APPLICATION AND SIMULATION ENVIROMENT IN A DIDACTIC PLANT WITH A PID CONTROLLER USING ANTI WIN-UP
REGISTRO DOI: 10.69849/revistaft/fa10202505161743
Marcelo Furtado de Mendonça;1 Rogério Passos Amaral;2 Gustavo Maia de Almeida;3 José Leandro Félix Salles;4 Celso José Munaro;5 Marco Antonio de Souza Leite Cuadros.6
RESUMO
O ensino do controle clássico geralmente é feito através de controladores pré-programados, onde o usuário apenas insere os parâmetros de sintonia. Embora esta prática seja usual no ambiente industrial, num ambiente acadêmico é necessário que os alunos possam desenvolver seus próprios algoritmos de controle de uma forma rápida e eficiente, trazendo segurança do conhecimento adquirido. Neste artigo são apresentados exemplos de simulação e aplicação prática do controlador PID que podem servir como guia para o ensino das disciplinas de controle. Uma placa de aquisição de dados foi utilizada para acessar as variáveis de uma planta didática. Um software de programação gráfico (LabVIEW) foi utilizado para implementação do controlador PID, usando para isto a equação a diferenças, reduzindo assim a distância entre o aprendizado teórico e prático.
Palavras-chave: Planta Didática, Controladores PID, LabVIEW, Anti Win-up
ABSTRACT
The teaching of classical control is usually done through pre-programmed controllers, where the user only inserts the tuning parameters. Although this practice is usual in the industrial environment, in an academic environment, it is necessary that students can develop their own control algorithms quickly and efficiently, bringing security of the knowledge acquired. This article presents examples of simulation and practical application of the PID controller that can serve as a guide for teaching the subjects of control. A data acquisition board was used to access the variables of a didactic plant. A graphical programming software (LabVIEW) was used to implement the PID controller, using for this the difference equation obtained by discretization, thus reducing the distance between theoretical learning and practical.
Key-words: didactic plant, PID controllers, LabVIEW, Anti Winup
1 INTRODUÇÃO
É reconhecido que os estudantes aprendem muito melhor praticando, sendo que normalmente o melhor aprendizado está relacionado com a integração da teoria com a prática. No caso de engenharia, seus egressos assumirão tarefas, cargos e responsabilidades complexas e com grande impacto social nos seus resultados, fortemente vinculados ao desenvolvimento nacional, que exige uma qualificação profissional e institucionalizada (Mota R. & Martins R., 2008).
A procura das companhias é por engenheiros que pensam criticamente, com a capacidade de reconhecer todos os aspetos do projeto e que conseguem integrar o conhecimento de várias fontes (Gindy, 2006). Dentro deste contexto o objetivo geral da educação em engenharia é preparar os estudantes para a prática dentro de uma indústria (Feisel, 2005).
Com o intuito de preparar os estudantes no ambiente de programação, primeiramente são apresentadas experiências de simulação de processos de primeira ordem em malha aberta e fechada usando controladores digitais PI; posteriormente é apresentada uma experiência de laboratório para o controle de nível de um tanque. Adequações dos sinais nas plantas didáticas para a aquisição de dados e controle foram necessários. As placas de aquisição de dados são conectadas via USB e o controle é feito por um programa que é executado no próprio computador que também faz a supervisão. Sendo assim, a programação dos algoritmos dos controladores PID precisará de maior conhecimento e competência dos alunos que seu simples uso.
2 CONCEITOS
Nesta seção serão apresentados resumidamente alguns conceitos para dar suporte aos exemplos que serão mostrados. O software LabVIEW foi escolhido como ambiente de desenvolvimento, isto devido à simplicidade e flexibilidade na programação e a praticidade na aquisição de dados.
2.1 Princípios Básicos do LabVIEW
Os programas no LabVIEW são chamados de instrumentos virtuais ou VIs (virtual instruments), porque sua aparência imita fisicamente aos instrumentos físicos, tais como osciloscópios ou multímetros (NI, 2005). Sua programação é gráfica e os programas são feitos usando ícones que representam funções que são unidas com linhas para relacioná-las e estabelecer as sequências.
A interface de programação está basicamente dividida em duas partes: o painel frontal (front painel) e o diagrama de blocos (block diagram), como podem ser observados na Figura 1. No diagrama de blocos se encontra a lógica do programa ou a programação gráfica anteriormente mencionada; já no painel frontal estão todos os elementos necessários para estabelecer a interface com o usuário, uma vez que o programa esteja finalizado. As variáveis criadas no diagrama de blocos serão criadas automaticamente no painel frontal ou vice-versa, como pode ser observado na Figura 1.
Além de mostrar a estrutura dos VIs a Figura 1 mostra um exemplo de programação gráfica, onde observa-se dois reguladores e um indicador gráfico. No LabVIEW a fonte dos dados é normalmente chamado de controlador, no caso do exemplo os reguladores seriam controladores, e as variáveis que recebem dados são chamados de indicadores, no exemplo o indicador é a variável “Nível de Regulação”. O fluxo de dados no LabVIEW é defino da seguinte forma: uma função ou ícone é executada quando todas suas entradas estão disponíveis, logo após, este fornecerá dados a seus terminais de saída.

2.2 Definições Básicas usadas no controle de processos
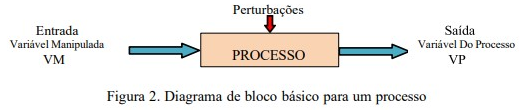
Um processo é representado por um bloco com uma entrada e uma saída como mostra a Figura 2. A variável do processo (VP) é mudada através da mudança da variável manipulada (VM); entretanto também é afetada por ações inerentes ao processo ou por outras ações externas chamadas de perturbações.
A resposta da VP devido a variações da VM num processo de primeira ordem é mostrada na Figura 3
Figura 3 e é definida pela função de transferência dada pela Equação 1.

onde Kp é o ganho estático e τ a constante de tempo. A constante de tempo (τ) é o tempo para que a VP alcance o 63.2% do valor final depois da variação provocada na VM. O ganho estático (Kp) é a relação entre as variações da VP e VM respectivamente.

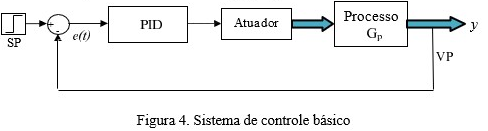
A maioria dos sistemas básicos de controle é representada pela malha de controle mostrada na Figura 4, onde o controlador PID é definido pela Equação (2),

onde e é o erro (SP-VP), Kc é o ganho do controlador, Ti é o tempo integral e Td é o tempo derivativo. Sendo os parâmetros de sintonia Kc, Ti e Td.
Nos últimos anos o uso de controladores digitais vem se tornando mais abrangente nos sistemas de controle. Por tanto neste artigo são usados modelos e controladores digital para a implementação dos exemplos simulados e práticos. O modelo de primeira ordem (Equação 1) pode ser discretizado para obter o modelo correspondente no tempo discreto Gp(z) (Equação 3), onde T é o período de amostragem.

A Equação (3) pode ser representada em equações diferença como

onde y é a variável do processo e u é o sinal de controle.
Utilizando as aproximações seguintes:


3 EXEMPLOS DE SIMULAÇÃO
Nesta seção será apresentado a implementação de um simulador usando um controlador PID com anti win-up, sendo a planta substituída por um modelo de primeira ordem desenvolvido no LabVIEW. Dessa forma, será obtido um simulador de malha fechada com a capacidade de sintonizar os ganhos de um controlador PID e de alterar a dinâmica da planta trocando-se o ganho (Kp) e a constante de tempo (τ).
3.1 Resposta em malha aberta
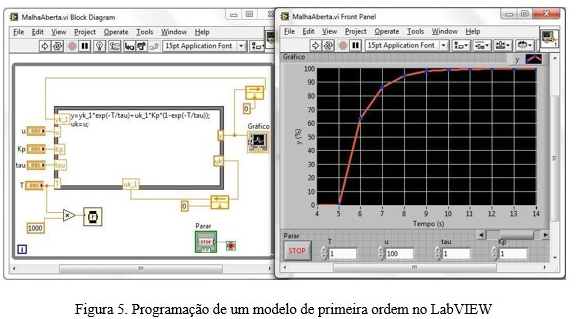
A Equação (4) foi programada no Labview como se mostra na Figura 5 e usou-se principalmente o recurso do LabVIEW denominado Formule Node, com τ=1segundo e Kp=1.
Para o exemplo mostrado se aplicou um degrau na entrada de 0 a 100% no instante t=5seg.
3.2 Resposta em malha fechada
Quando um controlador com ação integral é usado e os atuadores chegam a seus limites, a parte integral continuará se acumulando sem provocar nenhuma mudança no atuador, e quando o erro mudar de sentido a parte integral provocará um atraso na ação do controle. Devido a esta característica conhecido como Wind-up o sistema tende a ficar lento e oscilatório. Para evitar este problema existem várias técnicas. Neste trabalho é usado o Back- Calculation and Tracking mostrado na Figura 6, neste método é modificado o termo integral para evitar que este ultrapasse os limites de saturação do atuador.
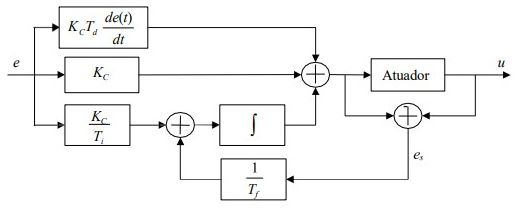
Figura 6. PID com anti Wind-up
O PID discreto (Equação 6) é modificada para obter uma expressão de um PID discreto com anti Wind-up (Equação 7). A programação deste controlador no LabVIEW é mostrada na Figura 7.

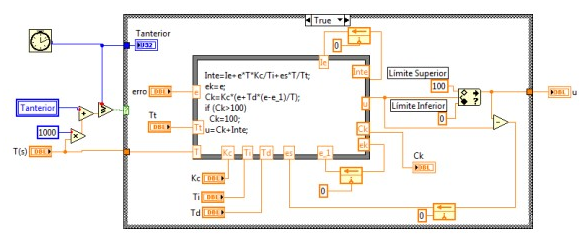
Figura 7. Controlador PID com anti win-up programado no LabVIEW
Associando o modelo e o controlador descrito anteriormente, foi implementado um simulador de um processo de primeira ordem em malha fechada usando o PID. O painel de controle, o diagrama de blocos e os resultados são mostrados na Figura 8. Os tempos de amostragem do modelo e do controlador são independentes, também é possível mudar o período de amostragem do gráfico.
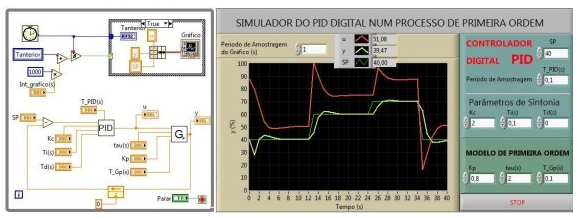
Figura 8. Simulador de uma malha fechada
4 APLICAÇÃO PRÁTICA
4.1 A planta
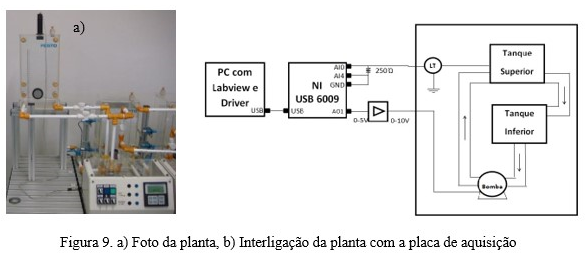
A planta de nível do laboratório de controle do IFES/Serra é mostrada na Figura 9 (a), que é composta basicamente por um tanque superior, outro inferior e uma bomba que é usada para levar água do tanque inferior para o superior. A interligação do computador com a placa NI 6009 é feita através da conexão USB. A placa de aquisição de dados usa uma entrada analógica para medição do nível e uma saída também analógica para o controle da bomba, um amplificador foi usada para a adequação dos sinais (Figura 9 (b)).
4.2 A placa de aquisição
O NI USB-6009, Figura 10, é uma placa USB de aquisição de dados com entradas e saídas analógicas e digitais.

As principais características são as seguintes:
- 8 entradas analógicas simples ou 4 entradas diferencias. É possível configurar por software as faixas de tensão: ± 20V, ± 10V, ± 5V, ± 4V, ± 2.5V, ± 2V, ± 1,25, ± 1V. Taxa máxima de amostragem 48000 KS/s, com 14 bits de resolução do conversor AD
- 2 saídas Analógicas. Escala da tensão é 0 – 5V (fixo), taxa de atualização da saída é 150Hz com 12 bits de resolução do conversor AD.
- 12 canais digitais, que podem ser usados tanto como DI ou DO (configurados individualmente).
As entradas e saídas da placa de aquisição USB-6009 podem ser testadas sem a necessidade do desenvolvimento de um programa, bastando usar o Measurement & Automation Explorer da National Instruments.
4.3 Resultados práticos
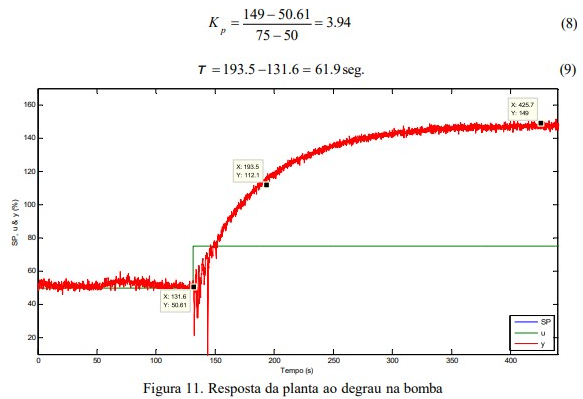
Para fazer a sintonia o primeiro passo é obter o modelo da planta que se deseja controlar. Para isto foi aplicado um degrau de 50 para 75 na bomba e a resposta da VP (o nível) foi registrada como se mostra na Figura 11. O ganho do processo (Equação 8) e a constante de tempo (Equação 9) foram calculados usando os pontos mostrados na Figura 11.
Usando o método de sintonia IMC, foram obtidos os valores de Kc, Ti e Td, que foram ajustados através de testes para obter um resultado ainda melhor. A sintonia usada foi: Kc =8, Ti =20 seg. e Td = 0. Na Figura 12 se mostra a resposta da planta em malha fechada com um PID simples e a Figura 13 com um PID com o anti Win-up.
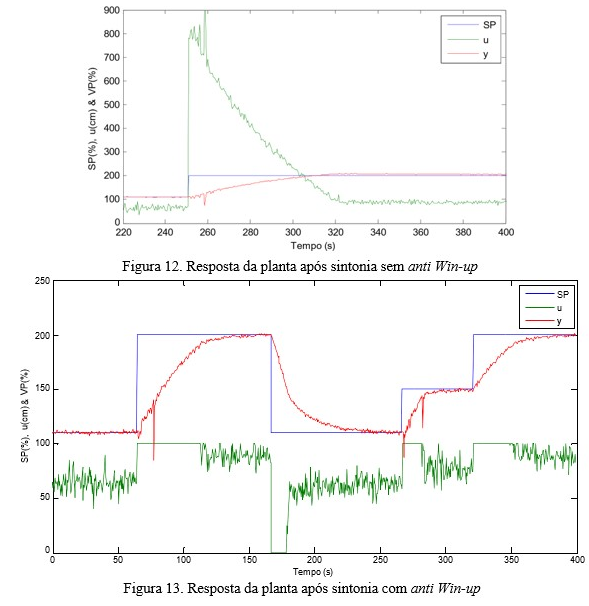
Quando não se aplica o anti Win-up o sinal de controle extrapola os limites como se observa na Figura 12, no entanto a aplicação deste método melhora a reposta como pode ser observado na Figura 13. Este efeito é mais visível em processos rápidos por ser a participação da componente integral maior.
5 CONCLUSÕES FINAIS
Este trabalho descreve a sequência de desenvolvimento de um controlador PID discreto usando a simulação e uma implementação prática em uma planta didática. O procedimento mostrado pode servir como guia aos alunos para implementações semelhantes. O Simulador será de muita importância para o ensino das disciplinas de controle, pois permite que o aluno consolide seus conhecimentos no ambiente de simulação. O ambiente de controle da planta didática será utilizado para fortalecer o conhecimento teórico com a prática.
REFERÊNCIAS BIBLIOGRÁFICAS
FEISEL, L. D. & ROSA A. J.. “The Role of the Laboratory in Undergraduate Engineering Education”, Journal of Engineering Education, January, p. 121-130, 2005
Getting Started with LabVIEW, National Instruments (NI), Agosto 2005.
Gindy, Mayrai. “A New Approach to Undergraduate Structural Engineering Laboratory Instruction”, Proceedings of the ASEE New England Section, Annual Conference, 2006.
Mota R. & Martins R. “AS POLÍTICAS DO MEC PARA A EDUCAÇÃO SUPERIOR E O ENSINO DE ENGENHARIA NO BRASIL”, Revista de Ensino de Engenharia, v. 27, n. 3, p.61-68, ISSN 0101-5001, Edição especial 2008.
1mfurtadodemendonca@gmail.com
Aracruz Energia – Rua Papuana, 105B – Coqueiral
29.199-084 – Aracruz – ES
2Arogeriop@ifes.edu.br
3gmaia@ifes.edu.br
Instituto Federal do Espírito Santo – Campus Serra, Coordenadoria de Automação Industrial Rodovia ES-01 – Km 6,5 – Manguinhos
29164-231 – Serra – ES
4jleandro@ele.ufes.br
5munaro@ele.ufes.br
Universidade Federal do Espírito Santo – Departamento de Engenharia Elétrica Av. Fernando Ferrari, 514
29075-910 – Vitória – ES
Marco Antonio de Souza Leite
6marcoantonio@ifes.edu.br
Instituto Federal do Espírito Santo – Campus Serra, Coordenadoria de Automação Industrial Rodovia ES-01 – Km 6,5 – Manguinhos
29164-231 – Serra – ES