CONTROL OF LEVEL BY IMAGE ACQUISITION IN A DIDACTIC PLANT
REGISTRO DOI: 10.69849/revistaft/fa10202505152351
Marcelo Furtado de Mendonça1, Daniel Romero Guerra da Silva2, João Mário de Carvalho e Carvalho3, Felipe da Silva Paiva4, Raphael Belizario5, Ravena Soares Monteiro6, Rogério Passos Amaral7, Marco Antonio de Souza Leite Cuadros8, Gustavo Maia de Almeida9, Guilherme Vicente Curcio10
RESUMO:
Este artigo tem a finalidade de demonstrar o controle, por aquisição de imagens, do nível da planta didática do laboratório 303 do IFES/Serra, para ser utilizada como experiência de laboratório no início do curso de Engenharia de Controle e Automação, motivando os alunos e diminuindo a evasão nesta fase do curso. O método usado neste artigo pode ser usado para diversas outras atividades relacionadas a aquisição de imagens. A programação para o controle por imagem foi executada no LabVIEW, que oferece dispositivos de aquisição e tratamento da imagem.
Palavras-chave: Controle de nível por imagem, Controle por aquisição de imagem, Labview®.
ABSTRACT:
This paper has the purpose of demonstrating the control, by image acquisition, of the level of the didactic plant of the laboratory 303 of IFES / Serra, to be used as laboratory experience at the beginning of the Control Engineering and Automation course, motivating students and decreasing evasion at this stage of the course. The method used in this article can be used for several other activities related to image acquisition. The programming for image control was performed in LabVIEW, which provides image acquisition and treatment devices.
Key-words: Image level control, Image acquisition control, Labview®.
1. INTRODUÇÃO
Da década de 1960 até os dias de hoje, a área de processamento de imagens cresceu rapidamente. Procedimentos computacionais são utilizados para realçar o contraste ou para facilitar a interpretação de imagens radiográficas e outras imagens utilizadas na indústria, na medicina e nas ciências biológicas. As áreas de aplicação do processamento digital de imagens são tão variadas que requerem alguma forma de organização para que todo seu escopo seja incluído. Uma das formas mais fáceis de desenvolver uma compreensão básica da extensão das aplicações do processamento de imagens é categorizar as imagens de acordo com sua fonte (por exemplo, visual, raios-X e assim por diante) (Gonzales; Woods, 2010).
O controle por aquisição de imagem é utilizado também com robôs móveis de navegação autônoma, movidos por sistema de localização a partir do reconhecimento de marcos visuais (landmarks), como em (Pimentel et al., 2014).
As extrações das informações de reconhecimento do robô, para sua locomoção, são obtidas por processamento de imagens adquiridas por webcam, que determinam a orientação e a posição global do robô móvel. O software LabVIEW, da National Instruments® possui uma excelente ferramenta de robótica e visão computacional (Batista et al., 2016).
O uso da câmera como sensor tem se mostrado útil na tarefa de controle e indicação, sendo capaz de monitorar, com alto nível de sensibilidade e precisão, pequenas variações que visualmente seria de difícil percepção.
Neste artigo, o uso do processamento de imagens será para monitoramento e controle do nível de uma planta, através de uma webcam e do programa LabVIEW.
2. CONCEITOS
2.1. A planta no controle de nível por imagem
Na “Figura 1-a” é mostrada a planta didática do laboratório de controle do IFES/Serra e na “Figura 1-b” a interligação da planta com a placa NI 6009 e também a ligação da câmera de aquisição de imagens em tempo real com o computador e programa LabVIEW. A planta possui dois tanques, um superior e um inferior. O tanque inferior é usado para encher e esvaziar o tanque superior. Já o segundo tanque, o superior, é usado para o controle e possui uma bomba de 10 v.
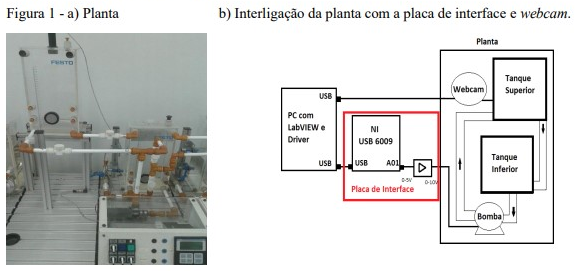
Para atender a bomba, que trabalha com sinal de 0 a 10V, foi usado um amplificador de ganho 2 tendo em vista que a saída da placa é de 0 a 5V, conforme a “Figura 1b” mostra.
2.2. A Placa de Interface
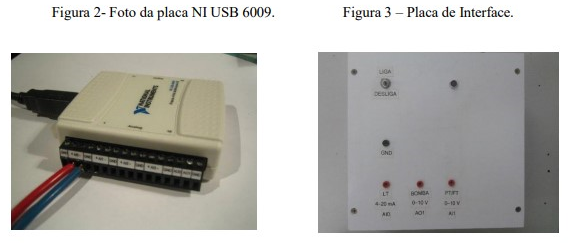
Foi usada a placa de interface NI USB-6009 da National Instruments, “Figura 2”, para comunicação da planta com um computador. Essa comunicação tem como objetivo realizar o controle da planta através do computador com software LabVIEW implantado (Pereira et al., 2011). A Placa de Interface tem capacidade para receber dados do sensor ultrassônico localizado no tanque superior da planta, porém nesta aplicação, esse sensor foi substituído pela webcam, que capta os dados do nível e leva diretamente ao computador, sem passar pela placa de interface.
A placa NI USB-6009 possui 8 entradas analógicas simples com conversor analógico-digital de 14 bits de resolução; 2 saídas analógicas com a escala 0-5v com conversor analógico-digital de 12 bits de resolução; e 12 canais digitais que podem ser configurados como entrada digital ou saída digital. A interface, “Figura 3”, é composta pela placa USB-6009 e circuitos eletrônicos adicionais para amplificação de sinal, destacado na “Figura 1b”.
2.3. Comunicação do computador com a placa de interface.
Ao conectar a placa de interface com o computador pelo cabo USB, faz-se necessário adicionar um dispositivo de comunicação na programação. A “Figura 4” mostra o bloco de comunicação que é responsável pela comunicação do programa com a placa de interface e que deve ser adicionado ao diagrama de blocos (NI, 2006).
Figura 4 – Blocos de comunicação.

2.4. O LabVIEW.
O LabVIEW é um programa que fornece um ambiente de desenvolvimento de aplicações de fácil uso, projetado especificamente para atender às necessidades dos engenheiros e pesquisadores. Através de suas poderosas funcionalidades, o LabVIEW pode ser facilmente integrado a uma grande variedade de plataformas de hardware ou software (NI, 2009).
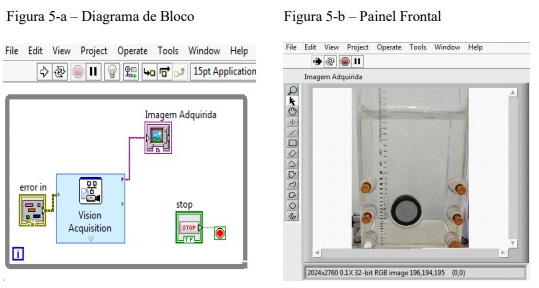
Para entender o funcionamento do LabVIEW é necessário conhecer as duas interfaces do programa, que são: O Diagrama de Blocos e o Painel Frontal, “Figura 5-a” e “Figura 5-b”.
No Diagrama de Blocos se encontra a lógica do programa executado. Nele estão as funções selecionadas no Painel Frontal.
No Painel Frontal são selecionadas as funções a serem relacionadas no Diagrama de Blocos e também onde se estabelece a interface de usuário para visualização das funções e seus indicadores.
2.5. O Conceito de Imagem e sua aquisição.
Para se obter uma imagem digital é necessário passar por etapas de aquisição e digitalização de uma imagem real. A imagem a ser adquirida é primeiramente convertida em sinal elétrico analógico através de sensores ópticos. Posteriormente esse sinal analógico é convertido em sinal digital através de circuitos eletrônicos específicos chamados frame grabbers (dispositivos de captura de quadro), tornando possível a interpretação por computadores. Uma vez digitalizada a imagem, essa pode ser adequadamente processada, muitas vezes fazendo uso de arquiteturas especiais para agilizar o processo. Por fim utilizam-se dispositivos de saída, como por exemplo os monitores, para a visualização dos resultados.
A aquisição de dados de uma imagem real começa pela captação óptica de uma imagem real, esse processo se chama transdução optoeletrônica. O primeiro passo na conversão de uma cena real tridimensional em uma imagem eletrônica é a redução de dimensionalidade. Uma câmera fotográfica ou câmera de vídeo converterá a cena 3-D em uma representação 2-D adequada.
2.6. Estrutura de um sistema de visão artificial
Após a captura da imagem real e sua digitalização, esta imagem deve ser tratada para extrair ou acrescentar características necessárias para o processamento e formação de resultados (Filho; Neto, 1999).
O processamento de imagens é uma técnica extremamente dependente do problema que queremos resolver. Muitos dos procedimentos usados em processamento de imagens ou visão por computador podem ser caracterizados de rudimentares ou mesmo artesanais quando comparados ao complexo sistema visual humano, pois serão específicos para cada aplicação (Albuquerque, 2000).
Para obter esse resultado a imagem deve passar pelas seguintes etapas:
Aquisição, pré-processamento, segmentação, extração de característica, interpretação e resultado, conforme mostra a “Figura 6”.
Figura 6- Estrutura do sistema.
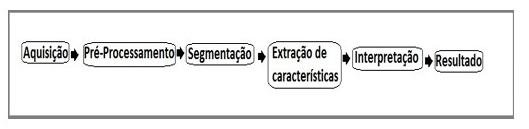
Pré-Processamento: a imagem resultante da aquisição pode apresentar diversas imperfeições, tais como: presença de pixels ruidosos, contraste e/ou brilho inadequado. A função da etapa de pré-processamento é aprimorar a qualidade da imagem para as etapas subsequentes. As operações efetuadas nesta etapa são ditas de baixo nível porque trabalham diretamente com os valores de intensidade dos pixels.
Segmentação: a tarefa básica da etapa de segmentação é a de dividir uma imagem em suas unidades significativas, ou seja, nos objetos de interesse que a compõem.
Extração de características: esta etapa procura extrair características das imagens resultantes da segmentação através de descritores que permitam caracterizar com precisão o elemento de avaliação, no caso o nível, e que apresentem bom poder de discriminação entre os diversos elementos que compõem a cena, no caso líquido e recipiente. Estes descritores devem ser representados por uma estrutura de dados adequada ao algoritmo de reconhecimento. Interpretação: nesta última etapa do sistema, denominamos reconhecimento o processo de atribuição de um rótulo a um objeto baseado em suas características, traduzidas por seus descritores. Neste exemplo de indicação de nível, uma forma simples de interpretação seria a verificação dos algoritmos da extração e interpretá-los como valor quantitativo de nível.
Resultado: o resultado esperado é a interpretação por parte do controle acerca do valor real do nível, para poder interferir no mesmo e modificá-lo a fim de chegar ao setpoint.
3. ETAPAS DA VISÃO ARTIFICIAL
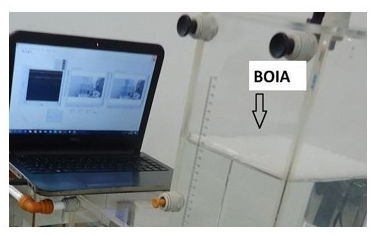
Para que a visualização artificial ocorresse, foi utilizada uma boia, “Figura 7” sobre o líquido do recipiente do tanque, para criar contraste com o fundo. A webcam detecta a boia e monitora seu deslocamento.
Figura 7 – A boia.
3.1 Dispositivos de imagem
Com a captação da imagem do nível da planta pela webcam, a mesma é enviada até o computador com o programa Labview® por cabo USB, pelo dispositivo Vision Acquisition. A imagem do Vision Acquisition é apresentada também no Painel Frontal e segue para a próxima etapa, que é o Vision Assistant, onde ocorre as etapas de filtro de dados de interesse da imagem original, mostrada nas “Figura 8-a” e “Figura 8-b”.
3.2 Dados de interesse da imagem
No Vision Assistant podem ser encontradas ferramentas para tratamento da imagem, com a finalidade de adquirir dados que serão de interesse do programa para que haja uma interpretação adequada do que acontece na imagem. No controle do nível, esse dado é o valor de deslocamento da boia utilizada para interpretar o nível em milímetros.
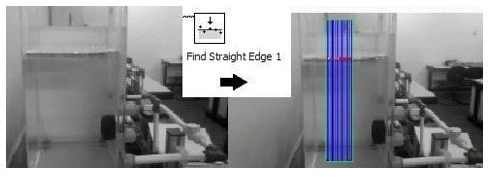
O filtro utilizado foi o Find Straight Edger, “Figura 9”, que é capaz de encontrar a posição da boia e informar seu valor na coordenada Y.
Na figura a seguir, pode ser notado o uso do filtro. Na imagem localizada à esquerda da figura há o tanque antes de receber a filtragem. Na direita, pode ser visualizado o filtro em azul sobre a imagem do tanque, onde há uma linha vermelha sobre a boia, que indica o posicionamento do nível na imagem. Essa linha significa que a imagem original foi bem interpretada e irá gerar um valor de variável proporcional ao deslocamento do nível, chamada de eixo Y na programação.
Figura 9 – Filtro Find Straight Edge
4 APLICAÇÃO PRÁTICA
4.1 Diagrama de blocos do programa
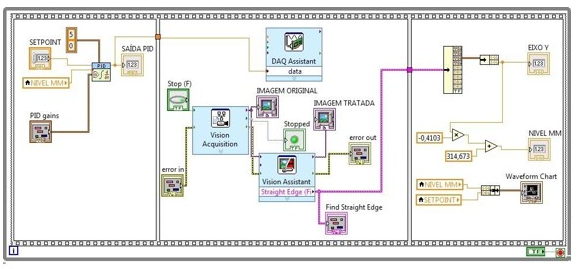
Para se obter os dados do controle por imagem foram escolhidos alguns valores de nível para analisar seus dados. Foi possível observar o comportamento do nível durante o controle através do gráfico. No programa mostrado na “Figura 10” há na primeira etapa, à esquerda, o controlador PID que recebe setpoint e nível em milímetros em sua entrada.
Em sua saída o valor é ligado ao DAQ Assistant, localizado na próxima etapa da programação, no centro da figura. Ele é responsável pela comunicação do valor da saída do PID com a bomba de 0 a 10 volts do tanque, proporcionando o controle.
Na terceira etapa da programação, à direita da figura, chega o filtro Find Straight Edge que recebe dados da imagem vinda do Vision Assintant, esses dados são de interesse da programação, porém, para encontra-los é necessário passar por algumas etapas de filtragem, devido ao Find Straight Edge possuir uma grande quantidade de informações da imagem tratada. Para o controle e indicação do nível, será necessário apenas um valor, que é o valor do eixo Y. Obtendo esse valor, ele é submetido a uma equação de equivalência, que tem por finalidade gerar a indicação em milímetros (Nível mm), retornando posteriormente para o controle PID.
Figura 10 – Diagrama de Blocos utilizado
4.2 Resultados dos testes
Durante os testes foi observado que o valor da variável do nível em milímetro (nível mm) ficou exatamente igual ao valor visualmente observado na régua de medição existente no tanque, mostrando que a medição do nível usando imagem foi precisa.
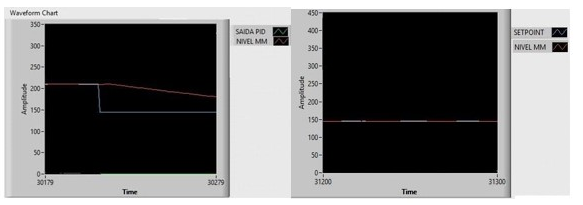
Aproveitando o ambiente de teste e foi feito uma aplicação de controle de nível usando um controlador PID, onde foi usado o valor do nível (nível mm) obtido através do processamento da imagem do tanque. Pelo resultado visto na “Figura 11”, o nível seguiu o setpoint e o alcançou, demostrando que os dados obtidos podem ser usados para várias aplicações na área de controle.
Figura 11 – O nível seguindo e alcançando o setpoint
5 CONSIDERAÇÕES FINAIS
Este artigo demonstra a utilidade do uso da câmera e da aquisição de imagens. Através do programa LabVIEW é possível usufruir de diversas ferramentas para tratar e filtrar imagens. No ambiente de estudo esse método pode ser aproveitado para disciplinas de controle, pois permite que o aluno se desenvolva no uso da captação e tratamento da imagem como função de sensor, diversificando seus conhecimentos.
O uso de imagem gera naturalmente motivação aos alunos, pois esta aplicação pode ser utilizada em disciplinas introdutórias do curso de engenharia de controle, em uma fase do curso composta de disciplinas teóricas, tendo como resultado maior interesse no curso e diminuição da evasão.
REFERÊNCIAS BIBLIOGRÁFICAS
Albuquerque, M. P. Processamento de Imagens: Métodos e Análises, 2000.
Batista, L. G.; Alves, R. S.; Martins, G. S.; Cuadros, M. A. S. L. Localização de Robôs Móveis Usando Landmarks, 2016.
Filho, O. M.; Neto, H. V. Processamento digital de imagens, 1999. Getting Started with LabVIEW, National Instruments (NI), 2009.
Gonzales, R. C.; Woods, R. C. Processamento digital de imagens, 2010.
Pereira, R. P. A; Almeida, G.M; Salles, J.L.F; Munaro, C.J; Cuadros, M.S.L. Ambiente Para Simulação e Aplicação Numa Planta Didática de um Controlador PID com Anti Wind-Up, Anais: XXXIX – Congresso Brasileiro de Educação em Engenharia. Blumenau: FURB, 2011.
Pimentel, L. S. S.; Cuadros, M. A. S. L.; Almeida, G. M.; Amaral, R. P.; Gamarra, D. F.T… Development of a Mobile Robotics Platform for Navigation Tasks Using Image Processing. In: AsiaPacific Computer Science and Application Conference (CSAC 2014), 2014, Shanghai. Asia-Pacific Computer Science and Application Conference (CSAC 2014), 2014.
1mfurtadodemendonca@gmail.com
Aracruz Energia – Rua Papuana, 105B – Coqueiral
29.199-084 – Aracruz – ES
296danielromero@gmail.com
3hagadman@gmail.com
4felipedasilvapaiva@gmail.com
5rapha.belizario@gmail.com
6raveh.soares@gmail.com
7rogeriop@ifes.edu.br
8marcoantonio@ifes.edu.br
9gmaia@ifes.edu.br
10gvcurcio@ifes.edu.br
Instituto Federal de Educação, Ciência e Tecnologia do Espírito Santo – Campus Serra (IFES/Serra)
Rodovia ES-10 – Km 6,5 – Manguinhos- 29164-231 – Serra – ES