REGISTRO DOI: 10.69849/revistaft/ra10202411082002
Bruno Gomes De Souza
Bruno Pinheiro Marciano Da Silva
Edimilson Dias Carvalho.
Prof.º Orientador Me. André Luís Assumpção.
RESUMO
O artigo propõe a implementação de um sistema de seleção eletrônica para aprimorar a qualidade na indústria de medicamentos veterinários, destacando a eficácia das máquinas selecionadoras ópticas. A pesquisa aponta que a seleção manual apresenta problemas como erros humanos, ineficiência e altos custos, enquanto as máquinas automatizadas aumentam a eficiência, reduzem custos e melhoram a qualidade. O estudo também explora o uso de tecnologias como Arduino e sensores infravermelhos para desenvolver um protótipo que analisa e seleciona produtos com base em suas características, utilizando sensores para medir variações de reflexão para maior precisão na seleção.
Palavras-chave: seleção eletrônica, qualidade, indústria farmacêutica, medicamentos para animais, máquinas selecionadoras, tecnologia, Arduino, sensores infravermelhos, automação.
Abstract:
The article proposes the implementation of an electronic selection system to enhance quality in the veterinary pharmaceutical industry, highlighting the effectiveness of optical selection machines. The research points out that manual selection presents issues such as human errors, inefficiency, and high operational costs, while automated machines increase efficiency, reduce costs, and improve product quality. The study also explores the use of technologies like Arduino and infrared sensors to develop a prototype that analyzes and selects products based on their characteristics, utilizing sensors to measure reflection variations for greater selection accuracy.
Keywords: electronic selection, quality, pharmaceutical industry, animal medications, selection machines, technology, Arduino, infrared sensors, automation.
1. INTRODUÇÃO
O mercado brasileiro apresenta uma demanda crescente por tecnologias que otimizem os processos de seleção e melhorem a qualidade dos produtos (LOZANO; BONHO, 2021).
Nesse contexto, a seleção de produtos de qualidade, realizada por meio de sistemas tecnológicos, torna-se uma etapa fundamental para garantir eficiência na produção e segurança em todo o processo, reduzindo o número de produtos defeituosos e retrabalhos durante a fabricação (DUTRA, 2017).
O trabalho de Lozano e Bonho (2021) comprova a importância da utilização de sistemas de seleção tecnológicos para a melhoria da qualidade do produto, relatando a eficácia de uma máquina selecionadora de grãos que opera com sistemas vibratórios, ópticos e pneumáticos, permitindo a seleção precisa de diversos tipos de grãos.
Contudo, embora existam estudos como o de Lozano e Bonho focados em máquinas selecionadoras de grãos, observa-se uma adoção limitada de equipamentos semelhantes para a seleção de outros produtos como medicamentos. Este trabalho propõe uma análise detalhada sobre a importância e o funcionamento das selecionadoras ópticas na fabricação de medicamentos para uso animal. Essas máquinas eletrônicas desempenham um papel crucial no processo de leitura e seleção, utilizando tecnologia avançada para garantir a qualidade e a eficiência.
Com base em estudos recentes e experiências práticas, investigaremos os benefícios e as aplicações desse sistema, destacando seu impacto na produtividade e na qualidade. A pesquisa se fundamentará em uma revisão bibliográfica abrangente e na análise de casos reais, com o objetivo de fornecer uma visão holística sobre os diferentes aspectos relacionados às seletoras ópticas. Isso incluirá a discussão dos tipos de selecionadoras, seus princípios de funcionamento e os benefícios econômicos e sociais associados à sua implementação.
Além disso, este estudo abordará as perspectivas futuras para o desenvolvimento e aprimoramento das tecnologias de seleção, especialmente à luz dos avanços na automação e na inteligência artificial. Ao final, espera-se que este trabalho contribua para o conhecimento acadêmico e para o avanço tecnológico na indústria, oferecendo insights valiosos para pesquisadores, profissionais e empresas interessadas na otimização dos processos de seleção óptica.
Uma parte fundamental deste estudo será a exploração da integração de tecnologias emergentes, como o Arduino, juntamente com sensores infravermelhos, para a análise de formatos e cores. Através do desenvolvimento de um protótipo, a seleção será baseada na comparação da média de várias leituras organizadas em uma matriz. A análise de determinantes de matriz permitirá comparações com uma amostra de referência, facilitando a seleção de produtos que atendam a uma faixa aceitável de variação em relação à amostra original.
Chaves, (1998, apud Corrêia, 2008), descreveu que “o objetivo do controle de qualidade é alcançar no produto um padrão de qualidade seja a curto ou em longo prazo sem perder sua essência original. Acompanhando e realizando medidas ou ações durante a produção, processamento, armazenamento e comercialização do produto”.
2. Desafios e Oportunidades na Indústria de Medicamentos para Animais
Na indústria de medicamentos para animais, garantir a qualidade e segurança dos produtos é um desafio constante. Atualmente, a retirada de qualquer item defeituoso da linha produtiva é realizada manualmente por operadores, um processo que pode ser não apenas custoso, mas também propenso a erros humanos. Essa abordagem não só eleva os custos operacionais como pode colocar em risco a saúde animal e a reputação das empresas.
2.1 Problemas da seleção Manual de Defeitos na Indústria de Medicamentos para Animais
- Erros Humanos: A inspeção manual depende da atenção e habilidade dos operadores. Distrações ou fadiga podem resultar em falhas na detecção de produtos inadequados, permitindo que itens problemáticos cheguem ao mercado.
- Ineficiência: O processo manual consome tempo e limita a produtividade da linha de produção. Cada unidade deve ser verificada individualmente, o que pode atrasar a operação e aumentar os custos.
- Custos Elevados: A necessidade de uma equipe dedicada para monitorar e inspecionar os produtos representa um gasto significativo. Além disso, isso pode levar a perdas relacionadas a retrabalho e desperdício, impactando os lucros.
2.2 Selecionadoras: Solução Eficaz para a Indústria
As máquinas selecionadoras emergem como uma solução poderosa para os desafios enfrentados. Esses sistemas automatizados garantem que apenas produtos de qualidade sejam enviados ao mercado. Existem várias categorias de selecionadoras, cada uma com seu próprio princípio de funcionamento:
- Selecionadoras Ópticas: Utilizam visão computacional e sensores para analisar características como cor, forma e tamanho. Capturam imagens dos produtos e, em tempo real, identificam e rejeitam aqueles que não atendem aos critérios de qualidade.
- Selecionadoras por Peso: Medem o peso dos produtos e desviam aqueles que não estão em conformidade com as especificações. Essa abordagem é especialmente útil em indústrias onde a uniformidade é crítica.
- Selecionadoras Magnéticas: Detectam e removem contaminantes metálicos, assegurando que os produtos estejam livres de materiais indesejados que possam comprometer a segurança.
- elecionadoras de Fluido: Avaliam a viscosidade e consistência dos líquidos, garantindo que apenas os produtos adequados sejam liberados.
2.3 Benefícios da Implementação de Selecionadoras
A adoção de máquinas selecionadoras traz uma série de benefícios tanto econômicos quanto sociais:
- Aumento da Eficiência: Com a automação, o tempo de inspeção é reduzido, permitindo que as linhas de produção operem mais rapidamente e com menos intervenção manual. Isso resulta em maior produtividade e eficiência.
- Redução de Custos: A diminuição da falha humana e da necessidade de mão de obra para inspeção permite que as empresas reduzam significativamente seus custos operacionais, possibilitando o reinvestimento em pesquisa e desenvolvimento.
- Melhoria da Qualidade do Produto: Sistemas de seleção automatizados garantem que apenas produtos de alta qualidade sejam enviados aos consumidores, aumentando a satisfação do cliente e diminuindo o risco de recalls.
- Responsabilidade Social: Garantir a qualidade e segurança dos medicamentos contribui para a saúde e bem-estar dos animais, fortalecendo a confiança dos consumidores nas marcas e consolidando uma reputação sólida no mercado.
- Inovação Contínua: A implementação de tecnologias avançadas nas linhas de produção estimula a inovação e a pesquisa, criando oportunidades para o desenvolvimento de novos produtos e soluções mais eficazes.
Em suma, a automação por meio de máquinas selecionadoras não apenas transforma a eficiência e a qualidade na indústria de medicamentos para animais, mas também promove a sustentabilidade econômica e social. Com o compromisso de fornecer produtos seguros e eficazes, a indústria se posiciona para enfrentar os desafios futuros, aproveitando a inovação contínua e a evolução tecnológica. Assim, estamos apenas começando a explorar as vastas possibilidades que a automação e as tecnologias avançadas têm a oferecer.
3. Proposta de Implantação de um Sistema de Seleção Eletrônico para Melhoria da Qualidade em uma Indústria de medicamentos animal.
Consideramos dois sensores disponíveis no mercado para a plataforma Arduino:
o sensor Infravermelho de obstáculo com LM393 e o sensor TCRT5000, reflexivo infravermelho. Ambos os sensores funcionam de maneira similar, detectando objetos à sua frente, mas com características distintas que influenciam sua aplicação.
O sensor de obstáculo reflexivo infravermelho conta com dois LEDs: um LED emissor, que emite um feixe de luz em uma frequência não visível (de 10¹¹ Hz até 10¹⁴ Hz), e um receptor foto transistor, que capta a luz refletida por objetos próximos. A eficácia desse sensor é influenciada pela cor e pelo material do objeto; por exemplo, objetos brancos refletem melhor a luz do que objetos pretos.
Além disso, o sensor de obstáculo reflexivo infravermelho possui um potenciômetro de ajuste de sensibilidade, LEDs de indicação, saída digital e pinos de alimentação. Os pinos e componentes têm funções específicas, como alimentação, aterramento e saída de sinal, o que permite ajustes precisos para diversas aplicações. As Figuras 1 e 2 representam o sensor de obstáculos e o sensor reflexivo de infravermelho.
Figura 1 – Sensor Infravermelho de obstáculo
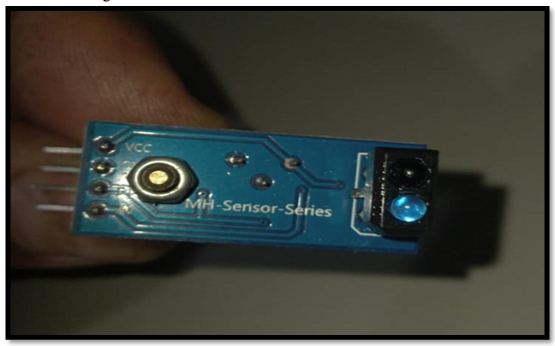
Fonte: próprio autor
Figura 2 – Sensor Reflexivo Infravermelho TCRT5000
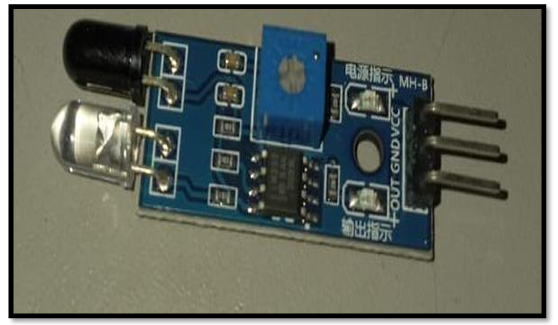
Fonte: próprio autor
Uma diferença notável entre os modelos é a distância operacional: o sensor Infravermelho de obstáculo com LM393 tem um alcance de 2 cm a 25 cm, enquanto o TCRT5000 opera de 0,2 cm a 3 cm. A saída analógica do TCRT5000, que retorna valores de 0 a 1023 no monitor serial da IDE do Arduino, é um fator decisivo na escolha do sensor, pois proporciona uma análise mais detalhada através de uma tabela de cores.
Optamos pelo Sensor Reflexivo Infravermelho TCRT5000 para o nosso projeto devido às suas características vantajosas que se alinham com nossas necessidades específicas.
Este sensor é amplamente reconhecido por sua alta sensibilidade e confiabilidade em detecções de proximidade e reflexões de superfícies.
3.1 – Metodologia utilizada para implantação do sistema de seleção eletrônico na empresa estudada.
A plataforma Arduino, por sua vez, é uma ferramenta que possibilita o desenvolvimento de projetos eletrônicos, unindo hardware e software para a criação de soluções inovadoras. Na literatura, há trabalhos que utilizam essas ferramentas para redes de sensores sem fio (MEJÍAS et al., 2017).
Neste sentido destacam-se as plataformas Raspberry Pi, BeagleBone, Phidget, Intel Edison e Arduino (GONZÁLEZ; CALDERÓN, 2019).
Dentre estas, a placa Arduino é o exemplo mais comum (ARDUINO, 2022).
Trata-se de uma plataforma que integra um software de plataforma cruzada, além de código aberto, e um hardware baseado em microcontrolador (JIN et al., 2018).
Tem proporcionado o desenvolvimento de protótipos eletrônicos, e já foram usadas em pesquisas para uma variedade de aplicações (THALHEIMER, 2013; KELLEY et al., 2014; BITELLA et al., 2014; KOENKA; SÁIZ; HAUSER, 2014).
Esta gama de aplicação deve-se à facilidade de uso e programação, aliada aos preços acessíveis dos componentes eletrônicos (BITELLA et al., 2014).
No tocante de atividades P&D e Academia, o Arduino tem se mostrado cada vez mais atrativo no desenvolvimento de ferramentas para aquisição de dados, automação e engenharia no geral (CALDERÓN et al., 2016).
Essa combinação permitirá que desenvolvamos um sistema de seleção eficiente e de alta qualidade, contribuindo para a melhoria contínua dos processos na indústria farmacêutica.
A placa tem como principal componente o microcontrolador, que é um tipo de processador bem menor do que o convencional. Ele executa os programas e avalia qualidade das entradas e saídas, ou seja, dos canais pelos quais é possível a comunicação entre mundo externo e digital.
Seu software é desenvolvido por meio de linguagem baseada em C/C++, usando um ambiente gráfico escrito em Java, sendo assim, a programação do Arduino dispensa equipamentos extras além de um cabo USB e conta dessas características, ele permite infinitas modificações, conforme a necessidade de cada usuário.
“CAVALCANTE, M. A.; TAVOLARO, C. R. C.; MOLISANI, E. O Arduino é uma plataforma que foi construída para promover a interação física entre o ambiente e o computador utilizando dispositivos eletrônicos de forma simples e baseada em softwares e hardwares livres. Resumidamente, a plataforma consiste em uma placa de circuitos com entradas e saídas para um microcontrolador AVR, um ambiente de desenvolvimento e o bootloader que já vem gravado no microcontrolador. O microcontrolador é constituído de um microprocessador, memória e periféricos de entrada/saída e pode ser programado para funções específicas, como, por exemplo, o controle de máquinas e diferentes automações. Existem outras plataformas construídas para microcontroladores, mas o Arduino tem se destacado no cenário mundial pela facilidade de programação, versatilidade e baixo custo. Mesmo para os que desejam interações de alto nível, o Arduino tem atendido às expectativas. (2011).”
A necessidade de usar a porta analógica (A0) porque nossas estratégias de programação requerem sensores que trabalham com dados que variam de 0V a 5V, (ao invés de 0 e 1, on off). O princípio da nossa programação seria mapearmos os dados que são emitidos pela porta (A0) que são convertidas automaticamente para valores entre 0 e 1023 porque o Arduino utiliza um conversor analógico-digital que possui uma resolução de 10 bits. Isso significa que ele pode representar (1024) valores diferentes — de 0 a 1023.
Quando um sinal analógico é lido através da função analogRead (), esse sinal é convertido em um valor digital dentro desse intervalo. Valores na entrada variam com base na tensão recebida, que para o Arduino normalmente varia de 0 a 5 volts.
Os sensores infravermelhos registram variações nos valores recebidos devido a diferentes propriedades de absorção e reflexão das superfícies em contato com a radiação. A cor dos objetos afeta como a radiação é refletida ou absorvida, o que resulta em leituras variáveis. Superfícies escuras tendem a absorver mais radiação do que superfícies claras, alterando assim o valor que o sensor retorna, se o valor emitido pelo emissor infravermelho é equivalente a 1023, e este raio se choca contra um ponto do corpo de amostra, e retorna o valor de 1023 ou algum valor muito próximo dele, isso significa que a cor nesta área é branca ou alguma variação de branco, geralmente, o branco reflete quase 100% da luz, enquanto cores mais escuras, como o preto, podem refletir menos de 10%. Cada cor tem uma refletância específica que pode ser medida (WENDLING, Marcel, 2010).
Lista de cores:
• Verde: 37
• Azul: 48
• Preto: 0
3.2 Testes do protótipo
Esta mudança de reflexão das superfícies dos corpos a serem selecionadas, nos permite criar uma relação entre os valores na porta (A0) e a lista de cores, esta relação cria valores que simulam digitalmente as cores do produto que esteja sendo selecionado pela máquina.
Para melhor compreensão de como é feito a captura dos dados em nosso projeto, abaixo podemos ver um esquema simplificado que é apresentado na Figura 3.
Figura 3 – Esquema simplificado de captura de dados
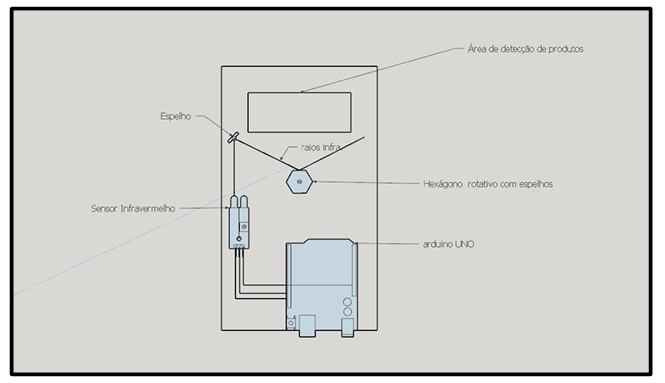
Fonte: próprio autor
O sensor infravermelho é alimentado através do Arduino, o sensor emite os raios infravermelhos sobre a face de um espelho, que reflete sobre outro espelho no formato de um hexágono, o hexágono é montado sobre uma base rotativa, que permite desviar os raios infravermelhos de maneira a formar um feixe no fundo da área de detecção de produtos a serem selecionados.
O feixe de luz é um conjunto de raios de luz que, tendo uma fonte comum, podem ser paralelos ou quase paralelos, como os rastros que a gente vê no céu depois de alguém soltar fogos de artifício.
A cada pequena mudança de angulação da posição do hexágono desvia de maneira mínima os raios infravermelhos, que se chocam com o fundo da área de detecção, volta para o receptor e gera um valor para o Arduino. Repetindo este processo formamos uma linha de dados, que são enviadas para o Arduino.
Conforme o produto passa por dentro da seletora óptica e através da área de detecção, várias linhas são geradas, criando assim uma matriz de dados, com dados da cor e o formato geral do produto.
Para analisar as costas do produto, outro conjunto deve ser montado em posição oposta à primeira e mais abaixo na estrutura do equipamento, para que um não interfira no outro. Este segundo conjunto alimenta uma segunda matriz equivalente à segunda face do produto, neste caso temos que cruzar estes dados também antes da tomada de decisão, se o produto está bom ou ruim de acordo com a amostra inicial. A Figura 4 apresenta a matriz de cores.
Tabela 1 – Matriz de cores
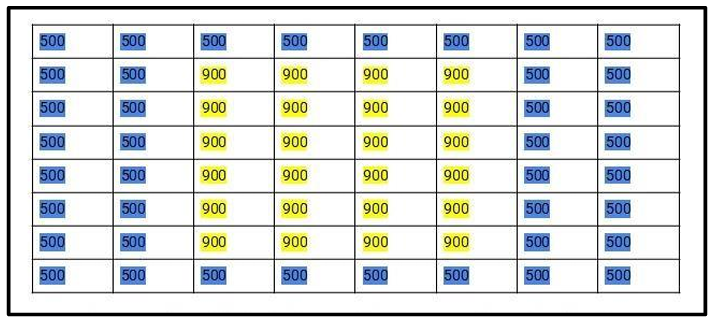
Fonte: próprio autor
O fundo da área de detecção é preto para gerar um contraste com o produto a ser selecionado, assim fornecendo melhores resultados durante as leituras, já que estes valores do fundo podem ser descartados para não entrar na matriz, ganhando tempo no processamento do Arduino. Se o produto for na cor do plano de fundo, devemos mudar a cor de fundo.
Explicação do Código
1. Bibliotecas e Definições
#include <Servo.h>
#include <Stepper.h>
• Essas bibliotecas permitem controlar servos (Servo.h) e motores de passo (Stepper.h).
Servo servo;
Servo servoRampa;
• Cria dois objetos servo e servoRampa, que serão usados para controlar os servos.
int matrizcadastro[8][8] = {0}; // Matriz agora é 8×8
• Define uma matriz 8×8 para armazenar os dados das leituras do sensor.
const int passosporVolta = 2048; // Passos por volta do motor de passo Stepper
mp(passosporVolta, 6, 7, 8, 9);
• Define o número de passos por volta para o motor de passo e cria um objeto mp para controlá-lo, utilizando os pinos 6, 7, 8 e 9.
#define pinoSensor1 A1
#define pinoSensorDigital 12
• Define os pinos que serão usados para o sensor (A1) e para um sensor digital (12).
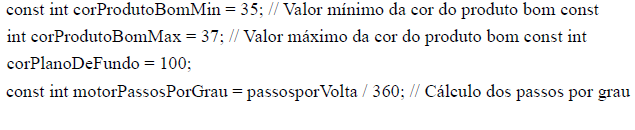
• Define limites para detectar o “produto bom” e a cor do plano de fundo. O cálculo dos passos por grau é feito para mover o motor de passo.
2. Função setup ()
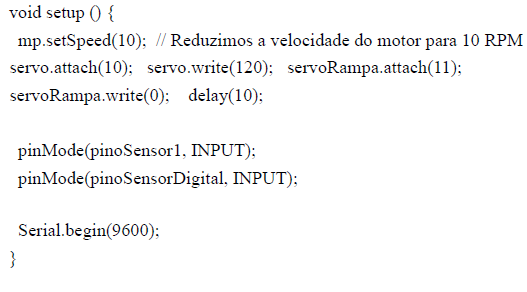
• Configura a velocidade do motor de passo, conecta os servos aos pinos 10 e 11, configura os pinos do sensor como entrada e inicia a comunicação serial a 9600 bps.
3. Função calcularMedianaSensor ( )
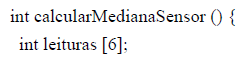
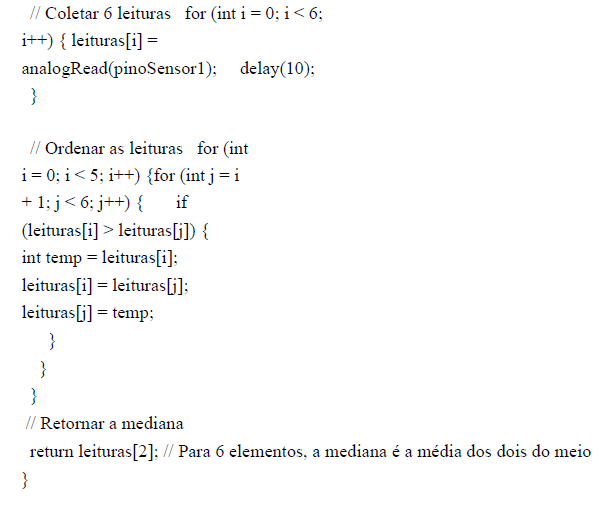
• Coleta 6 leituras do sensor, ordena essas leituras e retorna a mediana (o terceiro valor em um array ordenado de 6 elementos).
4. Função girar Motor (int graus)

• Calcula o número de passos a girar com base no ângulo solicitado e gira o motor.
5. Função controlar Rampa (int corDetectada)
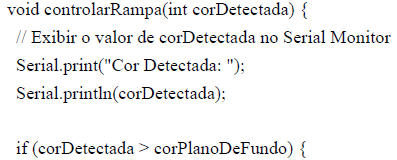
• Controla a posição da rampa com base na cor detectada, movendo-a para a posição correspondente ao produto bom ou ao descarte.
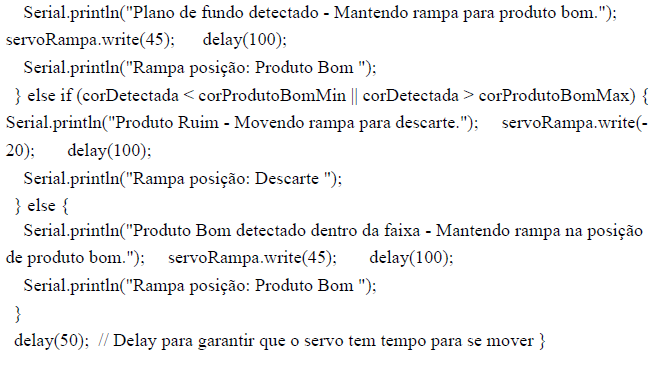
6. Função calcularDeterminante (int matriz[8][8], int n)
• Calcula o determinante de uma matriz 8×8. Para matrizes maiores que 2×2, utiliza a recursão para calcular determinantes de submatrizes.
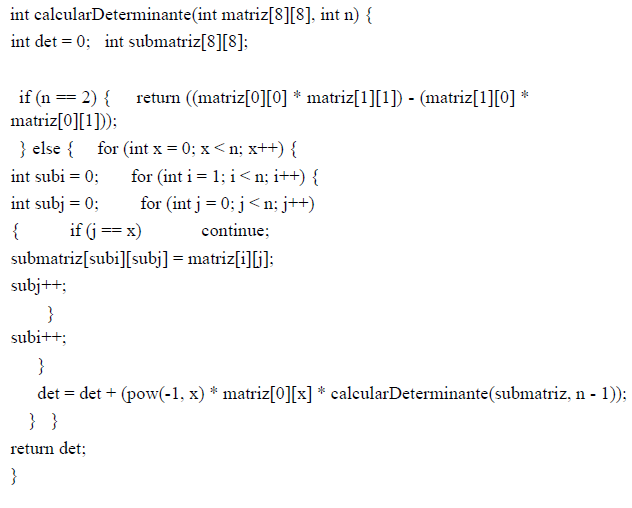
7. Função girarParaAlinharFuro ( )
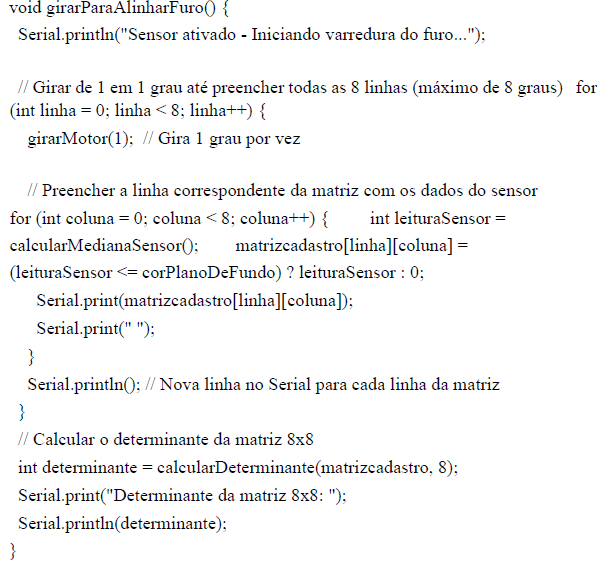
• Realiza uma varredura , preenchendo a matriz com as leituras do sensor e calculando o determinante após a coleta de dados.
8. Função girarAteSensorAtivar( )
9. Loop Principal
• O loop principal do Arduino chama a função girarAteSensorAtivar(), permitindo que o programa execute continuamente o processo de detecção e leitura.
Ligações Elétricas
1. Motor de Passo:
a. Conecte os fios do motor de passo aos pinos 6, 7, 8 e 9 do Arduino.
b. Conecte o terminal comum do motor ao GND.
2. Servos:
a. Conecte o servo motor principal ao pino 10 do Arduino.
b. Conecte o servo motor da rampa ao pino 11 do Arduino.
c. Conecte o fio de alimentação dos servos ao +5V e o GND ao GND do Arduino.
3. Sensor Analógico (Infravermelho):
a. Conecte o terminal de sinal do sensor ao pino A1.
b. Conecte o terminal de alimentação ao +5V e o GND ao GND do Arduino.
4. Sensor Digital:
a. Conecte o terminal de sinal do sensor ao pino digital 12.
b. Conecte o terminal de alimentação ao +5V e o GND ao GND do Arduino.
4. RESULTADOS E DISCUSSÕES
A execução deste projeto de seletora óptica proporcionou uma valiosa experiência na aplicação prática de conceitos de engenharia, além de permitir um aprofundamento nas dificuldades inerentes à implementação e aos testes de sistemas baseados em microcontroladores, especificamente o Arduino. Durante o desenvolvimento, foram evidentes os desafios relacionados à lógica de programação e às interações matemáticas, que exigiram uma abordagem analítica e a adoção de soluções inovadoras.
A utilização de um sensor infravermelho revelou-se eficaz para a detecção de corpos de prova, embora tenha se mostrado sensível à potência do sinal e à distância em relação aos objetos a serem analisados. Observou-se que, em condições de teste sem iluminação externa, as leituras obtidas foram consideravelmente mais confiáveis. Adicionalmente, a angulação do sensor influenciou de maneira significativa os valores refletidos, enquanto a geometria e a coloração dos corpos de prova afetaram os dados recebidos pelo receptor. Os quatro corpos de prova, com características esféricas e maleáveis, apresentaram melhorias nas leituras após modificações em suas superfícies.
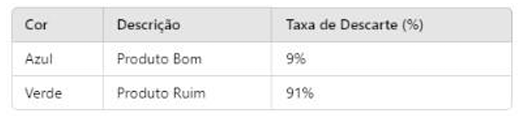
Abaixo contém uma tabela simples que representa os resultados dos testes na máquina, com a cor azul representando o “produto bom” e a cor verde representando o “produto ruim”. A tabela indica que, dos 93 testes realizados, 91% das vezes o corpo de prova verde foi descartado. A Tabela 1 apresenta os resultados dos testes realizados.
Tabela 2 – Resultados dos testes
Fonte: próprio autor
• Total de Testes: 93
• Descarte de Produto Verde: 91% (ou seja, 85 testes de produtos ruins foram descartados) • Descarte de Produto Azul: 9% (ou seja, 8 testes de produtos bons foram descartados)
4.1 Discussões
Com o intuito de otimizar o desempenho da máquina, foram realizadas alterações estratégicas no código, com foco na melhoria da velocidade de leitura. A remoção de cálculos redundantes e a implementação de um sistema de aquisição de dados mais ágil possibilitaram uma redução significativa no tempo de resposta, resultando em operações mais eficientes e efetivas. As dificuldades enfrentadas ao longo do projeto se transformaram em oportunidades para a equipe aprofundar seus conhecimentos técnicos sobre os componentes utilizados, como o Arduino, além dos princípios fundamentais de corrente, tensão elétrica e programação. Este processo de aprendizado contínuo foi crucial não apenas para a resolução de problemas, mas também para o desenvolvimento de uma compreensão mais robusta e crítica das tecnologias implementadas.
Os resultados obtidos não apenas ressaltam a relevância da reflexão infravermelha na seleção por cor e forma de produtos diversos na indústria, mas também sublinham a importância da adaptabilidade e do aprendizado em ambientes experimentais. Além disso, as inovações alcançadas durante o desenvolvimento deste trabalho abrem portas para futuras investigações, como a criação de um sistema de visão computacional que poderia permitir a movimentação autônoma de robôs em ambientes complexos. Essa evolução tecnológica pode também incluir a implementação de canhões de luz que se movem por coordenadas, utilizando motores de passo e lasers, para aplicações em eventos e festas.
Assim, o projeto possui um grande potencial para contribuir para a evolução de métodos de análise e detecção mais eficazes, pavimentando o caminho para a criação de sistemas de escaneamento 3D que podem transformar a forma como a indústria realiza a inspeção e a seleção de produtos. Portanto, a continuidade do desenvolvimento em seleção óptica e a integração de tecnologias emergentes são promissoras, garantindo um impacto significativo no setor. Exemplos como o da Boston Dynamics, que começou com projetos modestos e evoluiu para tecnologias robóticas de ponta, demonstram que a inovação e a pesquisa contínua podem levar a avanços significativos nas fronteiras da robótica. Essa trajetória inspira novas gerações de engenheiros a explorar as possibilidades da robótica e da automação (GUIZZO, Erico ,2019).
5. CONCLUSÃO
Considerando a evolução contínua da tecnologia e as melhorias implementadas durante o desenvolvimento deste projeto, a viabilidade da máquina a médio prazo é promissora. A adoção de soluções inovadoras e a adaptabilidade da equipe demonstraram a capacidade de responder a desafios técnicos, o que é crucial em um campo em constante evolução como a automação e a análise óptica.
A análise de 93 testes realizados revelou que o corpo de prova azul, classificado como produto bom, foi incorretamente descartado em algumas ocasiões. Dos testes, 91% das vezes o corpo verde, classificado como produto ruim, foi corretamente descartado, enquanto a ocorrência de descarte do corpo azul sugere a necessidade de refinamento nas definições de cor e sensibilidade do sistema. Os possíveis motivos para o corpo azul ter sido considerado como produto ruim incluem:
• Reflexão inadequada: O corpo azul pode ter apresentado um padrão de reflexão que se aproximou do limiar de detecção do sensor, levando a leituras erradas.
• Interferência de iluminação: Condições de iluminação variáveis podem ter impactado a precisão da leitura de cores, afetando o desempenho do sistema.
• Ajustes necessários no software: O algoritmo responsável pela detecção de cores pode precisar de ajustes finos para diferenciar melhor entre tons semelhantes.
Esses resultados enfatizam a importância de um contínuo ajuste e calibração do sistema para assegurar que produtos bons não sejam descartados, o que impacta diretamente na eficiência e na confiabilidade da máquina.
O aprimoramento da velocidade de leitura e a confiabilidade nas medições indicam que o sistema pode ser escalado e aplicado em contextos industriais, onde a eficiência e a precisão são fundamentais. A possibilidade de integrar novos sensores, como o sensor de cor, poderá expandir ainda mais as funcionalidades da máquina, permitindo uma análise mais abrangente e precisa dos produtos. Esse sensor poderá proporcionar uma detecção de cores mais precisa, ajudando a minimizar erros e a aumentar a taxa de sucesso na triagem dos produtos.
Além disso, o entendimento aprofundado dos componentes utilizados e a experiência adquirida pela equipe podem facilitar futuras colaborações e inovações, ampliando o impacto do projeto na indústria. Portanto, a continuidade do desenvolvimento e a pesquisa na área de seleção óptica podem resultar em avanços significativos, não apenas em termos de eficiência operacional, mas também na criação de soluções mais sustentáveis e tecnológicas.
REFERÊNCIAS BIBLIOGRÁFICAS
BIANCHI, H. H.; PARRILLO, M. J. Infrarred Reflection Characteristics of Colored Coatings. International Journal of Thermophysics, 2020.
BITELLA, G.; ROSSI, R.; BOCHICCHIO, R.; PERNIOLA, M.; AMATO, M. A Novel Low Cost Open-Hardware Platform for Monitoring Soil Water Content and Multiple SoilAir-Vegetation Parameters. Sensors, v. 14, n. 10, p. 19639-19659, 2014.
CHAVES, L.S. Avaliação da implementação de uma ferramenta de controle-BPF em empresas registradas junto CISPOA. 2014. Trabalho de Conclusão de curso 45 (Especialização em Produção, Tecnologia e Higiene em Produtos de Origem Animal) Universidade Rio Grande do Sul. Porto Alegre 2014.
CALDERÓN, A. J.; GONZÁLEZ, I.; CALDERÓN, M.; SEGURA, F.; ANDÚJAR, J. M. A new, scalable and low cost multi-channel monitoring system for polymer electrolyte fuel cells. Sensors, v. 16, n. 3, p. 349-368, 2016.
CAVALCANTE, M. A., TAVOLARO, C. R. C., & MOLISANI, E. (2024). Física com Arduino para iniciantes. Desenvolvimento em Ensino de Física, Grupo de Pesquisa em Ensino de Física, Pontifícia Universidade Católica de São Paulo, São Paulo, SP, Brasil e Universidade Federal do Rio Grande do Sul, Porto Alegre, RS, Brasil.
DUTRA, M. N. Implementação da análise de perigos e pontos críticos de controle (APPCC) em indústria de farinhas e pré-misturas. Monografia – UNIVERSIDADE FEDERAL DO RIO GRANDE DO SUL. Curso de graduação em Engenharia de Alimentos, Porto Alegre, 2017.
GUIZZO, Erico. Aos trancos e barrancos: Um olhar exclusivo sobre como a Boston Dynamics está redefinindo a agilidade dos robôs. IEEE Spectrum, v. 56, n. 12, p. 3439, 2019.
GONZÁLEZ, I.; CALDERÓN, A. J. Integration of open source hardware Arduino platform in automation systems applied to Smart Grids/Micro-Grids. Sustainable Energy Technologies and Assessments, v. 36, n. 100557, 2019.
JIN, H.; QIN, Y.; PAN, S.; ALAM, A. U.; DONG, S.; GHOSH, R.; DEEN, M. J. Opensource low-cost wireless potentiometric instrument for pH determination experiments. Journal of Chemical Education, v. 95, p. 326-330, 2018.
KOENKA, I. J.; SÁIZ, J.; HAUSER, P. C. Instrumentino: An open-source modular Python framework for controlling Arduino based experimental instruments. Computer Physics Communications, v. 185, p. 2724-2729, 2014
KELLEY, C. D.; KROLICK, A.; BRUNNER, L.; BURKLUND, A.; KAHN, D.; BALL, W. P.; WEBER-SHIRK, M. An affordable open-source turbidimeter. Sensors, v. 22, p. 7142- 7155, 2014.
LIMA, Kássio M. G.; RAIMUNDO JR., Ivo M.; SILVA, Andréa Monteiro S.; PIMENTEL, Maria Fernanda. Sensores ópticos com detecção no infravermelho próximo e médio. Instituto de Química, Universidade Estadual de Campinas, Campinas, SP, Brasil, 2024.
Lima, K. M. G., Raimundo Jr., I. M., Silva, A. M. S., & Pimentel, M. F. (2024). Near and mid infrared optical sensors. Instituto de Química, Universidade Estadual de Campinas, Campinas, SP, Brasil. Retrieved from
MCROBERTS, Michael. Arduino Básico-2ª edição: Tudo sobre o popular microcontrolador Arduino. Novatec Editora, 2015.
MEJÍAS, A.; HERRERA, R. S.; MÁRQUEZ, M. A.; CALDERÓN, A. J.; GONZÁLEZ, I.; ANDÚJAR, J. M. Easy handling of sensors and actuators over TCP/IP networks by open source hardware/software. Sensors, v. 17, p. 94-117, 2017
PALM, F.; GRÜNER, S.; PFROMMER, J.; GRAUBE, M.; URBAS, L. Open source as enabler for OPC UA in industrial automation. 2015 IEEE 20th Conference on Emerging Technologies & Factory Automation (ETFA), p.1-6, 2015.
THALHEIMER, M. A low-cost electronic tensiometer system for continuous monitoring of soil water potential. Journal of Agricultural Engineering, v. 45, p. 114119, 2013.
LOZANO, G. D.; BONHO, S. Utilização da abordagem Construir-Medir-Aprender da metodologia Lean Startup no desenvolvimento de um sistema eletrônico de uma máquina selecionadora. Revista Ilha Digital. Florianópolis-SC, 2021.
SAHAO JUNIOR, J e CRUZ, Vivaldo Francisco da. Algoritmo para obtenção da fórmula para o determinante de uma matriz quadrada de qualquer ordem. 1985, Anais Campinas: Fundação Cargill, 1985. . Acesso em: 27 out. 2024.
VAN ZUILEN, R. A. W. Optical Properties of Materials in the Infrared Region. Applied Optics, 2020.
WENDLING, Marcelo. Sensores. Universidade Estadual Paulista. São Paulo, v. 2010, p. 20, 2010.