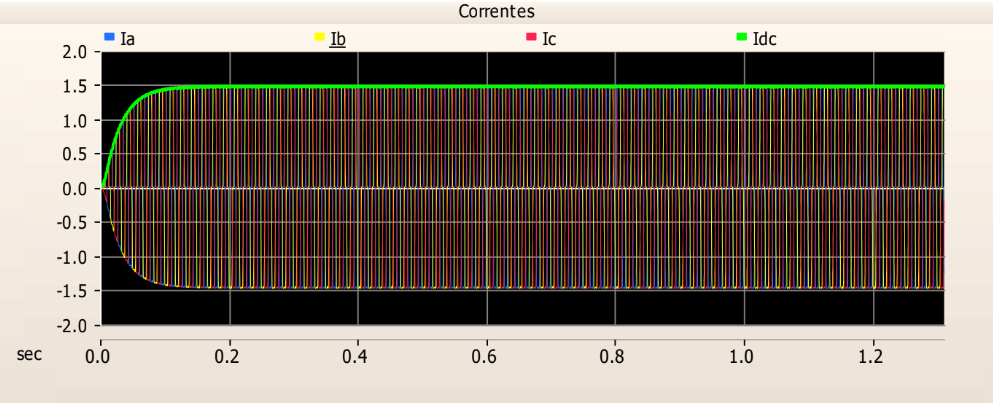
Com base nos valores obtidos na análise estática, a análise dinâmica tem como objetivo estabelecer controle da corrente de saída, regulando-a por meio da variação do ângulo de disparo dos tiristores.
Para esta finalidade, optou-se pelo uso de um controlador proporcional-integral (PI), que opera na malha de controle de corrente. A realimentação da corrente de entrada é processada por esse controlador, o qual ajusta diretamente o gate para impor a corrente desejada na entrada do circuito. O diagrama de blocos do controle da corrente Idc, incluindo o controlador PI, está representado na Figura 32.
O PI é escolhido com base na sua capacidade de fornecer controle preciso e estável, abordando tanto o componente proporcional, que responde às mudanças imediatas na corrente, quanto o componente integral, que lida com erros acumulados ao longo do tempo. Essa combinação permite a rápida resposta do sistema a perturbações e a eliminação de erros em estado estacionário (Ogata, 2010).
Para a sintonia do controlador, foi adotado o critério de eliminação de polos e tempo de acomodação de 50 ms. Detalhes sobre o equacionamento para a sintonia do controlador podem ser encontrados no Apêndice A.
Garantir a estabilidade e o desempenho eficiente de tais sistemas é de extrema importância, especialmente quando se considera o impacto dessas tecnologias em aplicações como motores de partida. A escolha dos controladores e dos parâmetros de sintonia é fundamental na operação dessas aplicações.
A eliminação de polos e o tempo de acomodação de 50 ms está relacionada à necessidade de manter a estabilidade do sistema e garantir que a corrente de saída seja controlada dentro dos limites desejados. Sendo o valor de tempo de acomodação uma escolha aceitável para rampa de frequência, o que é relevante para aplicações relacionadas a motores de partida.
FIGURA 32. DIAGRAMA DE BLOCOS DE CONTROLE DA CORRENTE NA CARGA.

4.2.1 Simulação do Retificador Trifásico
Foi utilizado o EMTDC/PSCAD 5.02 para simulação do circuito retificador. A Figura 33 mostra o circuito simulado da UTR.
FIGURA 33. SIMULAÇÃO DA UTR DE 28 V MONTADA NO EMTDC/PSCAD.
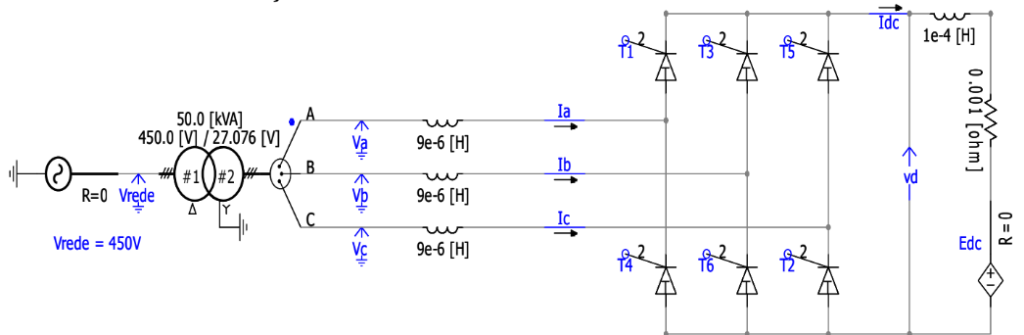
Os esquemas de ativação dos tiristores empregados são ilustrados na Figura 34, onde podemos visualizar os circuitos de disparo.
FIGURA 34. ATIVAÇÃO DOS TIRISTORES.
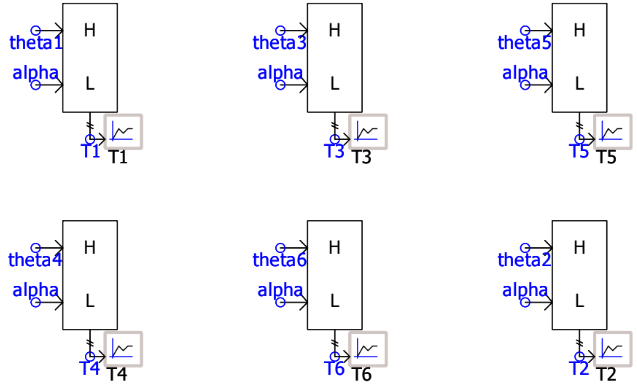
O ângulo de sincronização (theta), necessário para o funcionamento dos tiristores, foi obtido por meio do bloco phase-locked loop (PLL) do software EMTDC/PSCAD, conforme apresentado na Figura 35. Foi incluído atraso de 30° na saída do PLL para sincronizar com os ângulos de referência dos tiristores.
Segundo Teodorescu; Liserre; Rodríguez (apud Eleodoro, 2022, p. 35), o PLL é empregado para a sincronização da fase e frequência em sistemas elétricos. Devido à sua capacidade de suprimir interferências de ruído e harmônicos, é empregado em sistemas de energia, onde desempenha um papel crucial ao fornecer o sinal de referência para a rede elétrica.
FIGURA 35. BLOCO PLL.
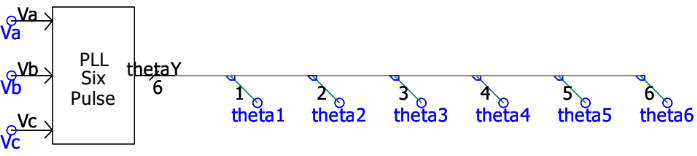
A representação do circuito de controle para a regulação da corrente em relação ao ângulo de disparo dos tiristores pode ser observada na Figura 36. Nesta figura é possível identificar, além do controlador PI, o circuito responsável por equacionar as demandas de corrente relacionadas ao tempo.
FIGURA 36. CIRCUITO DE CONTROLE DO ÂNGULO DE DISPARO.
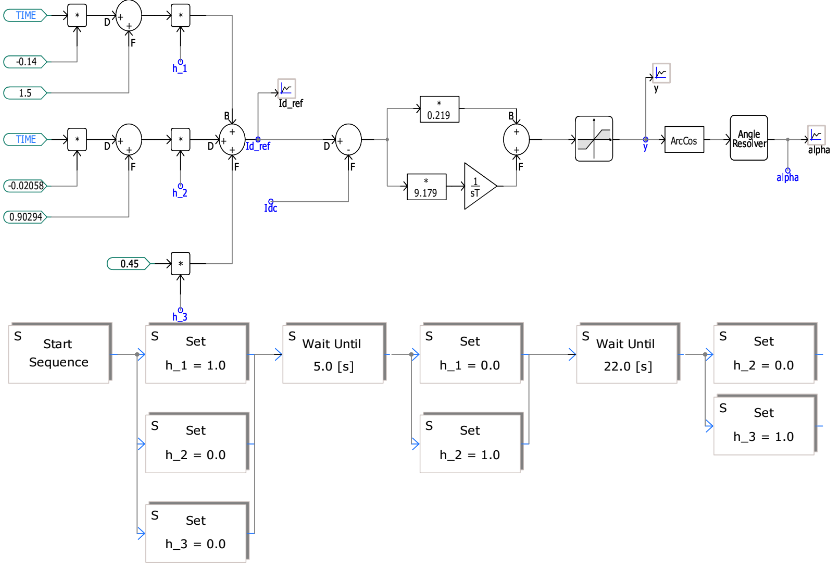
4.2.2 Resultados Obtidos
A fim de satisfazer as exigências delineadas no Quadro 6, procedeu-se à realização de modificações em componentes como na redução da resistência dos tiristores para o valor de 0,00001 Ω. Esta modificação revelou-se importante, uma vez que o valor de corrente de projeto resulta em queda de tensão significativa, o que levaria instabilidade ao modelo.
Devido à topologia utilizada, houve modulação do ângulo em comparação com a forma de onda em dente de serra do PLL e um ajuste na constante de tempo do integrador para o valor de 1s. Além disso, o uso do tiristor, devido à sua operação em baixa frequência, atende às necessidades do equipamento, eliminando a necessidade de substituí-lo por outros semicondutores mais caros, como o IGBT, que operam em frequências superiores às da rede elétrica.
A representação gráfica das correntes de controle encontra-se no Gráfico 2, na qual se destaca, com coloração verde, a curva da corrente Idc, demonstrando conformidade, em seu valor médio, com os valores especificados. Enquanto o Gráfico 3 apresenta as correntes de fase, considerando-se que a escala do eixo vertical está representada em quiloamperes.
Estas modificações conduzidas constituíram passo decisivo na busca pela concordância entre os parâmetros simulados e as especificações requeridas, conferindo, assim, confiabilidade à análise realizada.
GRÁFICO 2. CORRENTES APÓS AÇÃO DO CONTROLE.
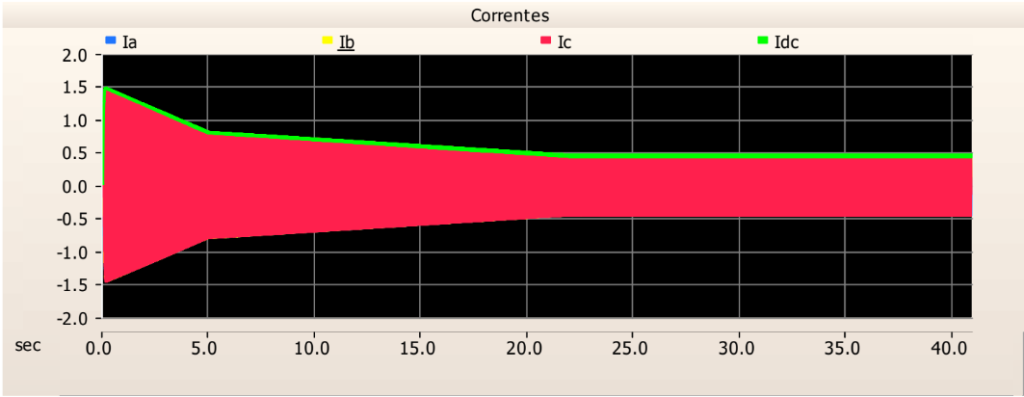
GRÁFICO 3. DETALHAMENTO DAS CORRENTES.
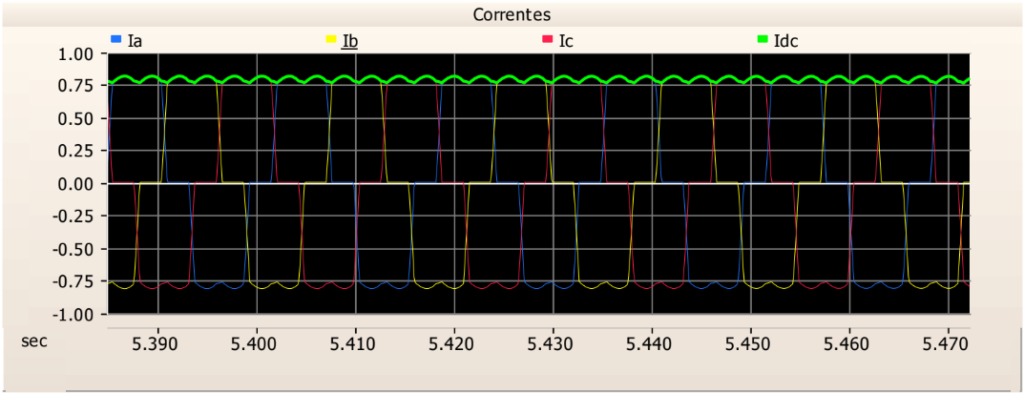
Além disso, no Gráfico 4, é possível observar que o ângulo de disparo dos tiristores permanece dentro da faixa de operação do equipamento, definida na seção 3.3.2.
GRÁFICO 4. VARIAÇÃO DO ÂNGULO DE DISPARO
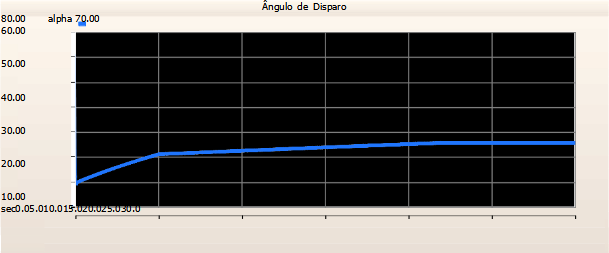
O Gráfico 5 apresenta o comportamento da corrente na carga e da corrente de referência, conforme os valores estipulados no Quadro 6, concluindo que o controle de corrente está operando satisfatoriamente.
Enquanto no Gráfico 6 é possível observar a variação da corrente durante o tempo que o sistema percorre para atingir o equilíbrio (tempo de subida), referente a 50 ms.
GRÁFICO 5. CORRENTE NA CARGA E CORRENTE DE REFERÊNCIA.
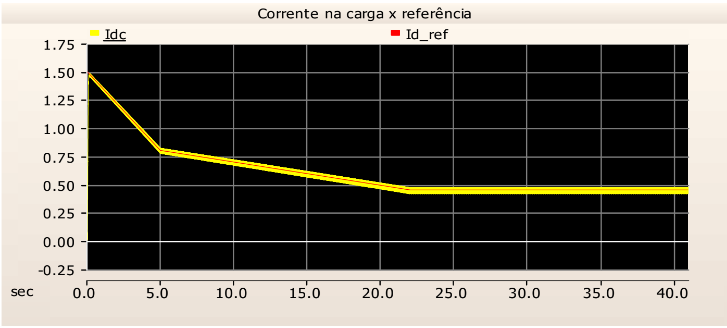
GRÁFICO 6. CORRENTE NO INTERVALO DE 0.15S.
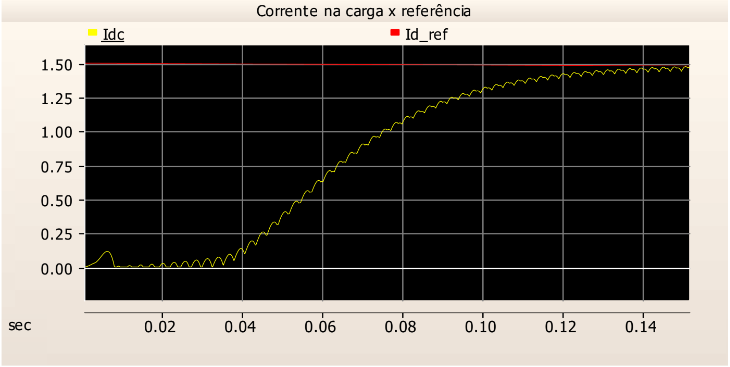
Desta forma, a simulação confirmou que, através da implementação de um sistema de controle de corrente, é viável atender de forma satisfatória aos requisitos de partida previamente estipulados.
5 CONCLUSÃO
5.1 Considerações Finais
O presente trabalho buscou ressaltar a importância de manter os navios com alto nível tecnológico relacionados aos seus conversores, exemplificando alguns dos empregos destes nos meios navais, e apresentando possíveis consequências de seu desempenho.
Ao longo do texto, foram apresentados conceitos relacionados à eletrônica de potência desde o princípio de operação de semicondutores de potência até topologias e técnicas de modulação.
Os avanços tecnológicos em sistemas de conversão de energia desempenham um papel importante no meio naval e militar, conforme destacado na referência NAVSEA’s Electric Ships Office, onde fica claro que a implementação de estratégias, prioridades e tecnologias avançadas é essencial para manter uma força naval em constante evolução.
Os dispositivos semicondutores que empregam WBG, como SiC, GaN e Ga2O3 tem apresentado grande relevância no cenário global, devido as suas características de condução e tendem a ter grande papel na indústria naval moderna.
No contexto da conversão de energia para navios e escolha da topologia a ser empregada, destacam-se características como a capacidade de manter a qualidade da tensão, mesmo sob condições desafiadoras, como carga escalonada e cargas desequilibradas, principalmente em navios totalmente elétricos.
Vale ressaltar que uma saída com baixos níveis de harmônicos e distorção, fundamental em aplicações de transmissão de longa distância com alta tensão e capacidade são fatores decisivos na escolha da topologia a ser empregada.
Por outro lado, topologias que apresentam alta eficiência e comutação suave, bem como redução de EMI, tornam-se uma escolha popular em fontes de alimentação de alta frequência, fatos estes que acarretam mais pesquisas visando seu emprego em meios navais.
O retificador de onda completa controlado é amplamente empregado, oferecendo controle da tensão de saída e minimização do ripple, impulsionados pelo seu baixo custo. De forma geral, é mais adequado para aplicações de menor frequência, devido às perdas de energia associadas à comutação frequente.
No contexto dos meios navais da MB, a frequência de operação é considerada baixa, o que elimina a necessidade de utilizar o CMM e os conversores ressonantes, enquanto os retificadores controlados de onda completa atendem adequadamente às demandas e podem proporcionar uma solução eficaz.
No que tange à pesquisa de campo, foi escolhido um navio da Marinha do Brasil que opera no ano da elaboração deste trabalho e, através de amostragem, foram apresentados alguns dos conversores utilizados e a descrição de suas características referentes aos assuntos abordados.
Seu emprego em sistemas considerados importantes para o navio cumprir sua finalidade proporciona o entendimento de que estes equipamentos são de extrema relevância para a manutenibilidade do navio.
Por fim, este estudo propôs um retificador trifásico, por meio de simulação no EMTDC/PSCAD, que atende critérios de projeto para controle de corrente, o qual poderia ser aplicado para a partida de motores de aeronaves embarcadas em navios.
Em suma, este trabalho demonstra a importância de manter a tecnologia de conversores em alto nível nos navios, destacando exemplos de aplicação e potenciais consequências para o desempenho das embarcações. A contínua inovação nesse campo é fundamental para garantir a eficiência das operações navais modernas.
Além disso, os resultados obtidos na simulação corroboram com o entendimento de que os utilizadores dos navios da MB que mantêm seus conhecimentos sobre as tecnologias abordadas constantemente atualizados têm a capacidade, apoiados do setor de engenharia responsável, de superar desafios de maneira a evitar custos elevados de manutenção.
5.2 Sugestões para Futuros Trabalhos
Como sugestão para trabalhos futuros, vislumbra-se utilizar os assuntos abordados para sugerir outra topologia de conversor com controle de corrente e de tensão para avaliar o desempenho de equipamentos que acionem motores de partida, bem como a continuidade do estudo relacionado a conversores de energia para uso nos meios navais, de maneira a identificar possibilidades de modernização dos equipamentos frente às modificações nos projetos de conversores.
Além disso, propõe-se a montagem de um protótipo para realizar pesquisas de desempenho e proporcionar o estudo de características operacionais a nível elétrico dos equipamentos, bem como atenda aos requisitos de operação de um navio de guerra, como choque, vibração, umidade, temperatura.
REFERÊNCIAS
AEROFLAP. Leonardo entrega quarto helicóptero Lynx MK21B à Marinha Brasileira. AEROFLAP, 11/02/2021. Disponível em: <https://www.aeroflap.com.br/leonardo-entrega- quarto-helicoptero-lynx-mk21b-a-marinha-brasileira/>. Acesso em: 18 jun. 2023.
ALLEBROD S., HAMERSKI, Roman e MARQUARDT, Rainer. New transformerless, scalable modular multilevel converters for HVDC-transmission. 2008 IEEE Power Electronics Specialists Conference. Rhodes, Grécia: p. 174–179, Ago. 2008.
AZIZ, Omara. SiC MOSFET vs. Si IGBT: SiC MOSFET advantages. ARROW, 18/04/2023. Disponível em: <https://www.arrow.com/en/research-and-events/articles/advantages-of-sic- mosfet-vs-si-igbt>. Acesso em: 16 ago. 2023.
BALIGA, B. Jayant. Fundamentals of Power Semiconductor Devices. 2ª Edição. Raleigh, NC, USA: Ed. Springer, Science & Business Media, 2019.
BARBI, Ivo. Eletrônica de Potência. 6ª. ed. Florianópolis, Santa Catarina: Ed. do Autor, 2006.
BETTONI, Guilherme P., PEDIATIDAKIS, Kimon S., LIMA, Michele R. H. Estudo analítico de circuitos conversores ressonantes. VII Simpósio de Iniciação Científica, Didática e de Ações Sociais da FEI. São Bernardo do Campo, São Paulo, 2017
BOTELHO, Joacy Machado e CRUZ, Vilma Aparecida Gimenes. Metodologia científica. São Paulo: Ed. Pearson Education do Brasil, 2013.
BOYLESTAD, Robert L, NASHELSKY, Louis. Dispositivos eletrônicos e teoria de circuitos. Tradução Sônia Midori Yamamoto. 11ª Edição. São Paulo: Ed. Pearson Education do Brasil, 2013.
BRAGA, Henrique A. C., BARBI, Ivo, Conversores Estáticos Multiníveis – Uma Revisão. 20 SBA Controle & Automação. v. 11, n. 01, Abr. 2000.
CARVALHO, Daniel M., PEDIATIDAKIS, Kimon S., LIMA, Michele R. H. Estudo de tiristores para a aplicação em retificadores controlados. VII Simpósio de Iniciação Científica, Didática e de Ações Sociais da FEI. São Bernardo do Campo, São Paulo, 2017
DUBUT, Jean Paul. Conversor CC/CA de alta freqüência baseado em inversores ressonantes com comutação seqüencial para excitação de uma tocha indutiva a plasma térmico. Tese (Doutorado) – Programa de Pós-Graduação em Engenharia Elétrica e de Computação. Universidade Federal do Rio Grande do Norte. Natal, Rio Grande do Norte, 2010
ELEODORO, Osmar Felipe Alves. Análise do efeito de chaveamento em alta frequência em diferentes tecnologias de semicondutores utilizando um dsp multi-núcleos. Trabalho de conclusão de curso (Graduação em Engenharia Elétrica). Universidade Federal de Uberlândia. Uberlândia, São Paulo, 2022
ENGELOGIC. Introdução aos inversores de frequência. ENGELOGIC Automação E Controle Industrial LDTA, 2020. Disponível em: <https://www.engelogic.com.br/portfolio/introducao-aos-inversores-de-frequencia/>. Acesso em: 26 ago. 2023.
FRANCHI, Claiton Moro. Inversores de Frequência: Teoria e Aplicações. 2ª Edição. São Paulo. Ed. Érica, 2008.
FUNDAÇÃO GETULIO VARGAS. 100 anos da aviação naval no Brasil. Rio de Janeiro, RJ: Ed. FGV Projetos, 2016.
HAN, Lubin, et al. A Review of SiC IGBT: Models, Fabrications, Characteristics, and Applications. IEEE Transactions on Power Electronics, v. 36, n. 2, p. 2080–2093, Mai. 2021.
HAQ, Safa, et al. An Advanced Modulation Technique to Improve the Performance of Modular Multilevel Converter. Proceedings of 2020 IEEE International Conference on ID20264 Applied Superconductivity and Electromagnetic Devices Tianjin, p. 16-18. China, Oct 2020.
HUANG, Alex Q. Power Semiconductor Devices for Smart Grid and Renewable Energy Systems. Proceedings of the IEEE, v. 105, n. 11, p. 2019–2047, Jun. 2017.
HUDSON, Tomas. Understanding LLC Operation (Part I): Power Switches and Resonant Tank. MONOLITHICPOWER. 15/06/2022. Disponível em: <https://www.monolithicpower.com/understanding-llc-operation-part-i-power-switches-and- resonant-tank>. Acesso em: 11/10/2023
INTERNATIONAL MARITIME ORGANIZATION. Improving the energy efficiency of ships. IMO. Disponível em:<https://www.imo.org/en/ourwork/environment/pages/improving%20the%20energy%20effici ency%20of%20ships.aspx>. Acesso em 14 ago. 2023.
INFINEON TECHNOLOGIES AG. IGBTs – Insulated Gate Bipolar Transistors. INFINEON. Disponível em: https://www.infineon.com/cms/en/product/power/igbt/ Acesso em: 09 ago. 2023.
INFINEON TECHNOLOGIES AG. Power MOSFET. INFINEON. Disponível em:<www.infineon.com/cms/en/product/power/mosfet/>. Acesso em: 09 ago. 2023.
KEEPING, Steven. Como projetar com MOSFETs de SiC para melhorar a eficiência do inversor de tração EV. DigiKey’s North American Editors, jul. 2021. Disponível em: <https://www.digikey.com.br/pt/articles/how-to-design-in-sic-mosfets-to-improve-ev- traction-inverter-efficiency>. Acesso em: 17 ago.2023.
LAURENCE, SCOTT & ELECTROMOTORS LTD. Instruction Manual. Manual de Instrução para os geradores CA fornecidos pela Vosper Thornicroft Ltd. às Fragatas Mark 10 da Marinha do Brasil. Norwich, Inglaterra. 1978
MAHDI, Hussein, HOFF, Bjarte, ØSTREM, Trond. A Review of Power Converters for Ships Electrification. Dez 2022. IEEE Transactions on Power Electronics. University of Norway, IEEE Xplore, v. 38, n. 3, p. 4680 – 4697, Abr. 2023.
MARINHA DO BRASIL. UH-12 – Esquilo. MARINHA DO BRASIL. 2023. Disponível em:<https://www.marinha.mil.br/meios-navais/uh-12-esquilo>. Acesso em 21 set. 2023.
. AH-11B – Wild Lynx. MARINHA DO BRASIL. 2023. Disponível em: <https://www.marinha.mil.br/meios-navais/ah-11b-wild-lynx>. Acesso em 21 set. 2023.
. Aeronave AH-11B Wild Lynx – Lançamento MANSUP. FLICKR. 28/04/2023 Disponível em: <https://www.flickr.com/photos/mboficial/52853958819/in/album- 72177720303388021> Acesso em: 21 set. 2023.
. Aeronave esquilo no convoo da Fragata União (F45). FLICKR. 09/02/2023 Disponível em: <https://www.flickr.com/photos/mboficial/52677858897/in/album- 72177720297739735>. Acesso em: 21 set. 2023.
MOHAN, Ned, UNDELAND, Tore M., ROBBINS, William P. Power eletronics: converters, applications, and design. 3ª Edição. Minnesota, USA: Ed. John Wiley & Sons, Inc. 2003.
MOHAN, Ned. Máquinas Elétricas e acionamentos: curso introdutório. Ed. LTC, 2012.
NAVSEA’s Electric Ships Office (PMS 320) e U.S. Navy. Naval and power energy systems – Technology Development Roadmap the U.S.A Navy power and energy leap forward. Estados Unidos da América. Ed. NPES Technology Development Roadmap. 2019. Disponível em: <https://www.navsea.navy.mil/Portals/103/Documents/TeamShips/SEA21/ESO/2019%20NP ES%20TDR%20Distribution%20A%20Approved%20Final.pdf> Acesso em: 17 ago 2023.
OECD (2016), The Ocean Economy in 2030. OECD Publishing, Paris. Abr., 2016. Disponível em: <http://dx.doi.org/10.1787/9789264251724-en>. Acesso em: 16 jul. 2023.
OGATA, Katsuhiko Engenharia de controle moderno. Tradução: Heloísa Coimbra de Souza. 5ª Edição. São Paulo: Ed. Pearson Prentice Hall, 2010.
PATEL, Mahesh A., et al. Use of PWM Techniques for Power Quality Improvement. International Journal of Recent Trends in Engineering, v. 1, n. 4, Mai. 2009.
RASHID, Muhammad H. Eletrônica de potência: dispositivo, circuitos e aplicações. Tradução: Leonardo Abramowicz. 4ª Edição. São Paulo: Ed. Pearson Education do Brasil, 2014.
RASHID, Muhammad H. Power Electronics Handbook: Devices, Circuits, and Applications. 3ª Edição. Burlington, USA: Butterworth-Heinemann, 2011.
ROBERTO, Tiago. Manual técnico: Conversor de frequência 5.0 kVA modelo: CCF 5.0 – 23UVA1C. São Paulo: CTRL TECH conversão de energia, 2022.
SILVA, Matheus Marcoto. Inversor Ressonante em Comutação Suave para Levitação Ultrassônica. Trabalho de conclusão de curso (Graduação em Engenharia Elétrica) – Universidade Estadual Paulista. Faculdade de Engenharia de Ilha Solteira. Ilha Solteira, São Paulo, 2021.
SILVA, Rogério. Conversor CC-CA-CA com link ressonante e comutação ZVS. Dissertação (Mestrado Engenharia de Sistemas Eletrônicos) – Programa de Pós-Graduação em Engenharia de Sistemas Eletrônicos, Universidade Federal de Santa Catarina. Joinville, Santa Catarina, 2020.
SPICHARTZ, M., STAUDT, V., STEIMEL, a. Modular Multilevel Converter for Propulsion System of Electric Ships. IEEE Electric Ship Technologies Symposium (ESTS). Bochum, Alemanha. 2013.
STEINSLAND, Vegard, et al. Design of Modular Multilevel Converters for the Shipnet in Medium Voltage DC All-Electric Ships. 2020 IEEE 21st Workshop on Control and Modeling for Power Electronics. Aalborg, Dinamarca: IEEE Xplore, Nov. 2020.
THANTIRIGE, Kalpani et al. Medium Voltage Multilevel Converters for Ship Electric Propulsion Drives. 2015 International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles (ESARS). Aachen, Alemanha: IEEE Xplore, Mai. 2015.
VOSPER THORNICROFT LTD. Power Supply Book. Sistema de distribuição e carga das Fragatas Mk. 10. DRG nº G10/422/01/001. Norwich, Inglaterra. 1978.
YU, Zhenyu, MOHAMMED, Arefeen, PANAHI, Issa. A review of three PWM techniques. Proceedings of the American Control Conference, p. 257-261. Novo México, USA: IEEE, Jun. 1997.
ZHANG, Lei, et. al. Performance Evaluation of High-Power SiC MOSFET Modules in Comparison to Si IGBT Modules. IEEE Transactions on Power Electronics, v. 34, n. 2, p. 1181–1196, 2019.