REGISTRO DOI: 10.69849/revistaft/dt10202506221022
Robson Cortez Lucena1
Kayron Lima da Silva Rabelo2
RESUMO
A conjunção de receptores de Sistemas Globais de Navegação por Satélite (GNSS) e a técnica de posicionamento cinemático em tempo real (RTK) para máquinas de construção civil permitiu o aumento da agilidade, precisão, acurácia e produtividade das máquinas de movimentação de terra, pavimentação e compactação. Os sistemas de controle de máquinas utilizando GNSS-RTK permitem o controle total da posição das lâminas das máquinas, possibilitando que o operador se preocupe apenas com a direção. Estes sistemas são compostos, além dos receptores GNSS, de rádio UHF, sensores angulares, sensores de rotação, e computador de bordo, que é responsável pela compilação das informações enviadas por cada componente, por eliminar os erros provenientes dos movimentos das máquinas e por determinar a posição da lâmina. Entretanto, notou-se que as empresas brasileiras apresentam resistência à tecnologia. Uma das hipóteses que incentivaram o estudo era que a adoção da tecnologia exigia grandes alterações na forma de trabalho da empresa e nos recursos humanos. Desta forma o presente trabalho buscou demonstrar a diferença entre as técnicas convencionais e a assistida por satélites, seus ganhos e pré-requisitos necessários para seu funcionamento, elucida a problemática enfrentada pelos usuários. .
Palavra-Chave: Sistemas de posicionamento global; Máquinas; Terraplanagem,
ABSTRACT
The combination of receivers of Global Satellite Navigation Systems (GNSS) and the kinematic positioning technique in real time (RTK) to construction machines allowed the increase of agility, precision, accuracy and productivity of earth moving, paving machines and compression. Machine control systems using GNSS-RTK allow full control of the position of the machine blades, allowing the operator to worry only about the direction. These systems are composed, in addition to GNSS receivers, UHF radio, angular sensors, rotation sensors, and on-board computer, which is responsible for compiling the information sent by each component, for eliminating errors arising from machine movements and for determining the position of the blade. However, it was noted that Brazilian companies are resistant to technology. One of the hypotheses that encouraged the study was that the adoption of technology required major changes in the way the company works and in human resources. In this way the present work sought to demonstrate the difference between conventional and satellite-assisted techniques, their gains and pre -requirements necessary for its operation, elucidates the problem faced by users.
Keyword: Global positioning systems; Machinery; Earth moving
1. INTRODUÇÃO
Ao serem analisadas as técnicas construtivas predominantes no cenário nacional, percebe-se que as execuções das obras de terraplenagem convergem com as demais áreas da construção civil quando se analisa a implementação de novas técnicas de execução das atividades do processo construtivo. Um dos motivos para o atraso é o medo dos profissionais que atuam no setor tem de sair de sua zona de conforto. A engenharia é uma das atividades mais antigas do mundo, porém algumas atividades relacionadas à execução das construções, sejam elas populares ou de grande porte, resistem a implementação de novas técnicas em seus processos.
Notadamente civilizações que não detém estabilidade econômica, política e social, sempre o imediatismo se sobressai ao planejamento, e para a mudança de cultura em uma atividade milenar, o comparativo entre resultados é fundamental na escalada tecnológica. O ganho não pode ser apenas em tempo de execução, deve ser também financeiro, em segurança, na qualidade e na sustentabilidade. “Feche algumas portas. Não por orgulho ou arrogância, mas porque já não levam a lugar nenhum” Paulo Coelho (O Zahir, 2005).
A concorrência no setor de engenharia acirra a busca da qualidade do produto com menor custo e tempo de execução das atividades, só assim as empresas conseguem sobreviver ao mercado atual. A pandemia mundial da Covid-19 potencializou a era da tecnologia, tornando irreversível o uso destas ferramentas existentes ou que estejam por vir. Entende-se que empresas de pequeno porte não fazem parte desta parcela capaz de mudar a direção do mercado de equipamentos pesados, uma vez que limitações de equipamentos antigos impossibilitam interfaces entre os modos operantes.
Diante disto, pode-se estudar o uso de tecnologia RTK (real time kinematic ou posicionamento cinemático em tempo real), no controle de equipamentos pesados durante a execução de obras de terraplenagem, com base no uso de dados obtido em campo. Demonstrar a diferença entre as técnicas convencionais e a assistida por satélites, onde seus ganhos e pré requisitos necessários para seu funcionamento elucidam a problemática enfrentada pelos usuários.
Assim, diante deste comparativo, o presente trabalho busca analisar como a utilização da tecnologia GNSS – RTK pode auxiliar na garantia de um serviço seguro e de qualidade durante a execução de obras de terraplenagem, demonstrando através de estudo de caso a importância da implementação de novas tecnologias em obras de infraestrutura.
2. METODOLOGIA
2.1 Tipo de estudo
O estudo fundamenta-se como qualitativo, visto que não tem a necessidade de se aferir valores ou medidas, apenas a busca pelo enriquecimento do estudo prático. A pesquisa é do tipo descritiva, visto que possui o enfoque no estudo de caso, e que os estudos descritivos são os que mais se adéquam aos levantamentos. Exemplos são os estudos de opiniões e atitudes.
Foi utilizada a metodologia de revisão bibliográfica, uma vez que a análise feita sobre o uso do GNSS-RTK para melhorias nas obras de terraplanagem foi retirada de obras e bases eletrônicas de dados que mostram as problemáticas e soluções do tema abordado.
2.2 Local de estudo
O estudo se passa em uma das obras de terraplanagem que tem como responsável uma empresa que presta serviços na área da indústria no Maranhão.
2.3 Execução de Obras de Barragens (bacias para contenção de rejeito de bauxita)
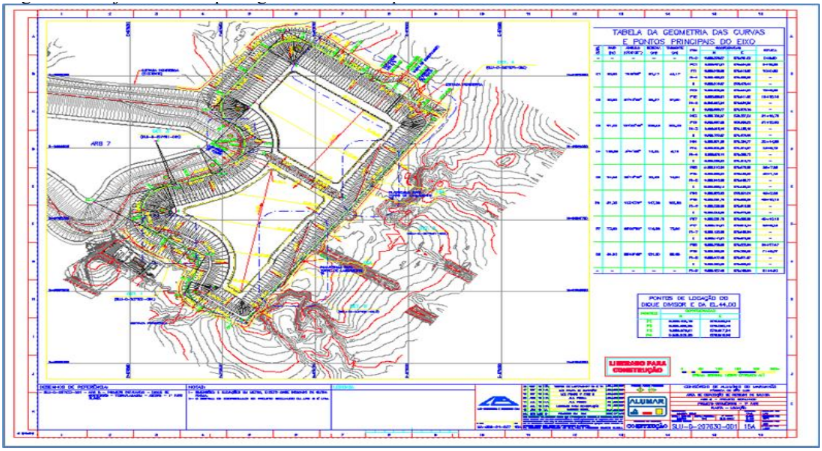
Para este projeto, o volume considerado para aterro dos diques periféricos (norte, sul, leste e oeste) foi de 1.952.466 m³ de material de 1º categoria. Os valores definidos partiram de levantamentos topográficos que definiram a situação inicial do terreno, marcando as seções primitivas, levantadas após desmatamento e remoção de camada vegetal. As cotas finais a serem executadas estão definidas em projeto, ilustrado a seguir, assim como inclinação dos taludes, caimentos no fundo do lago.
Figura 1 – Projeto de Terraplenagem – Aterro Diques
A atividade de terraplenagem constitui de métodos de execução onde a utilização de equipamentos substitui de forma eficiente a mão de obra manual, gerando ganhos imensos de produtividade nas obras. Apesar de apresentarem um elevado custo de aquisição, tornam-se competitivos pela sua alta produtividade. A movimentação de solos pode acontecer através de diversos equipamentos, dentre os quais, podemos citar como exemplo o uso de motoniveladora, escavadeira hidráulica, retroescavadeira, trator de esteira, rolo pé de carneiro, entre outros, ilustrados a seguir.
Figura 2 – Atividade com uso de equipamentos

A sequência de execução constitui praticamente de escavação e transporte de material oriundo de área de empréstimo (escavadeira hidráulica e caminhão basculante), descarregamento de material na praça com espalhamento dele (escavadeira hidráulica, caminhão basculante e trator de esteira), tratamento e compactação do material (caminhão pipa, motoniveladora, trator de pneu, rolo compactador pé de carneiro e rolo compactador liso).
As atividades de compactação de aterro são realizadas em camadas, onde sua liberação depende da aprovação pelos ensaios de compactação, levantados pelo setor da Qualidade. Dentre os ensaios, destaca-se o Método de Hilf, de acordo com a NBR MB-3443/1991 (Solo – Controle de compactação pelo Método de Hilf), onde “O método permite determinar o grau de compactação, no ponto de controle, e o valor do desvio de umidade, sem necessidade do conhecimento prévio do teor de umidade do solo compactado naquele ponto” (NBR12102-MB-3443, 1991, pág. 2).
Figura 3 – Ensaio de solo – Método de Hilf

2.3.1 Impermeabilização
Concluída as etapas de terraplenagem, mediante liberação de áreas, conforme planejamento das atividades iniciam-se os serviços de impermeabilização. As atividades de impermeabilização ficaram por conta da TDM, sendo a contratada responsável apenas pela atividade de Geocomposto drenante e drenagem no fundo do reservatório. Entretanto, devido ao avanço da obra, a empresa ficou responsável pela impermeabilização da primeira camada de geomembrana PEAD.
2.3.1.1 Geomembrana PEAD
Esta especificação inclui a aplicação de membrana sintética de impermeabilização de PEAD com espessura de 1,5mm lisa ou texturizada, no fundo e taludes do reservatório da ARB 8, de acordo com o projeto.
As Geomembrana serão instaladas no fundo e taludes da ARB 8, acima e abaixo do Geocomposto bentônico (GCL) e também no talude do aterro reforçado. Para as emendas entre os painéis, antes do início da execução, é verificado se todas as bordas a serem emendadas estão perfeitamente ajustadas, tensionadas e planas. As juntas que após soldagem apresentarem defeitos tais como, dobras/enrugamentos, vazios/fraca adesão ou permitirem passagem de ar, ocasionarão em retrabalho.
Figura 4 – Lançamento de geomembrana em talude

2.3.1.2 Geocomposto Drenante e Coletores de dreno de fundo
Os painéis de geocomposto drenante são previamente cortados no comprimento necessário para atingir o fundo do envelope de brita que envolve os subcoletores. O geocomposto ficará abaixo do envelope, e na passagem sob este, a face em geotêxtil deverá ser retirada.
Os coletores são divididos em principal e secundário. Os tubos de PEAD perfurados serão instalados sobre o geocomposto drenante, envoltos em envelopes de geotêxtil não tecido preenchidos com brita, costurados duplamente com fios de nylon. A instalação acompanha os alinhamentos de projeto.
Figura 5 – Instalação de geocomposto drenante e coletores

2.3.2 Obras civis
As obras civis constituem atividades de drenagem e captação de rejeitos. Destaca-se também os serviços de preenchimento dos taludes internos com argamassa, item de proteção mecânica do sistema de impermeabilização, sendo aplicado sobre a geocélula, que permitirá que a argamassa aplicada se mantenha estável em seu local de aplicação, preenchendo de maneira geral todo o talude.
Figura 6- Geocélula para contenção da argamassa e lançamento de argamassa

2.3.3 Planejamento e controle
No setor de planejamento, tinha-se controle de todas as atividades da obra, sendo inspecionadas em tempo real as atividades, assim como controle de mão de obra e equipamentos e insumos. As informações obtidas são trabalhadas e refinadas para serem utilizadas pela gerência da empreiteira, fiscalização e cliente. Outro dado importante é a atualização de cronograma, definindo também parâmetros para programações mensais, semanais e diárias, além de replanejamento mediante algum imprevisto, ocorrido no período.
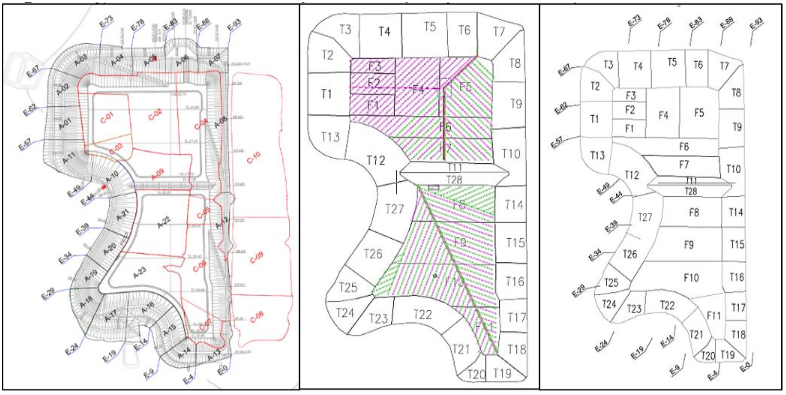
Para melhor controle das atividades realizadas, dividiu-se a obra em áreas. Estas áreas se diferenciavam mediante atividade a ser executada, exemplo: Área de corte e aterro; Áreas de Impermeabilização, Argamassa e Reaterro de fundo; Áreas de Talude Externo para Grama; Área para aplicação de laterita; Disposição de Geocomposto drenante e coletores.
Figura 7 – Área de Corte e Aterro / Impermeabilização e Coletores
2.3.4 Cronograma de avanço Cota&Volume
O cronograma de avanço de Cota&Volume define o avanço do aterro realizado nos diques, sendo detalhado por camadas de cotas, dividindo-se conforme as áreas de planejamento previamente definidas. O avanço era controlado de maneira semanal, mediante levantamento realizado pela topografia.
Figura 8 – Cronograma Cota&Volume

2.3.5 Informes de produção
Os informes de produção são documentos atualizados diariamente, com o intuito de fornecer informações em tempo real, referente às atividades executadas. Detalham-se as seguintes atividades: Escavação e Aterro de material de 1º categoria; Supressão Vegetal; Remoção de camada vegetal e Expurgo; Grama; Concreto; Argamassa; Coletor Principal e Secundário;
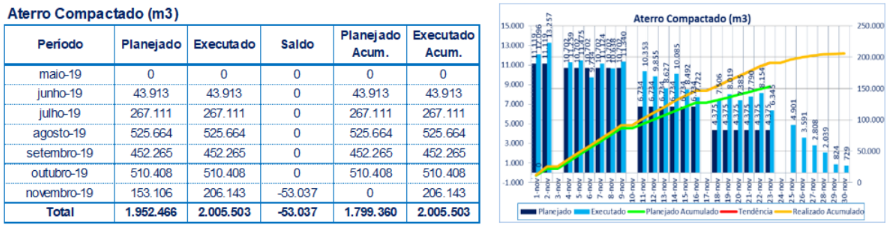
Geomembrana 1ª camada e Geocomposto Drenante; Reaterro de Dreno de Fundo. Na Produção Diária é definido o resumo das atividades, comparando o previsto e o realizado, assim como seus acumulados. A seguir apresenta-se o controle para as atividades de Escavação de 1ª categoria e Aterro Compactado. Pontua-se sobre a planilha com o planejado e executado para cada mês e o gráfico de avanço, contendo itens como Planejado, Executado, Planejado Acumulado, Realizado Acumulado e Tendência.
Figura 9 – Quadro de avanço das atividades de Escavação
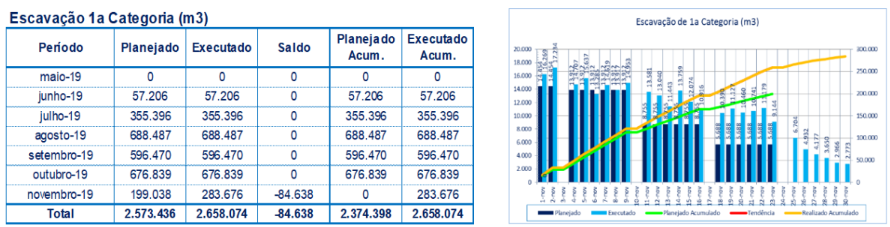
Figura 10 – Quadro de avanço das atividades de aterro
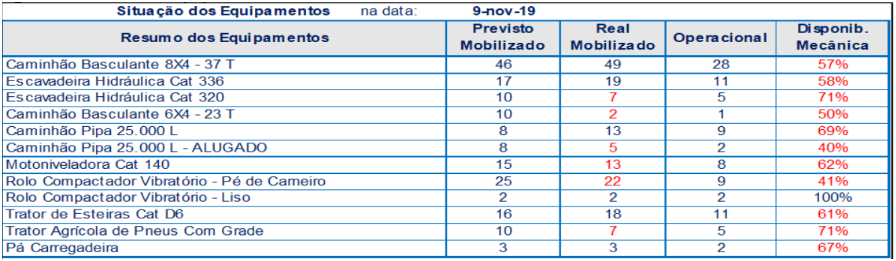
2.3.6 Controle de Equipamentos
O controle de equipamentos é realizado por meio de apontamento diário, levando em consideração status de cada equipamento, definido sua disponibilidade mecânica e operacional, conforme demonstrado a seguir.
Figura 11 – Status de Equipamentos
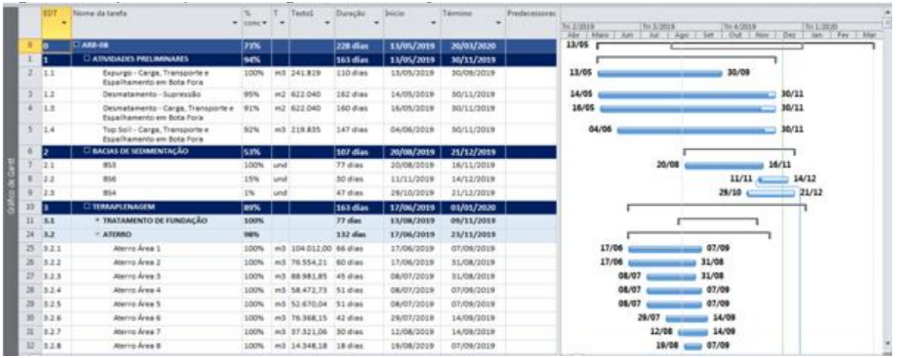
2.3.7 Cronograma de Obra
O cronograma é realizado pelo MS Project, descrevendo as durações de atividades, datas de início e término, assim como a definição das atividades predecessoras e sucessoras, levando-se em consideração as latências existentes em cada atividade. Destaca-se que para um bom planejamento, é necessária uma experiência do planejador, principalmente para obras de grande porte e complexas, como é o caso dessa Área de Rejeitos de Bauxita.
Figura 12 – Representação de Cronograma em MS Project
2.4 Análise dos Dados
Diante dos desafios aqui abordados, foi acompanhado a implementação do sistema de automação de equipamentos em uma obra de infraestrutura de mineração e com isso podemos observar na prática os desafios desta nova metodologia de trabalho. Inicialmente o estudo foi distribuído da seguinte forma: Criar uma metodologia que pudesse atender a demanda de execução da obra; Metodologia levar em consideração o não nivelamento da praça; acompanhar o primitivo a cada camada executada; não impactasse na produção; melhorasse a qualidade; ser prática, sem dificultar a operação. Desta forma, para perfeita sincronia dos resultados, o trabalho ficou dividido em 3 (três) etapas: Levantamento topográfico com RTK, Embarque do levantamento na controladora e execução da atividade com uso da tecnologia.
2.4.1 Levantamento topográfico com RTK
É realizado o levantamento da camada compactada, esses levantamentos serão realizados a cada 03(três) camadas, ou toda vez que a praça ganhar uma extensão maior que 20 metros; ou redução de faixas de trabalho. Um levantamento pode ser utilizado em 3 camadas, permanecendo a estrutura da camada, o tempo para a execução do levantamento é de aproximadamente 07 (sete) minutos, para uma camada de 150 metros de extensão. Após finalizado o levantamento, imediatamente o projeto é exportado como arquivo de máquinas. A nomenclatura do projeto de fácil entendimento para o operador. Ex: FAIXA 1 – A1 – 1106, (faixa – área de trabalho – data do trabalho).
Figura 13 – Execução de levantamento topográfico e dados apurados

2.4.2 Execução da atividade com uso da tecnologia
Uma vez o projeto embarcado o operador irá selecionar o projeto referente a faixa de trabalho, colocará a lâmina sob o solo compactado e irá pegar a referência dessa camada e jogar 25cm de aterro, possibilitando o uso do comando em automático, sempre repetindo este procedimento para cada inserção de dados topográficos.
Figura 14- Embarque na controladora e equipamento no automático

Para determinação dos dados contamos com a ajuda de 3 colaboradores um apontador, 01 (um) topógrafo e 01 (um) auxiliar de topografia. Separando as responsabilidades da seguinte forma: Apontador – para essa função era necessário cronometrar o tempo de operação do trator.
Desconsiderando tempos de paradas; tais como espera de material, caminhões atolados, passagem de pessoas/máquinas; Topografia – levantar todas as camadas de material (Lançado, tratado e compactado).
Após finalizada cada atividade (lançamento do material, tratamento do material e a compactação da camada) era realizado o levantamento topográfico a fim de determinar a volumetria de cada camada. Associando também o valor volume ao tempo, para determinar a produção em m³/H. Também, a fim determinar valores intrínsecos ao processo, foi contabilizado em algumas camadas a quantidade de manobras necessárias para realização da atividade. Este dado tinha o intuito de determinar o valor de manobras por cada 100 m³, para isso cada vez que o equipamento acionava a ré era contabilizado.
3. RESULTADOS
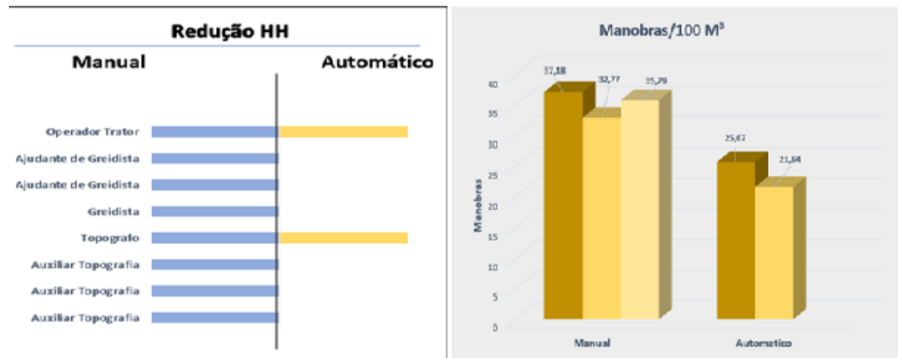
3.1 Relação homem x hora e Manobras do equipamento
Neste tópico é possível analisar a relação homem x hora de acordo com a máquina em trabalho manual e trabalho automático. Além disso, na mesma figura é possível verificar a operação do equipamento para cada 100 m³ também fazendo uma relação entre o manual e o automático.
Figura 15 – Relação homem x hora e operação equipamento
3.1.1 Detalhamento das informações
Figura 16 – Apontamento de campo
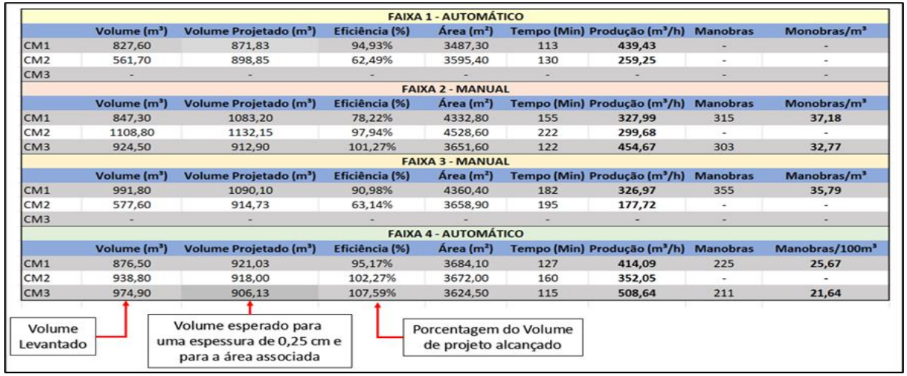
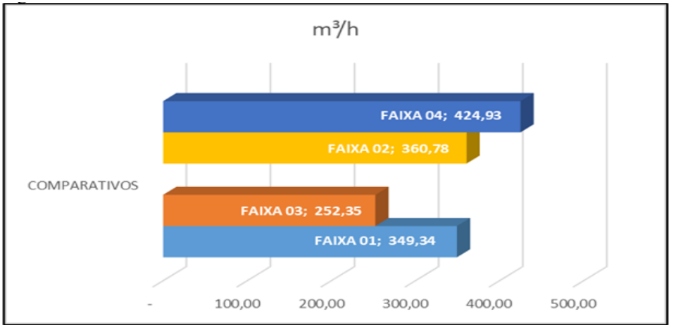
3.2 Análise da produtividade e eficácia
Nessa análise da Figura 17, verifica-se que a produção em média com o sistema automatizado ficou sempre superior ao método manual, com produção média de 387,13m³/h, contra 306,56m³/h do método tradicional. Portanto essa implementação mostrou ser 26% mais produtivo que o método manual.
Figura 17 – Produtividade
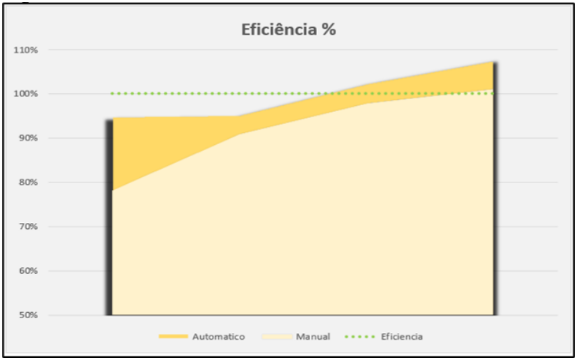
Analisando a figura 18, a quantidade de manobras realizadas por cada metodologia, se percebe uma redução percentual de 33% das manobras. Com isso tem-se: redução do consumo de combustível, redução no desgaste de peças dos materiais rodantes e aumento direto no fator segurança aos colaboradores envolvidos na atividade.
Figura 18 – Eficácia
4. CONCLUSÃO
Foi observado que as obras de infraestrutura, assim como as obras civis, a precisão e qualidade das informações advindas do campo, são fundamentais para tomada de decisões gerenciais. Também, foi observado que mesmo quando a movimentação de solo em um projeto tem o maior percentual físico/financeiro, as demais atividades impactam diretamente no resultado almejado.
Especificamente ao serem analisados a implementação da automatização nos equipamentos de grande porte, percebe-se um ganho real de produtividade em cerca de 26% em detrimento ao método tradicional, porém outro dado vital e que precisa ser estudado é a diminuição do consumo de combustível, material rodante, insumos topográficos e mão de obra de apoio. Sabe-se que o custo de instalação desta tecnologia é expressivo e precisa ser implementado gradativamente na construção pesada. Foi visto também que para seu perfeito funcionamento, existe a necessidade real de: treinamento de mão de obra, adaptações nos equipamentos e o principal que é aceitação do investidor, só assim novas tecnologias poderão ser introduzidas em uma das atividades mais antigas da engenharia civil.
Durante o processo do estudo no projeto, apurando das informações necessária, foi observado que as 05 (cinco) fases de um projeto, segundo o guia PMBOK – (iniciação, planejamento, execução, monitoramento/controle e encerramento), estão sendo rigorosamente seguidos, sendo facilitadores na análise das informações aqui apresentadas. Outro fato bastante relevante foi obter os dados com simples apontamentos realizados em campo, que em nada mudou a rotina habitual dos envolvidos, e trouxe uma riqueza de detalhes fundamentais para uma tomada de decisão e posterior ganho de tempo e prazo.
Portanto, bem é verdade que a tecnologia ainda tem valor econômico elevado, e com o mercado cada vez mais sedento por diminuição de custo, inicialmente o impacto financeiro precisa ser esmiuçado pela equipe técnica a fim de ponderar a que passos cada empresa poderá fazer uso deste recurso, fundamental para que o setor seja cada vez mais competitivo, com qualidade, segurança e sustentabilidade.
REFERÊNCIAS
BORGES, A. Topografia aplicada à engenharia civil. São Paulo – SP: Editora Blucher, 1992.
CATERPILLAR. Novos equipamentos. 2016. Disponível em: <http://www.cat.com/pt_BR/products/new/equipment.html>. Acesso em:06 ago 2020
CHAKRABORTY, A. PRAMANIK, A.; BARADOL, R. A. Study of RTK performance of GNSS receivers under various satellite tracking and frequency of operations. 2013 Annual International Conference on Emerging Research Areas and 2013 International Conference on Microelectronics, Communications and Renewable Energy, Kanjirapally, p. 1-5, 2013.
ELTRAK. Products Accugrade. 2016. Disponível em: <http://www.eltrakbulgaria.com/en/page/644>. Acesso em: 28 set. 2020.
JACKSON, Tom. TEST DRIVE: Caterpillar’s low-tech, K2 dozer automation allows GPS like machine control without the price tag (PHOTOS). 2016 Disponível em: <http://www.equipmentworld.com/test-drive-caterpillars-low-tech-k2-dozer-automation-allows gps-like-machine-control-without-the-price-tag-photos/>. Acesso em: 28 set. 2020.
LOPES,Juliano Marçal. Uso de tecnologia GNSS-RTK no controle automatizado de máquinas de construção civil e infraestrutura viária. Trabalho de conclusão de curso. Campinas,2017.
MIKULSKI, Jerzy (Ed.). Challenge of Transport Telematics: 16th International Conference on Transport Systems Telematics, TST 2016, Katowice-Ustrón, Poland, March 16–19, 2016, Selected Papers. Springer, 2016.
MONICO, João Francisco Galera. Posicionamento pelo GNSS: descrição, fundamentos e aplicações. Editora UNESP, 2008.
PRATA, B.; NOBRE, F.; BARROSO, G. Modelagem de sistemas de terraplenagem: uma aplicação das redes de petri. Anais da CILAMCE 2005, Guarapari – ES, 2005.
ROBERTS, G. W.; DODSON, A. H.; ASHKENAZI, V. Global Positioning System aided autonomous construction plant control and guidance. Automation in Construction, 8, 589– 595, 1999.
TRIMBLE. GCS900 Grade Control System for Excavators. Operator’s Manual, Version 12.60, Revision B, Part Number 65129-07-ENG. Feb. 2014.
1Engenheiro Civil, egresso da faculdade ISL WYDEN
2Engenheiro Civil e Docente na Faculdade Estácio São Luís