REGISTRO DOI: 10.69849/revistaft/pa10202410251454
Ezequias Junior Silva De Souza
Orientador(a): Maria Dos Anjos Fernandes Pacheco.
RESUMO
Este trabalho apresenta o desenvolvimento de um protótipo de baixo custo para auxiliar na atracação de transportes fluviais, utilizando um sensor de aproximação baseado em tecnologia ultrassônica para medir a distância entre a embarcação e o ponto de atracação de forma a garantir segurança durante a ancoragem. Para solucionar esta necessidade, foi construído um protótipo funcional utilizando um microcontrolador Arduino como unidade de controle central, integrado a um sensor ultrassônico HC-SR04 para medir distâncias, e um display de 7 segmentos para exibição dos dados coletados em tempo real. O sistema permite que o capitão tenha uma leitura clara da distância restante durante a ancoragem, apoiando a manobra de forma segura. Foram realizadas também análises das distâncias medidas pelo sensor para avaliar a precisão e o funcionamento do protótipo. Os resultados obtidos demonstraram a viabilidade do sistema proposto, que utiliza componentes eletrônicos de baixo custo para medição e exibição da distância entre a embarcação e o local de atracação. Sua implementação oferece uma alternativa acessível para auxiliar na navegação segura em transportes fluviais, especialmente em comunidades ribeirinhas com recursos limitados. O estudo contribuiu ainda para discutir novas aplicações da tecnologia, visando o aprimoramento do transporte aquaviário no país.
Palavras-chave: baixo custo, navegação, senor, sistema de aproximação, transportes fluviais.
ABSTRACT
This work presents the development of a low-cost prototype to assist in the docking of river transport, using an approximation sensor based on ultrasonic technology to measure the distance between the vessel and the mooring point in order to guarantee safety during anchoring. To solve this need, a functional prototype was built using an Arduino microcontroller as a central control unit, integrated with an HC-SR04 ultrasonic sensor to measure distances, and a 7-segment display to display the data collected in real time. The system allows the captain to have a clear reading of the remaining distance during anchoring, supporting the maneuver safely. Analyzes of the distances measured by the sensor were also carried out to evaluate the precision and functioning of the prototype. The results obtained demonstrated the viability of the proposed system, which uses low-cost electronic components to measure and display the distance between the vessel and the docking location. Its implementation offers an affordable alternative to assist in safe navigation in river transport, especially in riverside communities with limited resources. The study also contributed to discussing new applications of technology, aiming to improve water transport in the country.
Keywords: low cost, navigation, senor, approach system, river transport.
1 INTRODUÇÃO
A expansão das cidades e o aumento da necessidade de meios de transporte eficientes têm levado à procura de métodos alternativos de uso sustentável dos recursos naturais. O transporte fluvial parece ser uma boa maneira de atender à demanda por mobilidade, especialmente em regiões remotas do Brasil, devido à extensa rede de rios e lagos do país. Muitas embarcações locais dependem do uso de balsas para realizar o transporte de pessoas e cargas entre as margens. Contudo, o estacionamento nas balsas requer habilidade do capitão e ainda existe o risco de acidentes. Equipamentos profissionais com radares e sensores capazes de auxiliar nessa manobra são caros e inacessíveis para a maioria.
O microcontrolador Arduino é uma parte essencial de sistemas de navegação autônoma de transporte fluvial baratos, pois, funciona como uma unidade central neste tipo de projeto, integrando sensores e mecanismos de controle e interpretando os dados coletados para guiar a aproximação das embarcações com segurança. Através dele, é realizada a leitura dos dados de distância e posição (em centímetros ou metros) fornecidos por sensores como o sensor ultrassônico HC-SR04. Ademais, o Arduino coordena indicadores visuais e sonoros e executa algoritmos de navegação por meio de programação personalizada. Como afirmam os autores, este funciona como o “cérebro” do sistema de navegação, permitindo funções necessárias para a aproximação segura das embarcações (AlKarim e Saha, 2018, p. 441).
O problema de pesquisa que se delineia é: como desenvolver um protótipo de baixo custo para auxiliar na atracação de transportes fluviais, medindo a distância de aproximação e evitando acidentes, servindo como alternativa mais barata aos equipamentos profissionais existentes no mercado?
O objetivo geral deste trabalho é desenvolver um sensor de aproximação de baixo custo para auxiliar embarcações em seu estacionamento em balsas durante o transporte fluvial. Os objetivos específicos incluem a construção de um protótipo, a realização de testes para validar a eficácia do sistema e a análise dos resultados obtidos.
Um sistema barato para aproximação em transportes fluviais foi desenvolvido com componentes eletrônicos acessíveis. Um sensor de distâncias, uma placa microcontroladora, um display e meios de conexão entre elementos estão todos incluídos no projeto. A informação coletada é processada e apresentada de forma simples. Durante os testes em um protoboard, o layout do circuito é modulado. O intuito é marcar distâncias de forma funcional usando recursos básicos que podem ser melhorados posteriormente.
Este estudo é significativo porque pode ajudar a melhorar a mobilidade no transporte fluvial oferecendo uma maneira barata e sustentável para as embarcações estacionarem em balsas durante a travessia. Atualmente, manobras como a atracação exigem habilidade do capitão e envolvem riscos de acidentes. Os equipamentos com radares e sensores capazes de mapear a aproximação e orientar a ancoragem são caros.
A metodologia adotada envolve uma pesquisa bibliográfica para fundamentar o desenvolvimento do sistema, seguida pela construção de um protótipo e a realização de testes, visando avaliar parâmetros como precisão. Essa abordagem permitiu uma análise da viabilidade e eficácia do sistema proposto, contribuindo para a validação dos objetivos do trabalho.
2 METODOLOGIA
A natureza da pesquisa realizada neste trabalho é aplicada, experimental e descritiva. Esta é aplicada porque busca desenvolver uma solução menos onerosa para o problema da necessidade de auxiliar na atracação de transportes fluviaisl, por meio da construção de um sensor de aproximação de baixo custo. De acordo com Sarantakos (2005), esse tipo de pesquisa visa resolver problemas práticos por meio do desenvolvimento e teste de soluções.
Esta também é experimental porque envolve a criação e teste de um protótipo. Para Fink (2016), envolve a manipulação sistemática de variáveis sob condições controladas. A coleta de dados quantitativos sobre a precisão e taxa de sucesso pode ser realizada por meio de testes. No futuro, a proposta é integrar esse sistema com o motor da embarcação, permitindo um controle automatizado que aumentará ainda mais a segurança e a eficiência das operações de ancoragem. É esse método experimental que é necessário para confirmar a eficácia do sistema sugerido.
Por último, a pesquisa é descritiva, visto que, busca entender e detalhar as características e funções do sistema criado. Nas lições de Richardson (1999), essa metodologia tem como finalidade caracterizar as propriedades de um determinado grupo ou fenômeno. A descrição dos procedimentos, componentes utilizados e resultados obtidos fornece uma visão clara e completa do funcionamento do sistema e ajuda a divulgar tecnologias em específico.
A metodologia foi organizada em várias fases. Inicialmente, foi realizada uma revisão da literatura existente sobre sistemas de navegação autônoma. A pesquisa se concentrou em tecnologias acessíveis como microcontroladores e sensores ultrassônicos. Em seguida, foi desenvolvido um protótipo utilizando componentes eletrônicos baratos que incluíram sensores ultrassônicos, um microcontrolador Arduino e um display de visualização de dados. Durante os testes em um protoboard, o layout do circuito foi otimizado para permitir ajustes quando necessários.
O protótipo do sensor de aproximação passou por testes para garantir que seus parâmetros fossem precisos e funcionassem corretamente. Assim, a distância detectada pelo sensor ultrassônico foi medida. Uma das principais funções do protótipo para auxiliar na manobra de estacionamento, a medição precisa da distância de aproximação, foi examinada com base nos dados coletados durante os testes. Os pontos fortes e potenciais melhorias do novo sensor foram identificados por meio da análise. Os resultados dos testes ajudaram a avaliar a extensão dos objetivos do projeto.
3 RESULTADOS
3.1 Revisão da Literatura
3.1.1 O microcontrolador Arduino UNO R3 com Cabo USB (QUU-A2) na implementação do protótipo
A escolha do Arduino UNO R3 com cabo USB foi essencial para a implementação do sistema de aproximação. Este microcontrolador foi instalado em uma placa de protoboard, que facilitou a conexão com os demais componentes do circuito de uma forma modular. Isso possibilitou realizar testes e ajustes com flexibilidade durante o processo de desenvolvimento. O cabo USB do Arduino cumpriu dupla função. Primeiramente, proporcionou a alimentação elétrica necessária para o funcionamento do microcontrolador e dos demais dispositivos, já que foi conectado a uma fonte de 5V.
Dessa forma, foi possível desenvolver o código que iria controlar as funcionalidades do sistema, como a leitura dos dados do sensor ultrassônico e o acionamento do display. Após concluída a programação e os testes iniciais, o Arduino foi fixado de maneira definitiva na protoboard, garantindo a estabilidade durante os experimentos com o protótipo completo.
Figura 1 – Arduino UNO R3 com Cabo USB (QUU-A2)

Fonte: Google Imagens (2024)
3.1.1.1 Código para Medição de Distância com Sensor Ultrassônico e Display de 7 Segmentos
Esta seção do programa em Arduino gerencia um display de sete segmentos. Vamos examinar o código detalhadamente: Este código integra um sistema de controle para displays de sete segmentos, no qual números são apresentados de acordo com o valor de uma variável.
Figura 2 – Parte do código em Arduino parece controlar um display de sete segmentos
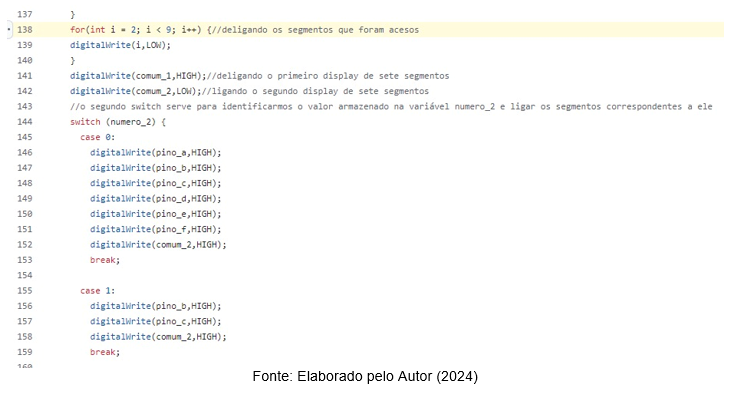
- For loop (linhas 138-140):

Esse laço for percorre os pinos do 2 ao 8, desligando todos eles (digitalWrite(i, LOW);). O comentário indica que está “deligando os segmentos que foram acessos”. A ideia é garantir que nenhum segmento esteja aceso antes de começar a exibir o próximo valor.
- Comando para controlar displays de sete segmentos (linhas 141-142):

Aqui, o código ativa o primeiro display de sete segmentos e desativa o segundo. Isso sugere que há dois displays e o controle é feito ligando um enquanto o outro é desligado.
- Switch case (linhas 143-160):
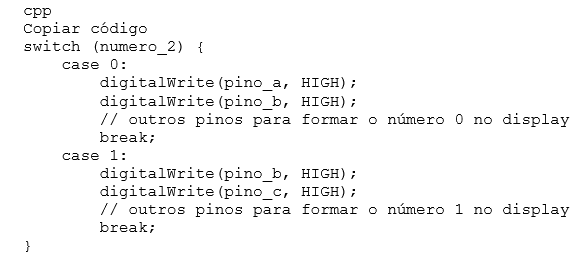
Esse bloco switch verifica o valor da variável numero_2. Dependendo de seu valor, ele acende os segmentos corretos para exibir o número no display. Por exemplo, se numero_2 for 0, os segmentos necessários para mostrar o número “0” são acesos. Se for 1, apenas os segmentos correspondentes ao número “1” serão acesos.
3.1.2 O protoboard KZ-C6 na conexão dos componentes eletrônicos utilizados no sistema
O protoboard KZ-C6 foi instalado como a plataforma principal para a conexão dos componentes eletrônicos utilizados no sistema, como o sensor ultrassônico HC-SR04, o display de 7 segmentos e os jumpers que conectam esses componentes ao Arduino UNO R3.
Com 400 furos, este modelo é suficiente para projetos de pequeno e médio porte, como o sistema de detecção de proximidade. Ele ocupa pouco espaço físico, o que torna o conjunto montado mais portátil. O protoboard possui faixas de alimentação que facilitam a conexão dos pinos de energia (Vcc e GND), organizando o circuito de maneira eficiente. Isso minimiza o risco de curto-circuito, além de permitir uma montagem mais limpa e organizada. Como o protoboard não exige solda, ele pode ser usado repetidamente em diferentes projetos, sendo uma escolha econômica para o desenvolvimento de protótipos e experimentação.
Figura 3 – Protoboard 400 Furos (KZ-C6)
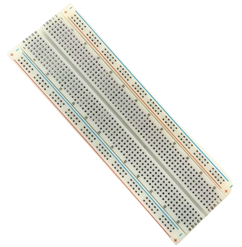
Fonte: Google Imagens (2024)
3.1.3 A escolha do Kit Cabo Jumper (TGV-J4)
Esses cabos são amplamente utilizados em prototipagem e circuitos eletrônicos, permitindo uma conexão rápida e confiável entre os componentes eletrônicos, como o sensor ultrassônico HC-SR04, o display de 7 segmentos, o Arduino UNO R3, e o protoboard. A facilidade de conexão sem a necessidade de soldagem, aliada ao comprimento adequado e à variedade de cores, contribuiu para a eficiência na montagem e organização do circuito. Esses cabos proporcionaram a flexibilidade necessária para ajustar e modificar o sistema conforme os testes e ajustes eram realizados, sem comprometer a funcionalidade do protótipo.
Figura 4 – Cabo Jumper Macho-Macho 10cm (TGV-J4)

Fonte: Google Imagens (2024)
3.1.4 Display 7 Segmentos 4 Dígitos Catodo Comum 0.56″ (MGY-K2)
Esse tipo de display foi ideal para mostrar a distância medida pelo sensor ultrassônico, permitindo que o operador visualizasse a proximidade de obstáculos em tempo real, algo essencial para operações de transporte fluvial. O display de 4 dígitos permite a exibição de números de até quatro casas decimais, o que é mais adequado para mostrar com precisão as distâncias medidas em centímetros (ex: 10.5 cm ou 150 cm). Isso oferece uma leitura clara e direta das informações essenciais para a navegação. O tamanho de 0.56 polegadas por dígito é suficiente para garantir que os valores exibidos sejam claramente visíveis à distância, sem comprometer o tamanho compacto do dispositivo como um todo. O display MGY-K2 é facilmente controlável via microcontroladores como o Arduino, o que permite um controle eficiente dos segmentos com a utilização de multiplexação, economizando portas digitais e simplificando o hardware.
Figura 5 – Display 7 Segmentos 4 Dígitos Catodo Comum 0.56″ (MGY-K2)

Fonte: Google Imagens (2024)
3.1.5 Sensor Ultrassônico HC-SR04 (FL-G3)
O sensor HC-SR04 oferece medições precisas com uma faixa de detecção que vai de 2 cm a 400 cm (4 metros), o que é mais do que suficiente para monitorar a proximidade de obstáculos em ambientes fluviais. Sua precisão é de cerca de 3 mm, o que permite que o sistema detecte variações sutis nas distâncias de forma confiável. É um dos sensores ultrassônicos mais acessíveis no mercado, oferecendo um equilíbrio excelente entre custo e desempenho, especialmente em projetos de baixo custo como este. Ele é amplamente utilizado em aplicações de robótica e automação, tornando-o uma escolha padrão para projetos com restrições orçamentárias. O sensor possui quatro pinos (VCC, GND, TRIG, ECHO), o que facilita a conexão com o Arduino UNO R3. A comunicação é simples, utilizando apenas dois sinais digitais (TRIG e ECHO), o que facilita a programação e controle, especialmente com as bibliotecas disponíveis para Arduino. Ele consome pouca energia, sendo alimentado com 5V diretamente do Arduino, o que é recomendado para sistemas portáteis ou que dependem de fontes de energia limitadas. Isso o torna altamente eficiente para projetos de longa duração em ambientes onde o consumo de energia deve ser otimizado.
Figura 6 – Sensor Ultrassônico HC-SR04 (FL-G3)

Fonte: Google Imagens (2024)
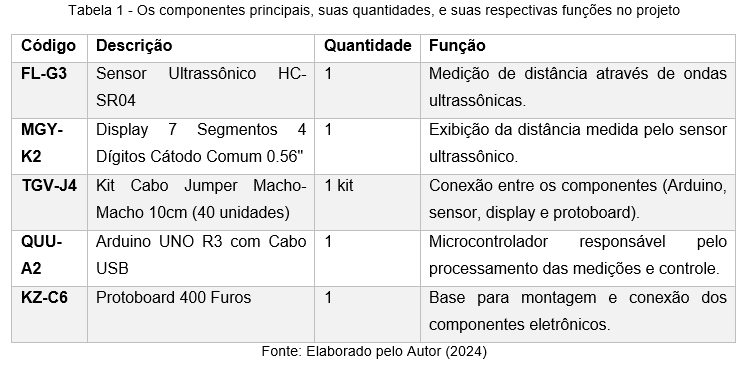
3.2 Materiais utilizados
A Tabela 1 demonstra os materiais utilizados no protótipo do sistema de aproximação de baixo custo para transporte fluviais:
3.3 Métodos
O desenvolvimento do protótipo seguiu uma abordagem sistemática e prática, envolvendo etapas de montagem eletrônica, programação e integração de sensores e atuadores. Sendo assim, o software foi desenvolvido utilizando as bibliotecas NewPing e LiquidCrystal do Arduino IDE para implementar, respectivamente, as funcionalidades de leitura do sensor ultrassônico e exibição no display. A integração entre hardware e software permitiu que os dados coletados pelo sensor HC-SR04 fossem processados pelo microcontrolador Arduino e exibidos no display, sendo controlado por um algoritmo desenvolvido para indicar a aproximação segura da embarcação. Esses componentes específicos possibilitaram a implementação prática do protótipo de baixo custo para auxiliar a navegação com segurança no ambiente fluvial.
Futuramente, o sistema será aprimorado para integrar o sensor ao controle eletrônico do motor, de forma que o navio possa regular automaticamente a velocidade conforme a distância medida, reduzindo ainda mais o risco de abalroamentos durante a manobra. Os testes realizados serão fundamentais para validar a funcionalidade básica do protótipo e subsidiar as melhorias que permitirão o seu uso efetivo no auxílio à navegação segura.
3.4 Teste do protótipo proposto
O teste do protótipo do sistema teve como objetivo principal avaliar a funcionalidade de medir a distância durante a manobra de atracação de forma a facilitar as operações de transporte e evitar possíveis acidentes. Dessa forma, o sensor ultrassônico HC-SR04 foi desenvolvido para medir a distância em centímetros ou metros e exibir no display em tempo real, auxiliando o capitão durante a ancoragem. Nesta primeira fase de testes, o foco foi verificar se o sensor conseguia realizar medições precisas e se o display apresentava os dados de forma clara para o operador.
3.4.1 Procedimento do teste
O teste do protótipo foi realizado de forma controlada, com o objetivo de validar a medição de distância e a exibição correta dessas informações no display de 7 segmentos. Como o sistema atual apenas mede a distância entre a embarcação e o ponto de aproximação, sem ainda acionar motores ou outros mecanismos de controle, os testes foram limitados ao ambiente de laboratório.
Preparação do ambiente: o sensor HC-SR04 foi instalado na frente do protótipo, apontado em direção ao ponto de aproximação simulado. Um objeto foi posicionado a uma distância inicial conhecido de um objeto fizo que representava o ponto de atracação.
Teste de leitura e distância: foram testadas várias distâncias entre 10 cm e 3 metros. À medida que o objetivo se aproximava, os valores medidos pelo sensor eram exibidos no display de 7 segmentos em tempo real, mostrando a distância restante em centímetros. As leituras exibidas no display foram comparadas com medidas manuais para verificar a precisão do sensor.
Limitações e cenário de teste: como o sistema atualmente não aciona motores ou realiza controle automatizado de velocidade, o teste foi limitado ao ambiente de laboratório e não incluiu cenários de aplicação real no transporte fluvial.
Fonte: Elaborado pelo Autor (2024)
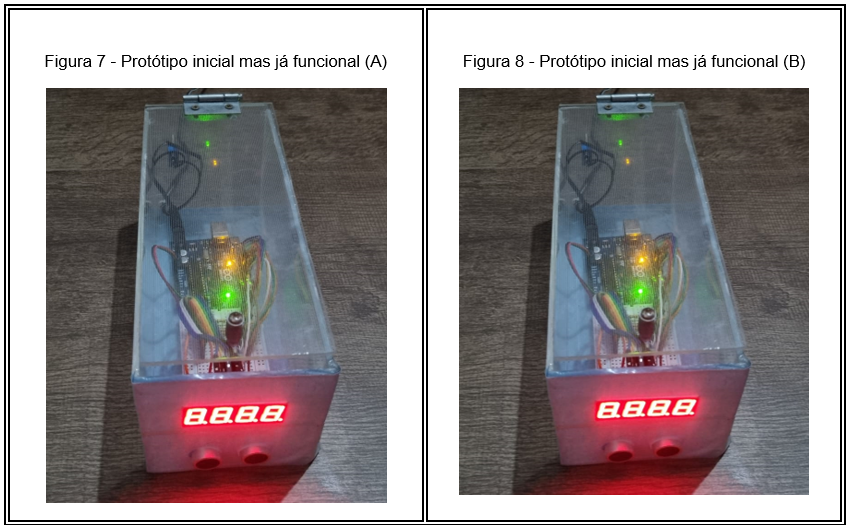
O uso de uma caixa transparente sugere a intenção de proteção contra condições ambientais adversas, sem impedir a visualização dos componentes eletrônicos, o que facilita o monitoramento e manutenção. A simplicidade do design indica que este é um protótipo inicial, mas já funcional, que pode ser ajustado e aprimorado conforme o feedback dos usuários em campo (Figuras 7 e 8).
Fonte: Elaborado pelo Autor (2024)
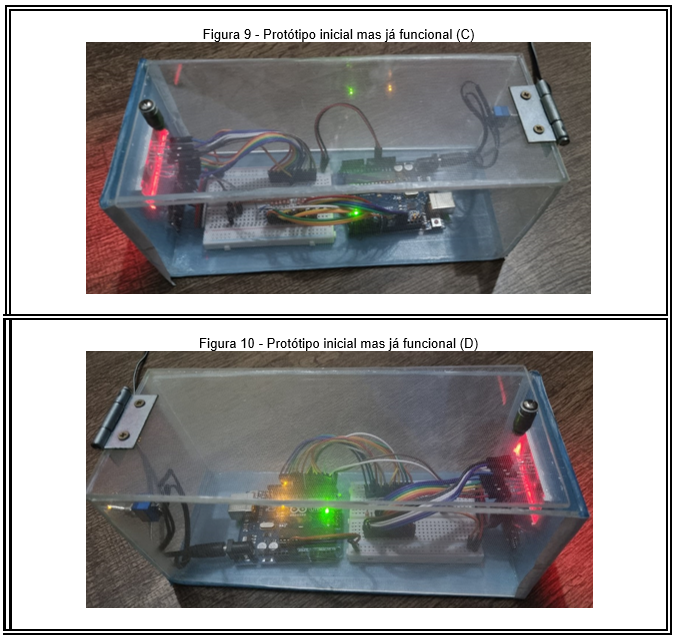
Nas Figuras 9 e 10 é visível a placa Arduino conectada a diversos cabos e componentes eletrônicos, como uma protoboard e o display de sete segmentos, que exibe as informações visíveis na parte frontal. As luzes indicadoras acesas na placa sugerem que o sistema está em operação.
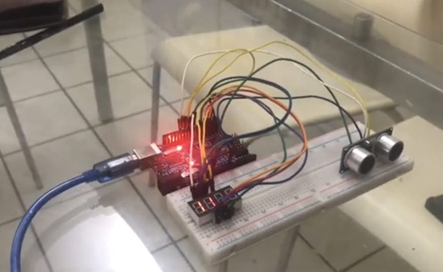
O design compacto e organizado permite fácil visualização dos componentes, e a tampa articulada indica que o acesso para ajustes ou manutenção é facilitado (Figura 11). Esse tipo de montagem é ideal para experimentos ou dispositivos protótipos em ambientes controlados, com o potencial de ser adaptado a várias finalidades práticas.
Figura 11 – Protótipo do sistema de aproximação
Fonte: Elaborado pelo Autor (2024)
3.4.2 Avaliação do desempenho
Os resultados dos testes mostraram que o sensor ultrassônico HC-SR04 foi capaz de medir a distância com precisão aceitável e exibir os valores de forma clara no display de 7 segmentos. Em distâncias curtas (até 3 metros), o sensor apresentou uma precisão suficiente para indicar a aproximação em centímetros. O display mostrou corretamente as informações, permitindo uma leitura rápida e clara das distâncias medidas.
Com base nos resultados desses testes iniciais, o sistema foi considerado funcional para medir e exibir distâncias em ambientes controlados. Para etapas futuras, será necessária a integração com outros componentes, como motores e algoritmos de controle automatizado, além da realização de testes em ambientes reais, como rios ou pontos de atracação.
Este procedimento simples de teste assegurou que a função principal do protótipo, a medição de distância, operasse conforme o esperado, preparando o caminho para melhorias e expansões futuras do sistema.
4 CONCLUSÃO
A pesquisa desenvolvida neste trabalho permitiu a criação de um sistema de aproximação de baixo custo para auxiliar embarcações em seu estacionamento em balsas durante o transporte fluvial. Através da integração de componentes acessíveis, como o microcontrolador Arduino e o sensor ultrassônico HC-SR04, foi possível construir um protótipo funcional que demonstra a viabilidade de soluções tecnológicas de baixo custo para o setor de transporte fluvial.
A construção do protótipo revelou-se um processo rico em aprendizado, não apenas em termos técnicos, mas também em relação à importância da prototipagem rápida no desenvolvimento de soluções práticas. A utilização de uma placa de protoboard facilitou a realização de ajustes e testes em tempo real, permitindo uma abordagem iterativa que aprimorou o design e a funcionalidade do sistema.
Os testes realizados validaram a precisão do sensor ultrassônico, que foi capaz de medir distâncias de forma confiável em ambientes controlados. Essa capacidade é indispensável para a segurança nas manobras de aproximação, uma vez que possibilita ao capitão ter uma noção clara da distância entre a embarcação e a balsa. A exibição dos dados em um display de 7 segmentos também se mostrou eficiente, garantindo que as informações fossem facilmente compreendidas durante as operações.
O protótipo demonstrou o potencial de ser uma solução acessível e econômica, o que é extremamente importante em regiões onde os recursos para aquisição de equipamentos profissionais são limitados. A combinação de componentes de baixo custo com uma abordagem de design simples torna o sistema uma alternativa viável para a melhoria da segurança no transporte fluvial, especialmente em comunidades ribeirinhas que dependem desse meio de locomoção.
As considerações sobre o protótipo também levantam a possibilidade de futuras melhorias e expansões. A integração de novas tecnologias, como sensores adicionais para detectar obstáculos em diferentes ângulos ou sistemas de alerta sonoro, poderia aumentar ainda mais a funcionalidade e a segurança do sistema. A automação do controle da velocidade da embarcação em resposta às medições de distância é uma evolução desejável que poderia ser explorada em projetos futuros.
Por fim, a experiência adquirida na construção e teste do protótipo enfatiza a importância de iniciativas acadêmicas que conectem teoria e prática. O desenvolvimento de soluções inovadoras como este protótipo não apenas contribui para o avanço da engenharia elétrica, mas também tem um impacto direto na melhoria da qualidade de vida das comunidades que utilizam o transporte fluvial. Espera-se que este projeto inspire outros pesquisadores e profissionais a explorar soluções criativas e acessíveis para os desafios enfrentados no setor de transporte.
REFERÊNCIAS
ALKARIM, Mohammad; SAHA, Shuvra. Arduino-based autonomous navigation system for mobile robots. Robotics, v. 7, n. 1, p. 11, 2018. Disponível em: https://doi.org/10.3390/robotics7010011. Acesso em: 19 nov. 2024.
SARANTAKOS, Soterios. Principles of social research. 3. ed. Basingstoke: Palgrave Macmillan, 2005.
FINK, A. Conducting research literature reviews: from the Internet to paper. 3rd ed. Thousand Oaks: Sage Publications, 2016.
RICHARDSON, R. Pesquisa social: métodos e técnicas. 3. ed. São Paulo: Atlas, 1999.