REGISTRO DOI: 10.69849/revistaft/fa10202501261108

Carlos Costa da Silva1
RESUMO
A rápida evolução das ciências e tecnologias digitais tem transformado profundamente a maneira como a humanidade interage com inovações, especialmente na área da saúde. A robótica e a inteligência artificial (IA) emergem como ferramentas poderosas em procedimentos médicos, prometendo maior precisão, segurança e eficiência. No entanto, surgem questionamentos sobre a real eficácia dessas tecnologias em comparação com as técnicas cirúrgicas tradicionais, principalmente considerando fatores como segurança, tempo operatório, recuperação pós-operatória e complicações. A problemática do estudo é: qual a eficácia da robótica em procedimentos cirúrgicos em comparação às abordagens tradicionais? A hipótese é que a robótica oferece benefícios em termos de precisão e segurança, mas enfrenta desafios como alto custo e tempo operacional prolongado. O objetivo principal é avaliar a eficácia e os benefícios da cirurgia robótica, comparando seus resultados com as técnicas convencionais. A justificativa para este estudo se baseia na necessidade de analisar criticamente os benefícios e limitações da tecnologia, fornecendo subsídios para a adoção generalizada da robótica na medicina. A metodologia adotada envolveu uma revisão sistemática da literatura, com pesquisa em bases como Google Acadêmico, Capes e SciELO, utilizando descritores como “robótica and cirurgias” e “inteligência artificial and medicina”. Foram definidos critérios de inclusão e exclusão, priorizando estudos de caso e artigos publicados entre 2010 e 2024. A pesquisa resultou na seleção de cinco artigos, cujos dados foram interpretados e discutidos, fornecendo uma visão abrangente dos resultados da cirurgia robótica. Portanto, a aplicação da robótica em procedimentos cirúrgicos demonstra notável eficácia em comparação às técnicas tradicionais, destacando-se pela segurança, precisão e benefícios na recuperação pós-operatória.
Palavras-chave: Robótica; cirurgia; inteligência artificial.
1 INTRODUÇÃO
A acelerada e inevitável expansão das ciências e tecnologias digitais tem transformado profundamente o acesso da humanidade a novas inovações, além de evidenciar cada vez mais a inserção dessas inteligências na adaptação de hábitos, prazeres e necessidades dos indivíduos. Por muitos anos, a mente humana já considera a autonomia de instrumentos, ferramentas e dispositivos, e o contínuo avanço das novas tecnologias comprova a presença de autômatos em diversas áreas, com o propósito de auxiliar e intervir em diferentes procedimentos e práticas.
Abdalla et al. (2013) afirmam que as abordagens cirúrgicas minimamente invasivas demonstraram eficácia na redução das incisões abdominais, resultando em menos desconforto para os pacientes, melhores resultados estéticos, menor duração das operações e diminuição do tempo de recuperação. Os recentes avanços na tecnologia robótica têm se destacado por proporcionar movimentos mais intuitivos, além de maior precisão e exatidão durante esses procedimentos, em um ambiente que oferece mais estabilidade e conforto para os cirurgiões.
Assim, tem-se a seguinte problemática: Qual é a eficácia da aplicação da robótica em procedimentos cirúrgicos em comparação às técnicas tradicionais, considerando fatores como segurança, tempo operatório, recuperação pós-operatória e complicações?
Para Elias et al. (2024), a aplicação da robótica em procedimentos cirúrgicos proporciona melhores resultados em termos de precisão, segurança e recuperação pós-operatória quando comparada às técnicas cirúrgicas tradicionais, apesar de apresentar desafios como o custo elevado e o tempo operatório prolongado.
O presente artigo tem como objetivo realizar uma revisão sistemática para avaliar a eficácia e os benefícios da robótica em procedimentos cirúrgicos, comparando seus resultados com as técnicas cirúrgicas convencionais, levando em consideração fatores como segurança, tempo operatório, complicações pós-operatórias e tempo de recuperação.
O avanço da inteligência artificial e da robótica na área da saúde tem promovido mudanças significativas nos procedimentos cirúrgicos, oferecendo aos cirurgiões maior precisão e controle. No entanto, apesar dos benefícios teóricos, a adoção generalizada da cirurgia robótica ainda enfrenta obstáculos, como o alto custo e a curva de aprendizado para os profissionais. Diante disso, é essencial uma análise sistemática dos resultados obtidos com essa tecnologia, a fim de determinar se os benefícios justificam os custos e os desafios associados, além de informar a tomada de decisões sobre sua utilização em larga escala.
2 REFERÊNCIAL TEÓRICO
2.1 A robótica e a inteligência artificial
A robótica e a inteligência artificial (IA) estão transformando de forma acelerada diversos setores da sociedade, em especial a indústria. De acordo com Amaral e Gasparotto (2021), antes de 2012, os avanços da IA seguiam a lei de Moore, dobrando a capacidade computacional a cada dois anos. Após 2012, esse ritmo acelerou drasticamente, com a capacidade das redes neurais dobrando a cada 3,4 meses, o que gerou resultados e expectativas inimagináveis. Esse crescimento exponencial foi impulsionado tanto pelo aumento de dados disponíveis quanto pela ampliação das capacidades computacionais.
Na robótica, a IA desempenha um papel crucial. Robôs cada vez mais sofisticados são capazes de executar tarefas complexas e colaborar com humanos, graças ao aprendizado de máquina e redes neurais. Porém, esses sistemas não são isentos de desafios. Problemas com a qualidade dos dados utilizados para o treinamento, como viés e rotulagem incorreta, podem distorcer o aprendizado, levando a resultados indesejados (Northcutt, Athalye e Mueller, 2021). Além disso, muitos algoritmos são especializados e inflexíveis, tornando-os suscetíveis a erros quando expostos a variações imprevistas.
Outro desafio é a falta de explicabilidade em muitas aplicações de IA. Muitas vezes, os algoritmos se comportam como “caixas pretas”, dificultando a compreensão de como chegaram a determinadas conclusões. Isso pode ser problemático, especialmente em sistemas críticos, onde a falta de transparência pode gerar riscos sérios. Além disso, a IA tende a perpetuar padrões do passado, já que os algoritmos trabalham com dados históricos, limitando sua capacidade de adaptação e inovação em novos contextos.
Apesar desses desafios, a IA continua a oferecer grandes oportunidades. O uso crescente de aplicações em nuvem e a Internet das Coisas (IoT) proporcionam um fluxo constante de dados que alimentam esses sistemas, trazendo benefícios tangíveis para consumidores e indústrias. Entretanto, é fundamental avançar em governança de dados, transparência e desenvolvimento sustentável da IA, garantindo que o uso dessas tecnologias contribua para a sociedade de maneira equitativa e responsável.
O futuro da IA e da robótica reside não apenas em avanços tecnológicos, mas também na capacidade de enfrentar esses desafios, promovendo um uso mais ético e consciente dessas ferramentas, com foco no desenvolvimento humano e sustentável.
2.2 Cirurgias mediada por robôs no Brasil
Segundo Filho, De Lemos e Zaganelli (2021), a cirurgia robótica tem ganhado destaque no Brasil nos últimos anos, sendo cada vez mais utilizada em procedimentos cirúrgicos complexos. Essa tecnologia minimamente invasiva reduz a necessidade de grandes incisões, diminuindo o risco de hemorragias e acelerando a recuperação dos pacientes. Além disso, oferece maior precisão cirúrgica, resultando em diagnósticos mais rápidos e intervenções em fases iniciais de doenças.
No Brasil, a introdução da cirurgia robótica ocorreu em 2008, inicialmente voltada para cirurgias cardíacas. Contudo, sua maior aplicação tem sido na área da urologia, especialmente em cirurgias de câncer de próstata. Em 2018, o número de robôs no país alcançou 45, um crescimento significativo em comparação à década anterior. O número de cirurgias robóticas também aumentou, com mais de 8 mil procedimentos realizados em 2019, consolidando o Brasil como o país com maior número de cirurgias robóticas na América Latina (Filho; De Lemos; Zaganelli, 2021).
A pandemia de COVID-19 gerou desafios ao setor de saúde, com o cancelamento de milhões de cirurgias eletivas em todo o mundo, incluindo no Brasil. Contudo, a cirurgia robótica se mostrou uma alternativa promissora para lidar com a demanda reprimida, especialmente em casos de câncer, que exigem intervenções rápidas e precisas (Filho; De Lemos; Zaganelli, 2021).
Especialistas destacam tanto as vantagens da cirurgia robótica, como a precisão dos movimentos e a visualização detalhada em 3D, quanto os desafios, como a ausência de sensação tátil e o custo elevado. Embora o uso de robôs tenha aprimorado a qualidade de diversas intervenções, ainda há um caminho a ser percorrido para tornar essa tecnologia acessível a todos os brasileiros.
3 METODOLOGIA
Foi realizada uma revisão sistemática seguindo quatro etapas principais, conforme fluxograma da figura 1. Na primeira etapa, que envolveu a definição do tema, e a formulação da pergunta de pesquisa, decidiu-se que o tema seria englobando a robótica, inteligência artificial, medicina e operações cirurgicas. Foram consultados artigos em diversas bases de dados, como o Google Acadêmico, Capes, PubMed e SciELO, abrangendo artigos tanto nacionais quanto internacionais, utilizando os descritores “robótica and cirurgias”, “robótica and medicina” e “inteligência artificial and medicina”..
Figura 1 – Metodologia
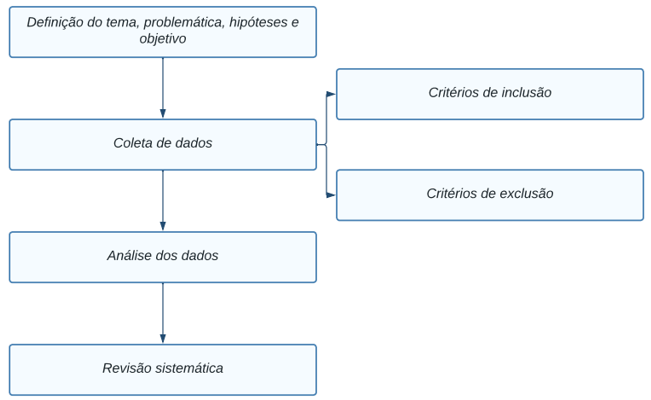
Fonte: o autor.
Na segunda etapa, foram definidos os critérios de inclusão e exclusão dos estudos. Apenas artigos escritos em inglês, espanhol ou português, publicados entre 2010 e 2024, foram incluídos, priorizando estudo de caso. Textos incompletos ou artigos que não estivessem disponíveis integralmente online foram excluídos da análise. Ademais, foram excluídos também artigos de revisão. Foram selecionados o total de cinco artigos científicos.
A terceira etapa consistiu na interpretação e discussão dos dados obtidos. Por fim, na quarta etapa, foi elaborada uma revisão/síntese do conhecimento com base nos resultados.
O processo de busca foi realizado inicialmente por meio de uma leitura exploratória de artigos, teses e monografias sobre o tema. Em seguida, as partes mais relevantes foram aprofundadas para embasar o estudo, sendo as informações e fontes extraídas para compor a análise da pesquisa.
4 RESULTADOS E DISCUSSÃO
| Autor (es) | Método | Objetivo do artigo | Conclusão |
| Abdalla et al. (2013) | De julho de 2008 a abril de 2010, pacientes foram admitidos para cirurgia abdominal e concordaram em ser operados com auxílio do robô por equipe treinada. Registraram-se o tempo necessário para completar a operação e o tempo de console. | Descrever a experiência com cirurgia abdominal assistida por robô meio brasileiro. | Quarenta e quatro pacientes foram submetidos a cirurgias, sendo a maioria para correção de hérnia hiatal ou procedimentos bariátricos. Com exceção de um caso, todos receberam alta no dia seguinte à operação. A única complicação registrada foi uma fístula decorrente do clampeamento videolaparoscópico durante uma cirurgia bariátrica. Não houve casos de hemorragia significativa, necessidade de reoperações ou conversão para técnicas laparoscópicas ou laparotômicas. O tempo médio total das cirurgias foi de 249,7 minutos (cerca de 4,1 horas), com um tempo médio de uso do console de 153,4 minutos (aproximadamente 2,5 horas). A perda sanguínea foi insignificante. Portanto, as cirurgias abdominais assistidas por robôs são seguras para os pacientes, apresentam baixo risco de sangramento e possuem um tempo de operação adequado, além de oferecerem mais ergonomia para os cirurgiões. |
| Terra et al. (2019) | Estudo retrospectivo incluindo pacientes com diagnóstico de carcinoma pulmonar de células não pequenas submetidos à ressecção anatômica por cirurgia robótica em seis hospitais brasileiros entre fevereiro de 2015 e julho de 2018. Os dados foram coletados retrospectivamente de prontuários eletrônicos. | Descrever morbidade, mortalidade e completude da ressecção associadas à cirurgia robótica para o tratamento de câncer de pulmão não pequenas células no Brasil, assim como sobrevida global e sobrevida livre de doença. | O estudo incluiu 154 pacientes, com idade média de 65,0 ± 9,5 anos (variação de 30 a 85 anos). O adenocarcinoma foi o tipo histológico mais comum, presente em 128 pacientes (81,5%), seguido pelo carcinoma epidermoide em 14 pacientes (9,0%). A lobectomia foi o procedimento cirúrgico mais realizado, em 133 pacientes (86,3%), enquanto a segmentectomia anatômica foi realizada em 21 pacientes (13,7%). O tempo médio de cirurgia foi de 209 ± 80 minutos. Complicações pós-operatórias ocorreram em 32 pacientes (20,4%), sendo a fístula aérea a mais comum, afetando 15 pacientes (9,5%). A mediana de permanência hospitalar foi de 4 dias (intervalo interquartil de 3 a 6 dias), e o tempo médio de uso de dreno foi de 2 dias (intervalo de 2 a 4 dias). Houve um caso de mortalidade operatória (0,5%). O tempo médio de seguimento foi de 326 ± 274 dias (variação de 3 a 1.110 dias). A ressecção foi completa em 97,4% dos casos, com uma mortalidade total de 1,5% (n = 3) e uma taxa de sobrevida global de 97,5%. Portanto, a ressecção pulmonar anatômica assistida por robótica para o tratamento do câncer de pulmão mostrou-se segura. Um seguimento mais prolongado é necessário para avaliar a sobrevida a longo prazo. |
| Leite et al. (2021) | Estudo retrospectivo a partir de um banco de dados envolvendo pacientes com diagnóstico de bronquiectasia e submetidos à cirurgia torácica robótica em três hospitais brasileiros entre janeiro de 2017 e janeiro de 2020. | Avaliar os resultados cirúrgicos da cirurgia robótica para doenças inflamatórias e infecciosas, determinando a extensão da ressecção, complicações pós-operatórias, tempo operatório e tempo de internação hospitalar. | Sete pacientes foram incluídos no estudo, com idade média de 47 ± 18,3 anos (variação de 18 a 70 anos). A maioria apresentava bronquiectasia não relacionada à fibrose cística (n=5), seguida de bronquiectasia tuberculosa (n=1) e abscesso pulmonar (n=1). Os procedimentos cirúrgicos realizados incluíram lobectomia (n=3), segmentectomia anatômica (n=3) e bilobectomia (n=1). O tempo médio de console foi de 147 minutos (variação de 61 a 288 minutos), sem necessidade de conversão para toracotomia. Uma complicação pós-operatória foi registrada, consistindo em obstipação que exigiu lavagem intestinal. A mediana do tempo de uso de dreno torácico foi de 1 dia (variação de 1 a 6 dias), e a mediana da internação hospitalar foi de 5 dias (variação de 2 a 14 dias). A cirurgia torácica assistida por robótica para o tratamento de doenças inflamatórias e infecciosas mostrou-se viável e segura, apresentando baixo risco de complicações e morbidade. |
| Sayols, Narcís, et al., 2019 | O artigo apresenta um algoritmo de rastreamento visual preciso e robusto para a cirurgia fetoscópica de fotocoagulação a laser (FLP) no tratamento da Síndrome de Transfusão de Sangue Feto-Feto (TTTS). O método visa auxiliar os cirurgiões na localização da anastomose, coagulação e revisão, utilizando um sistema robótico teleoperado. O algoritmo calcula a posição relativa da ponta da ferramenta fetoscópica em relação à placenta, por meio do registro das estruturas vasculares locais. O processo é dividido em três etapas: processamento de imagem (filtragem, binarização e segmentação de estruturas vasculares), seleção de Pontos de Interesse (POIs) e registro de imagem entre imagens consecutivas. O sistema foi projetado para lidar com as imagens de baixa qualidade devido ao ambiente líquido e sujo na placenta e ao diâmetro pequeno da ótica do fetoscópio. | Sistema robótico teleoperado.para auxiliar cirurgiões na localização, coagulação e revisão das anastomoses | O sistema de rastreamento foi testado com sequências de vídeo reais de cirurgias FLP para TTTS e mostrou desempenho computacional em tempo real, guiando com precisão o robô sobre a superfície da placenta. O algoritmo é robusto, mesmo com imagens borradas e ruidosas, e é capaz de fornecer tradução, rotação do eixo da câmera e escalonamento a partir de imagens consecutivas em tempo real. A metodologia facilita a estabilização de imagens e a localização precisa de POIs, aumentando a precisão da fotocoagulação de anastomoses e reduzindo o tempo cirúrgico. Os próximos passos incluem o uso de imagens não comprimidas do sistema de visão fetoscópica e o rastreamento do fetoscópio por um rastreador magnético para comparar os resultados do algoritmo com a posição real do fetoscópio, além de otimizar o algoritmo para redução de tempo computacional. O sistema completo será testado em cenário cirúrgico real. |
| Dwyer, George, et al., 2019 | A pesquisa descreve o design e a operação de um endoscópio robótico multimodal com imagem óptica de ultrassom (OpUS) e câmera estéreo de luz branca. O endoscópio, com 6,2 mm de diâmetro, foi manipulado por um braço robótico KUKA LBR iiwa R820, com controle de movimento remoto. Foi utilizado um modelo de placenta em gel de cera para testes, e o endoscópio foi escaneado sobre o modelo em trajetórias raster e espiral. As imagens A-scans adquiridas pelo sensor OpUS foram processadas em B-scans e superfícies 3D. O desempenho do sistema foi avaliado em termos de repetibilidade e confiabilidade dos escaneamentos. | Apresentar o projeto, controle e operação de um endoscópio robótico multimodal | O estudo apresentou com sucesso um endoscópio robótico multimodal com sensores de imagem óptica e OpUS, capaz de gerar visualizações 3D de alta qualidade da vasculatura de um modelo de placenta. As imagens OpUS geradas foram as maiores apresentadas na literatura até o momento. A pesquisa destacou o potencial do sistema para aplicações clínicas, como assistência em cirurgias de coagulação a laser, e a necessidade de futuras melhorias, como a miniaturização do dispositivo e a integração de canais internos para sensor OpUS e laser terapêutico. |
Fonte: o autor.
Legenda: FLP: Fotocoagulação a Laser; TTTS: Síndrome de Transfusão de Sangue Feto-Feto; OpUS: Imagem Óptica de Ultrassom; POIs: Pontos de Interesse; A-scans: Imagens A (tipo de escaneamento usado para obter uma representação da estrutura interna); n = número de casos ou participantes no estudo); OpUS = Imagem Óptica de Ultrassom (um tipo de tecnologia de imagem combinando ultrassom e visão óptica); A-scan = Tipo de escaneamento usado em ultrassonografia, gerando dados de uma única dimensão; B-scan = Tipo de escaneamento usado em ultrassonografia que gera uma imagem bidimensional e 3D = Tridimensional (imagens ou modelos que possuem três dimensões).
Comparada às técnicas tradicionais, a cirurgia robótica apresenta várias vantagens, especialmente em termos de segurança, recuperação pós-operatória e controle de complicações, embora ainda enfrente desafios relacionados ao tempo de operação e aos custos. Os estudos revisados demonstram que a cirurgia robótica é segura, com uma incidência baixa de complicações graves. Por exemplo, Abdalla et al. (2013) relataram apenas um caso de fístula entre 44 pacientes submetidos a cirurgias abdominais assistidas por robô, enquanto Terra et al. (2019) observaram uma mortalidade operatória de apenas 0,5% em ressecções pulmonares robóticas. Leite et al. (2021) também destacaram um caso isolado de obstipação leve entre sete pacientes submetidos a cirurgia torácica robótica. Esses dados indicam que a robótica, em geral, apresenta um perfil de segurança superior, com um número reduzido de complicações graves em comparação às abordagens convencionais.
Embora os tempos operatórios em procedimentos robóticos tendam a ser mais longos, esses períodos são, em grande parte, considerados aceitáveis, dado o contexto de cada estudo. Abdalla et al. (2013) relataram uma média de 249,7 minutos para cirurgias abdominais, e Terra et al. (2019) observaram uma média de 209 ± 80 minutos para ressecções pulmonares. Apesar desses tempos mais extensos, a robótica se destaca pela precisão e controle, especialmente em procedimentos complexos, onde as técnicas tradicionais podem enfrentar maiores dificuldades devido à limitação da visão e da mobilidade. A capacidade de realizar movimentos mais precisos e com menor margem de erro é um dos grandes trunfos da cirurgia robótica, particularmente em operações delicadas e de alta complexidade.
Os benefícios da cirurgia robótica na recuperação pós-operatória também são evidentes. Abdalla et al. (2013) observaram que a maioria dos pacientes teve alta no dia seguinte à cirurgia, enquanto Terra et al. (2019) relataram uma mediana de quatro dias de internação após ressecções pulmonares. Leite et al. (2021) indicaram uma mediana de cinco dias de internação para pacientes submetidos a cirurgia torácica para doenças inflamatórias e infecciosas. Esses achados sugerem que a cirurgia robótica pode acelerar a recuperação, reduzir o tempo de hospitalização e contribuir para uma experiência pós-operatória menos traumática para os pacientes. Além disso, a ergonomia oferecida pela tecnologia robótica, que facilita a realização dos procedimentos, pode reduzir a fadiga do cirurgião e aumentar a eficiência, resultando em menores taxas de erro e complicações.
No entanto, apesar dos benefícios, os desafios persistem, especialmente em relação ao tempo operatório prolongado e aos custos elevados associados à robótica. A implementação em larga escala dessas tecnologias ainda enfrenta obstáculos financeiros e logísticos, e é necessário um número maior de estudos com acompanhamento a longo prazo, como sugerido por Terra et al. (2019), para avaliar os impactos reais em termos de sobrevida e qualidade de vida dos pacientes.
A robótica tem se mostrado promissora também em procedimentos altamente especializados, como a fetoscopia de fotocoagulação a laser (FLP) no tratamento da Síndrome de Transfusão de Sangue Feto-Feto (TTTS). Sayols et al. (2019) desenvolveram um algoritmo de rastreamento visual preciso que, combinado com a visão computacional em tempo real, permite uma localização extremamente precisa das anastomoses, melhorando a precisão da fotocoagulação e reduzindo a margem de erro. Isso destaca a aplicação da robótica na melhoria da precisão em procedimentos delicados e na minimização de riscos associados a erros humanos.
Ademais, o estudo de Dwyer et al. (2019) focou no desenvolvimento de um endoscópio robótico multimodal, que combina sensores de imagem óptica e ultrassom (OpUS), proporcionando visualizações detalhadas da vasculatura da placenta, um avanço significativo em relação às técnicas convencionais de visualização. A robótica, ao permitir o controle preciso do movimento do endoscópio, melhora a qualidade da imagem e a confiabilidade dos escaneamentos, o que é essencial em procedimentos sensíveis como a coagulação a laser.
Esses estudos reforçam que a robótica pode superar limitações das técnicas tradicionais, como a baixa qualidade de imagem e a dificuldade de controle em ambientes de operação desafiadores, como o interior da placenta. No entanto, desafios como a miniaturização dos dispositivos e a otimização dos sistemas para aumentar a velocidade e a eficácia das intervenções ainda precisam ser abordados. A combinação de imagens de alta qualidade e controle preciso do movimento do robô não só promete aumentar a segurança e a precisão nas cirurgias, mas também reduzir o tempo operatório e o risco de complicações pós-operatórias.
Em comparação com as técnicas convencionais, a robótica tem um grande potencial para melhorar os resultados cirúrgicos. Contudo, o sucesso da sua implementação em larga escala depende da contínua evolução tecnológica e da adaptação aos cenários clínicos reais. A utilização de robôs em cirurgias complexas representa uma inovação promissora, capaz de complementar e, em alguns casos, substituir os métodos tradicionais, proporcionando um futuro promissor para procedimentos mais seguros, eficientes e com menores taxas de complicações.
CONCLUSÃO
A aplicação da robótica em procedimentos cirúrgicos demonstra notável eficácia em comparação às técnicas tradicionais, destacando-se pela segurança, precisão e benefícios na recuperação pós-operatória. A baixa incidência de complicações graves e o desempenho positivo em cenários clínicos complexos reforçam seu potencial como alternativa de alta tecnologia na área médica. No entanto, desafios como o tempo operatório prolongado e os altos custos limitam sua acessibilidade e aplicação em larga escala. Para que a cirurgia robótica se consolide como uma prática amplamente adotada, é indispensável superar essas barreiras e promover estudos adicionais com maior número de participantes e acompanhamento a longo prazo. Tais investigações serão fundamentais para avaliar a sustentabilidade, os benefícios duradouros e a viabilidade econômica dessa abordagem no contexto global da saúde.
REFERÊNCIAS
AMARAL, Hudson Nunes; GASPAROTTO, Angelita Moutin Segoria. inteligência artificial: o uso da robótica indústria 4.0. Revista Interface Tecnológica, v. 18, n. 1, p. 474-486, 2021.
VILLAGRA, Jorge. Robótica e inteligencia artificial más humanas y sostenibles. Papeles de economía española, n. 169, p. 165-177, 2021.
SALARDI, Silvia. ROBÓTICA E INTELIGENCIA ARTIFICIAL: RETOS PARA EL DERECHO. Revista Derechos y Libertades, n. 42, 2020.
FILHO, Douglas Luis Binda; DE LEMOS, Letícia Pereira; ZAGANELLI, Margareth Vetis. Inteligência artificial a serviço do homem: o uso da robótica em práticas cirúrgicas e de reabilitação–desafios bioéticos (Artificial intelligence at the service of man: the use of robotics in surgical and rehabilitation practices–bioethical challenges Inteligencia artificial al servicio del hombre: el uso de la robótica. 2021.
ABDALLA, Ricardo Zugaib et al. Cirurgia abdominal por robótica: experiência brasileira inicial. ABCD. Arquivos Brasileiros de Cirurgia Digestiva (São Paulo), v. 26, p. 190-194, 2013.
TERRA, Ricardo Mingarini et al. Cirurgia torácica robótica no tratamento do câncer de pulmão de células não pequenas: experiência inicial no Brasil. Jornal Brasileiro de Pneumologia, v. 46, p. e20190003, 2019.
LEITE, PEDRO HENRIQUE CUNHA et al. Cirurgia torácica robótica para doença pulmonar inflamatória e infecciosa: experiência inicial no Brasil. Revista do Colégio Brasileiro de Cirurgiões, v. 48, p. e20202872, 2021.
ELIAS, João Victor Titonelli et al. IMPACTO DA CIRURGIA ROBÓTICA NA RECUPERAÇÃO PEDIÁTRICA. Brazilian Journal of Implantology and Health Sciences, v. 6, n. 6, p. 667-683, 2024.
DWYER, George et al. Robotic control of a multi-modal rigid endoscope combining optical imaging with all-optical ultrasound. In: 2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019. p. 3882-3888.
1Cursando pós-graduação em Automação Industrial e Robótica no Instituto Federal do Rio de Janeiro.
E-mail: carloscs.eng@gmail.com. https://buscatextual.cnpq.br/buscatextual/visualizacv.do;jsessionid=2D247035AA6CD0A905D321198FE372FC.buscatextual_0