MOTION CONTROL OF A SEARCH LIGHT USING ARDUINO
REGISTRO DOI: 10.69849/revistaft/cs10202410232124
Fábio Italo Guimarães de Souza1
Maria dos Anjos Pacheco2
RESUMO
Este trabalho aborda a construção de um sistema para controlar um farol, usando um software de controle desenvolvido em Arduino, com o objetivo de auxiliar em atividades e trazer uma nova utilidade para o braço robótico, no caso manipulando o farol de busca, com baixo custo e de forma simples e eficiente. O sistema consiste em um controlador robótico articulado com dois graus de liberdade, composto por duas juntas rotativas e acionado por servomotores através de potenciômetros. O controle é realizado por meio da linguagem de programação C++.
Inicialmente, foi abordado sobre os robôs e as suas conexões, em seguida, serão detalhados os componentes do projeto e seus respectivos funcionamentos. A narrativa descreve, passo a passo, o processo de construção, bem como os resultados obtidos. A abordagem de trajetória da luz através do braço robótico contempla duas modalidades, a primeira modalidade de uso, é o usuário gravar o movimento e depois o sistema continua repetindo o mesmo movimento em loop, e a segunda, um controle manual livre via potenciômetro, permitindo que o usuário mova o braço direcionando a luz, para qualquer ponto desejado.
Palavras-chave: Farol de Busca, Braço Robótico, Arduíno.
ABSTRACT
This paper addresses the construction of a system to control a Search light, using control software developed in Arduino, with the aim of assisting in activities and bringing a new utility to the robotic arm, in this case manipulating the searchlight, at low cost and in a simple and efficient way. The system consists of an articulated robotic controller with two degrees of freedom, composed of two rotary joints and driven by servomotors through potentiometers. The control is performed through the C++ programming language.
Initially, the robots and their connections were discussed, then the project components and their respective functions will be detailed. The narrative will describe, step by step, the construction process, as well as the results obtained. The approach to the trajectory of the light through the robotic arm includes two modalities. The first modality of use is for the user to record the movement and then the system continues to repeat the same movement in a loop, and the second, free manual control via potentiometer, allowing the user to move the arm directing the light to any desired point.
Keywords: Search light, Robotic Arm, Arduino.
1. INTRODUÇÃO
Com o crescimento da robótica cada vez mais em todos os lugares do mundo, e em diversas áreas, como nas indústrias, comércios, medicina e em vários outros setores. E com o avanço da tecnologia, os robôs vêm ganhando cada vez mais espaço. E em meio a essas áreas, na área da segurança temos os faróis de busca.
Os faróis de busca cumprem um papel importante na segurança de operações aéreas, como o transporte de enfermos e missões de salvamento. Sua utilização é recomendada por regulamentos, destacando a importância desses dispositivos. Além disso, os faróis são essenciais para a navegação de pequenas embarcações, como as de pesca e recreio, especialmente durante a noite, quando indicam direções e tipos de embarcação. Apesar do avanço do Sistema de Posicionamento Global (GPS), os faróis continuam a ser mantidos por diversas nações, assim mostrando sua relevância.
E juntando os faróis e a robótica, tanto no contexto industrial quanto educacional, tem se mostrado fundamental na transformação de diversos setores da sociedade moderna. A crescente demanda por automação e eficiência está impulsionando a pesquisa e o desenvolvimento de sistemas robóticos avançados, que realizam tarefas complexas com precisão e confiabilidade. No entanto, a exploração da robótica, especialmente em ambientes educacionais, enfrenta desafios significativos, principalmente relacionados aos altos custos de manutenção e operação dos sistemas robóticos.
Substituindo humanos por robôs programados para executar tarefas, o mais conhecido e utilizado é o braço robótico, que pode ser tanto programado ou controlado manualmente, e ao utilizar robôs, diminui as tanto os erros que podem acontecer como também diminui o risco de acidente na área de trabalho. De acordo com LAMB (2015) “a automação industrial moderna utiliza diversos tipos de robôs em seu processo manufatureiro, o termo Automação pode ser definido como o uso de comandos lógicos programáveis e equipamentos mecanizados que substitui o trabalho manual e tomadas de decisão humana”.
Com essas duas áreas juntos, podemos criar muitas coisas inclusive um farol de busca com controle por potenciômetro, que ilustram como a tecnologia continua a moldar nossas vidas. A integração de inovações que garantem segurança e eficiência é essencial para o progresso, destacando a necessidade de abordagens que tornem essas tecnologias acessíveis a todos. Assim, podemos garantir um futuro mais seguro e educacionalmente rico, onde a tecnologia serve ao bem comum.
E para facilitar toda a criação de projetos, principalmente educacionais, por volta de 2005, um grupo de professores italianos que pertenciam ao grupo de pesquisa do Instituto de Design Interativo de Ivrea, que tinha como líder Massimo Banzi, criaram um dispositivo para facilitar o desenvolvimento de projetos, este dispositivo é o Arduino. Segundo BANZI (2015), “O Arduino é uma plataforma de computação física de fonte aberta para criação de objetos interativos independentes ou em elaboração com softwares do computador”.
O dispositivo Arduíno foi criado com o código aberto, assim facilitando a criação e inovação de projetos. Além de ser acessível, o Arduíno tem a capacidade de se conectar a diversos módulos periféricos, como sensores e atuadores. Assim sendo ideal para a educação e a criação de projetos variados. “A filosofia da fonte aberta promove uma comunidade que compartilha seu conhecimento generosamente” BANZI (2015).
1.1 Objetivos
1.1.1 Objetivos geral
Desenvolver um protótipo automatizado em forma de braço mecânico, que com um software de computador para controlar um braço robótico articulado, com variação de 0 a 180 graus, com juntas do tipo rotacional e na sua ponta utilizando uma luz representando um farol de busca.
1.1.2 Objetivo específico:
Construir o protótipo físico de um braço com dois eixos de movimentação utilizando materiais baratos;
Usar um software para o controle do posicionamento do micro servomotor;
Mostrar na prática o movimento do braço robótico, para iluminar um lugar específico.
1.2 Justificativa:
Neste trabalho mostramos a importância de evoluir a robótica, demonstrando por meio educacional, que a robótica ajuda também outras áreas, no atual cenário tecnológico. A robótica ajuda tanto na criação de novos meios de realizar trabalhos, mas também visa na melhoria do que já existe, melhorando a qualidade, precisão e eficiência. E buscamos também tornar a tecnologia mais acessível a todos os públicos, e com um bom custo-benefício.
Com a justificativa de buscar soluções acessíveis e eficientes, para melhor entendimento e desenvolvimento da robótica, e mostrando um braço robótico de 2 eixo como fonte de estudo educacional, para que facilite o entendimento básico da robótica na prática. E usando uma interface programável, para acrescentar ainda mais conhecimento na montagem de um projeto, e esses conhecimentos ajudam não só na parte acadêmica, mas também na área profissional.
Em um cenário de menor escala, a precisão e movimentos repetitivos são indispensáveis, assim mostra a importância da capacidade de movimentação de um braço robótico. Com isso em mente este trabalho ajuda a evoluir a robótica, mostrando formas de criação e otimização de sistemas robóticos, podendo levar o conhecimento para várias aplicações da robótica.
Por conta dos limites humanos, como dificuldades físicas ou condições extremamente desagradáveis, a robóticas vem evoluindo para substituir o homem nessas situações. E com essa emergência para criar projetos para substituir os humanos em várias condições, a robótica contribui em muitos fatores, como a diminuição dos acidentes e manter os seres humanos longe de ambientes perigosos.
E como os robôs articulados podem se movimentar de forma complexa, de acordo com sua programação, e conseguem manter o ritmo com precisão, segurança, qualidade, agilidade e eficiência, mesmo trabalhando por horas sem pausa. E sabendo disso, este trabalha desenvolvendo um robô articulado com um sistema mecânico simples que permita movimentar a articulação de braço robótico.
2. METODOLOGIA
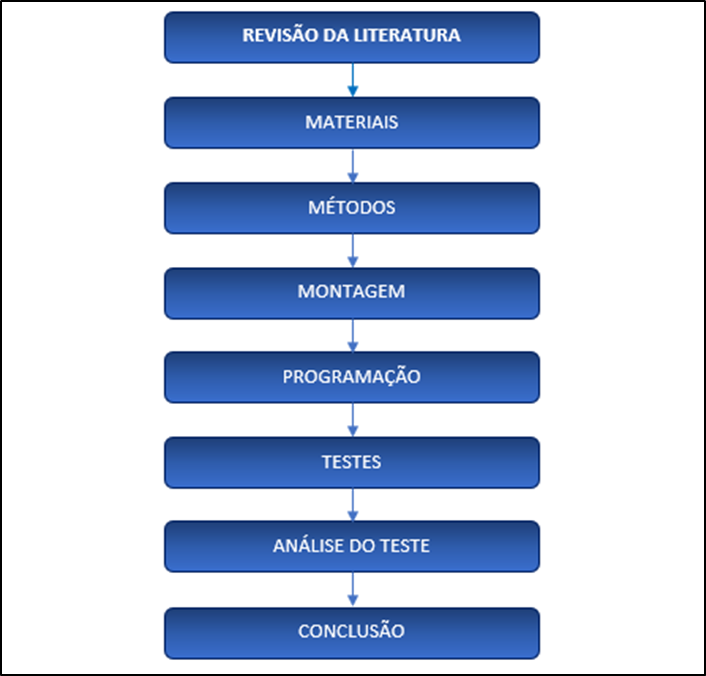
O objetivo desse artigo é montar um braço robótico, controlado por potenciômetro, permitindo a movimentação das partes articuladas, para que ilumine a área desejada. E este projeto tem três partes, que são a mecânica, eletrônica e a programação. Então no trabalho fala sobre o Arduíno e dos periféricos. E em seguida a montagem do protótipo, a criação da programação do Arduíno, e no final mostrando os testes de acordo com foi programado.
Figura 1 – Fluxograma
2.1 Revisão da literatura
2.1.1 Arduíno
O Arduíno é uma plataforma de prototipagem, que tem hardware e software. Que por volta de 2005 foi criado por um professor na Itália que queria ensinar aos seus alunos a linguagem de programação e eletrônica, este professor se chama Massimo Banzi.
Nos dias de hoje é muito utilizado para projetos acadêmicos, também muito usado como um passatempo, pois tem muitas vantagens em utilizá-lo, como por exemplo o baixo custo, pode ser utilizado em várias plataformas de computador como o Windows, Linux entre outros, possui uma linguagem de fácil entendimento e programação, também é um software livre.
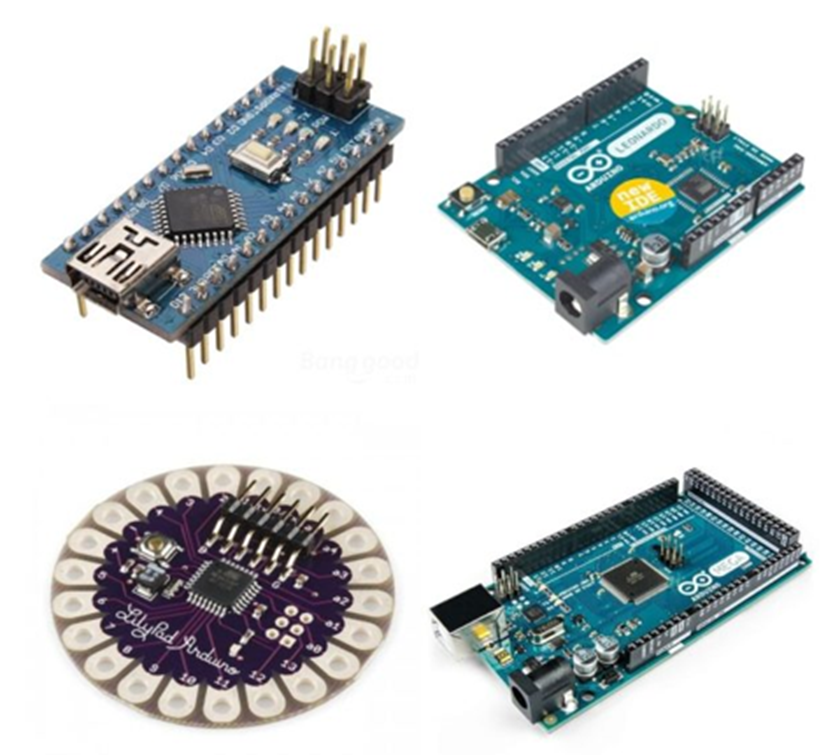
Tem uma vasta opção de modelo de Arduíno, alguns deles são: Arduíno Nano, Arduíno UNO, Arduíno Lilypad, Arduíno MEGA.
Figura 2 – Arduíno Nano, Leonardo, Lilypad e MEGA.
Fonte: blog.smartkits.com.br
2.1.2 Arduíno IDE
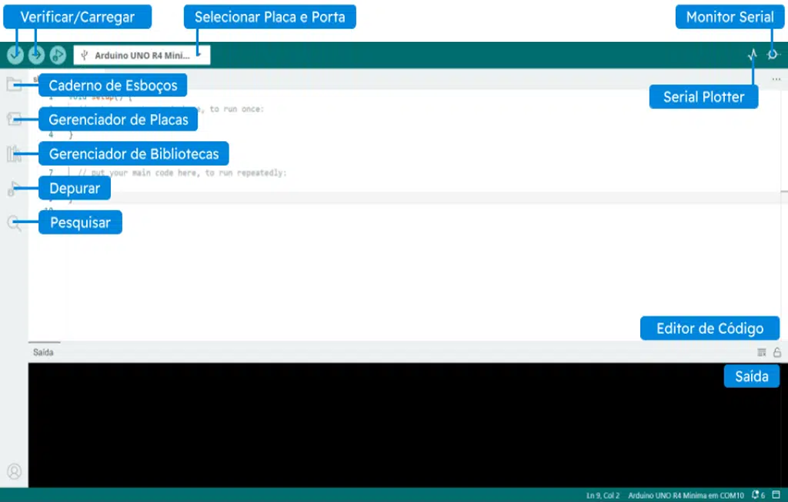
O software de computador Arduíno IDE (ambiente de desenvolvimento integrado) é um programa que consiste em ligar o software ao hardware, através de um editor de código-fonte. O Arduíno IDE que tem como objetivo programar o microcontrolador Arduíno, é adquirido facilmente no site do Arduíno. A linguagem de programação utilizada pelo Arduíno IDE é o C/C++. Usando o Arduíno IDE podemos montar um compilado de texto, que vai ser transformado em um código binário, que será enviado para a memória flash da placa Arduíno, e este código vai ser o responsável de cumprir alguma tarefa através do que tiver conectado na placa Arduíno, como por exemplo um sensor ou atuador.
Figura SEQ Figura * ARABIC 3 – Arduíno IDE
Fonte: www.makerhero.com
2.1.3 Micro servomotor
O servomotor é um dispositivo que se movimenta com precisão, de acordo com o ângulo determinado. O servomotor sg90 tem a capacidade de movimento de ângulo de 0⁰ a 180⁰ em 0,1 segundo. Com a alimentação de 5V o torque do servomotor é de 1,8kg.cm. Este servomotor é o mais leve, possuindo a massa de 9g, por conta da sua leveza, os projetos consequentemente tendo um melhor desempenho na movimentação.
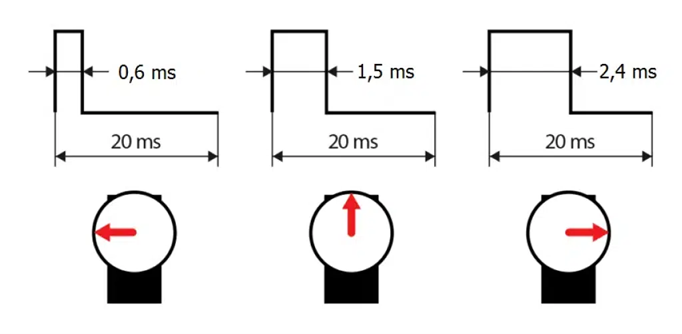
Para controlar os servos motores são comumente usados os sinais PWM, o pulso enviado ao servomotor é o que defini seu posicionamento. Normalmente para colocar em 0 graus, o micro servomotor, é preciso de um pulso de 0,6 ms, para colocar em 90 graus é preciso um pulso de 1,5 ms e para colocar em 180 graus, um pulso de 2,4 ms.
Figura 4 – posicionamento do servomotor
Fonte: www.makerhero.com
Um servomotor possui 3 entradas com fios de diferentes cores, a alimentação é de cor vermelha, o GND é o é o fio preto e o fio de transmissão do sinal PWM, que é fio da cor laranja, mas em alguns casos pode ser da cor branca. O sistema interno funciona como uma malha fechada, começando com o sinal PWM que chega pelo fio laranja (ou branco), este pulso é transformado em uma tensão, e o eixo do servo é direcionado e de acordo com a tensão, se por algum motivo a posição não estiver correta, o erro é verificado e o potenciômetro informa o posicionamento correto do eixo.
Figura 5 – esquema do servomotor
blog.smartkits.com.br
2.1.4 Protoboard
Protoboard é uma placa de ensaio, muito utilizado na construção de projetos e protótipos, essa placa possui furos com conexões internas. Com as conexões é possível conectar e desconectar os circuitos com facilidade somente com encaixe, a placa serve para facilitar os circuitos mais complexos ou somente para fazer testes rápidos, e não tem a necessidade de soldar.
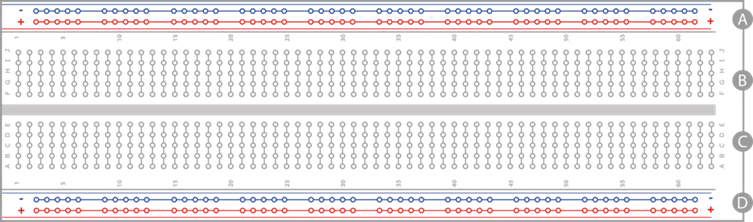
Figura 6 – Esquema da protoboard
Fonte: www.makerhero.com
O protoboard foi criado quando alguns engenheiros juntaram em uma placa de madeira, parafusos ou pregos com arames criando assim circuitos experimentais. Foi por volta das décadas de 1920 e 1930 que surgiram os protoboard.
Os componentes PTH (Through-Hole), são os componentes que são compatíveis com o protoboard, alguns dos componentes PTH são os transistores, capacitores, LEDs, diodos, conectores e vários outros componentes.
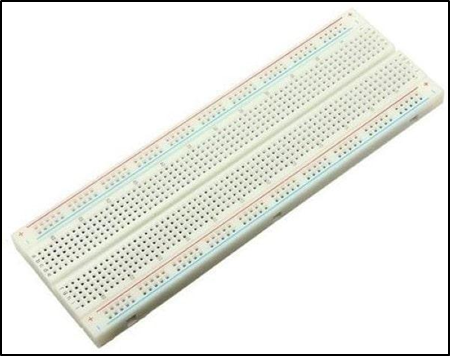
Figura 7 – Protoboard
Fonte: internet
2.1.5 Potenciômetro
O potenciômetro é um resistor ajustável e tem a função de controlar a resistência elétrica do circuito, com um botão que gira em torno do eixo que se junta com um cursor, fazendo contato com o resistor, e dependendo de onde o cursor estiver a resistência é maior ou menor. Potenciômetro é muito usado para variar o brilho da iluminação, para mudar o volume de áudio, aumento e diminuição de temperatura, entre outras coisas.
Figura 8 – potenciômetro
Fonte: www.mamuteeletronica.com.br

Os primeiros testes com resistores ajustáveis foram por volta do século XIX. Neste período, estavam procurando jeitos de conseguir ajustar a intensidade da corrente elétrica, e a tensão em um circuito. Com essa procura acabou que o potenciômetro foi desenvolvido, antes dos potenciômetros eram dispositivos mecânicos.
Figura 9 – esquema potenciômetro
Fonte: blog.smartkits.com.br
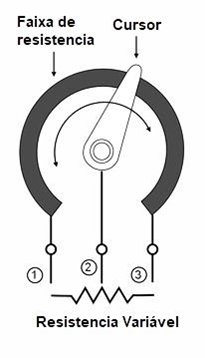
O físico alemão Johann Poggendorff, que foi o responsável pela invenção do potenciômetro, o dispositivo desenvolvido pelo físico, no século XIX, tinha fio ao redor de cilindro junto com um cursor, a resistência muda de acordo com o movimento do cursor.
3. RESULTADOS
Pretendendo mostrar todas as etapas de criação do protótipo, da ideia até a execução do projeto, que tem como objetivo controlar um braço robótico de dois eixos e assim podendo direcionar a iluminação ao ponto desejado, com isso tendo uma nova finalidade para um braço robótico.
3.1 Materiais
NOME ILUSTRATIVO DESCRIÇÃO QUANT. PREÇO (UNI) PREÇO TOTAL Arduino Placa Arduino Uno 1 R$ 90,00 R$ 90,00 MicroServomotor Micro Servo Motor 9g SG90 TowerPro 2 R$ 19,00 R$ 38,00 Potenciômetro Potenciômetro linear 10KΩ L20 mm 2 R$ 4,50 R$ 9,00 Potenciômetro Potenciômetro linear 10KΩ L15 mm 1 R$ 3,50 R$ 3,50 Protoboard Protoboard 830 furos 1 R$ 24,00 R$ 24,00 Jumpers Kit Cabo Jumper 20 cm Macho-Fêmea, 40 unidades 1 R$ 14,50 R$ 14,50 Suporte Pilha Suporte porta 4 pilhas AA, com Plug P4 1 R$ 8,50 R$ 8,50 Botão Push Botão Push Button Chave Tátil 6x6x5 mm 3 R$ 0,25 R$ 0,75 Subtotal (R$): R$ 188,25








3.2 Métodos
O projeto foi montado com os materiais descritos, utilizando as ferramentas adequadas. Os principais componentes do projeto são o micro servomotor e o Arduíno, o alimentador dos componentes é uma fonte CC, a ligação dos deles é feita através de um sistema de fios (jumpers).
As sequências dos códigos de comandos foram construídas pelo software Arduíno IDE, a linguagem da programação do Arduíno IDE é C/C++. Com os comandos podemos controlar a direção da luz, de forma pré-determinada ou também poder ser controlado manualmente utilizando o potenciômetro.
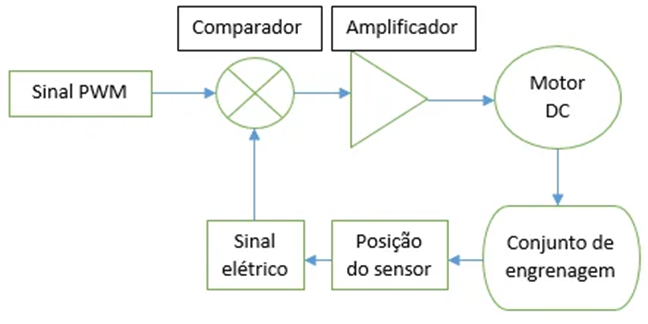
O projeto é em malha aberta, a figura abaixo mostra como é o esquema de controle do farol de busca.
Figura 10 – Esquema de controle
Fonte: Adaptado da internet

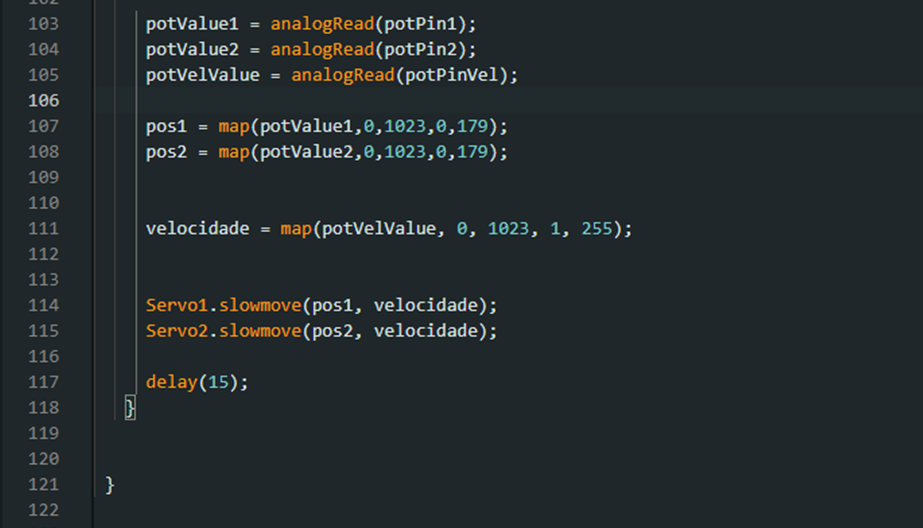
3.3 Programação
Figura 11 Código
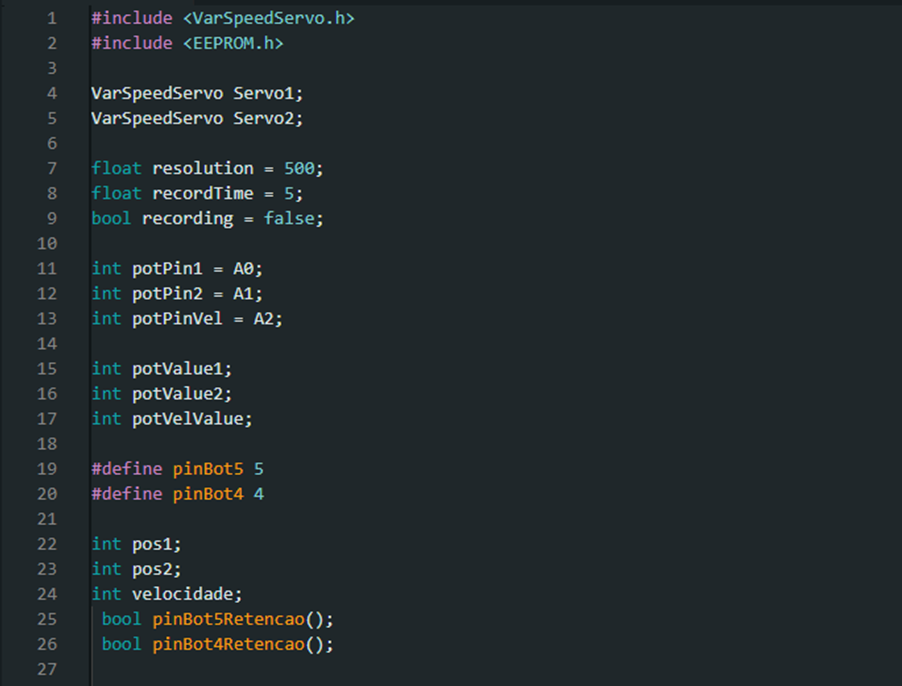
Figura 12 Código
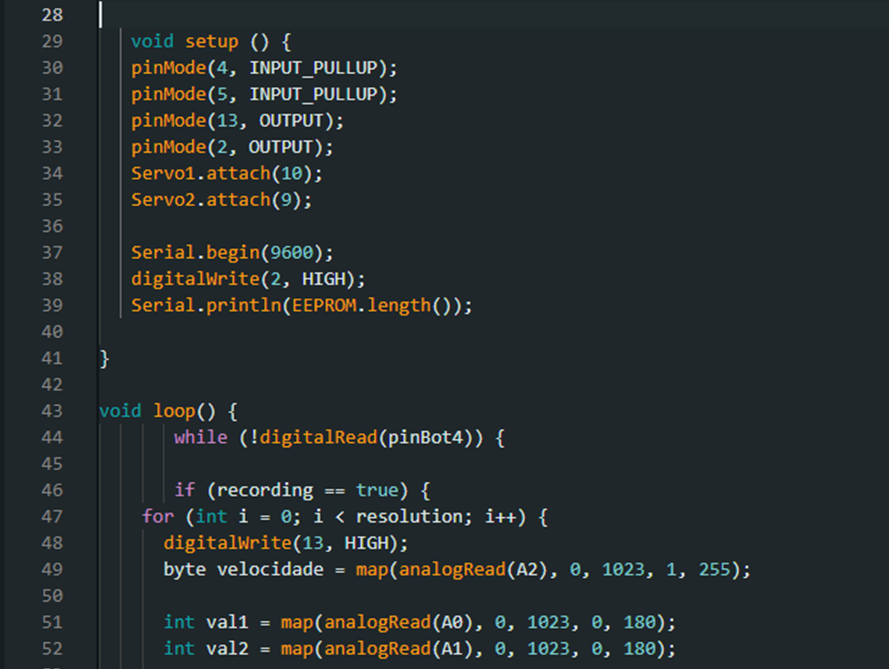
Figura 13 Código
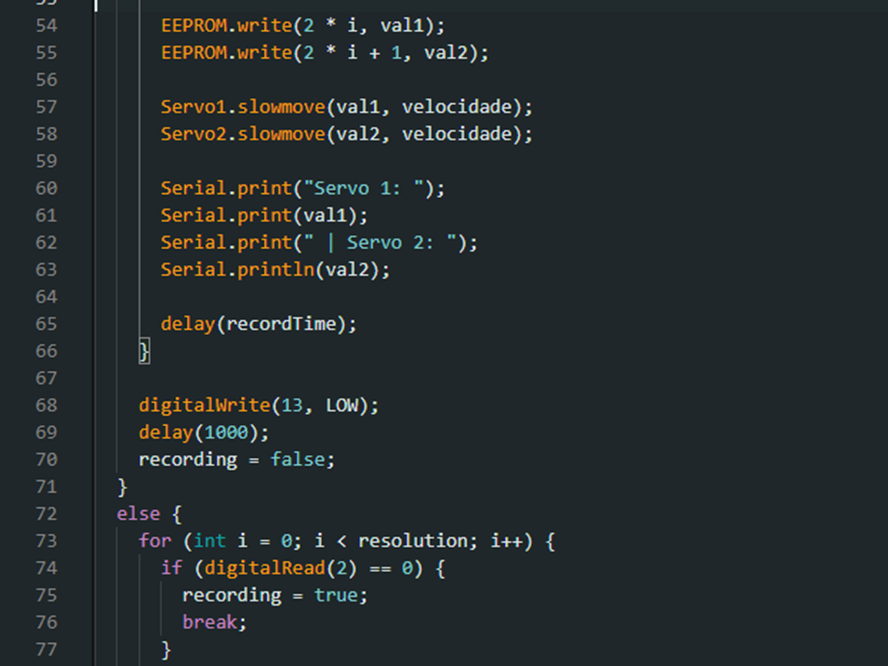
Figura 14 Código
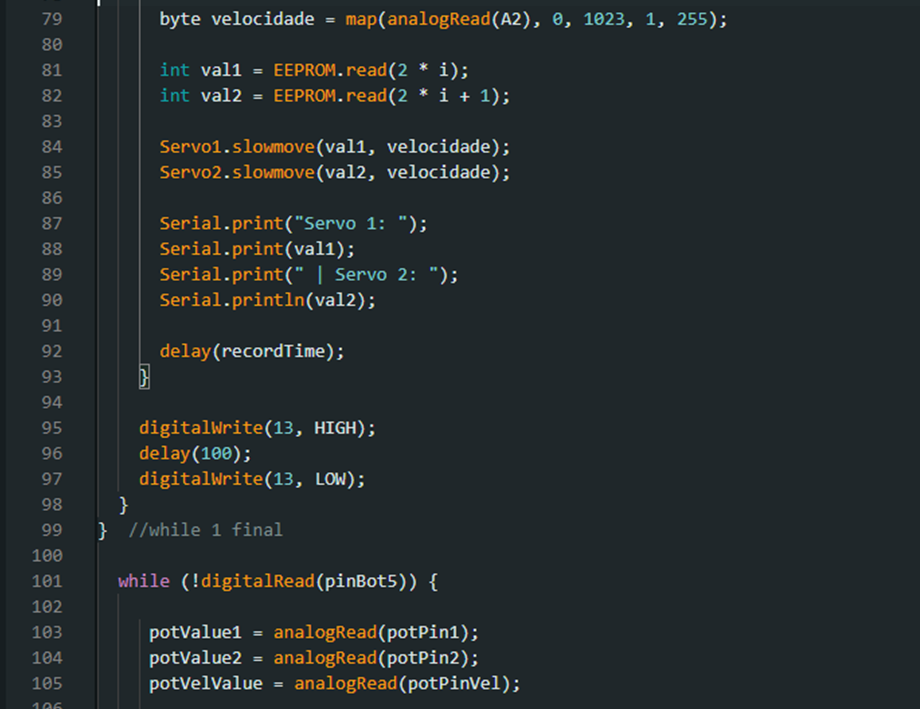
Figura 15 Código
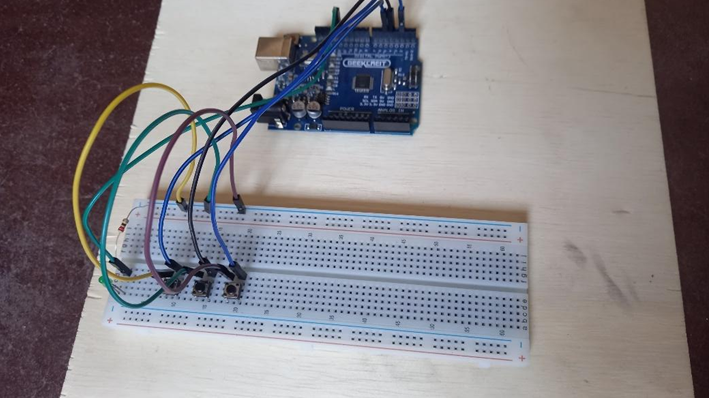
3.4 Montagem
Com todos os componentes em mãos, primeiro foi feita a ligação com os jumpers entre os botões e o Arduíno, e também a ligação do led.
Figura SEQ Figura * ARABIC 16 Montagem
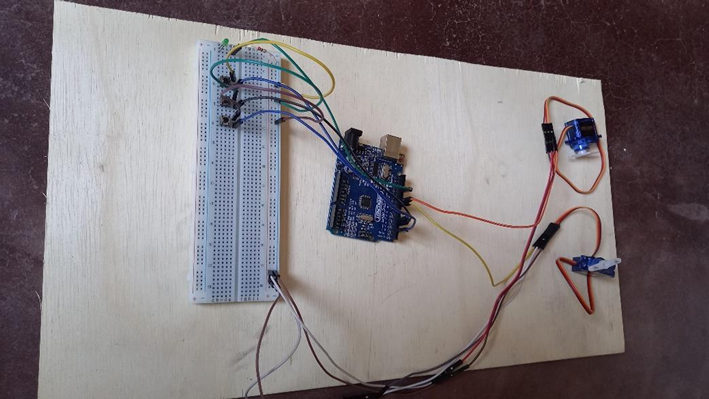
Agora a ligação é entre a placa Arduino e o micro servomotor. Ligando o micro servomotor através do próprio cabo e de jumpers, o fio do positivo e do negativo foi ligado na protoboard, de onde está ligado a fonte externa, e o fio de sinal dos servomotores foi ligado no Arduino.
Figura SEQ Figura * ARABIC 17 Montagem
A ligação do controle do protótipo usando o potenciômetro, ligando o positivo e o negativo do potenciômetro na protoboard e o fio do sinal foi ligado nas portas do Arduino.
Figura SEQ Figura * ARABIC 18 Montagem
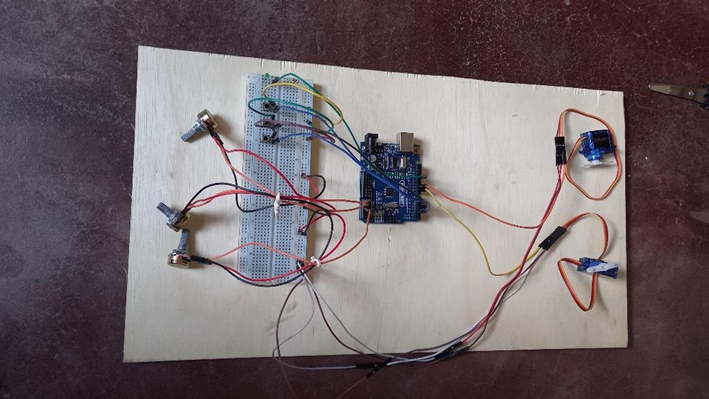
Neste protótipo temos a fontes de alimentação externa, uma das fontes de 6V (suporte de 4 pilhas AA com plug P4) foi ligada diretamente no Arduíno.
Figura SEQ Figura * ARABIC 19 Montagem

3.5 Teste
Foram realizados muitos testes, assim o protótipo foi testado em várias de velocidade, que constatou que ao em alguns momentos ao mover o potenciômetro extremamente rápido, resultou em falhas na movimentação do servomotor. Foi testado também a precisão, o projeto foi submetido a acertar a luz em vários alvos diferentes, e foi concluído que no teste de precisão o protótipo tem uma boa capacidade de precisão.
3.6 Análise do teste
O projeto apresentou falhas nos códigos, esses erros foram corrigidos. E teve problemas na estrutura do braço, como por exemplo a base ficou torta com o peso do braço, assim tendo que fazer mudanças, para deixar a base firme, evitando que fique balançando e entortando.
Após vários testes e ajustes no código, junto com a montagem, foi notado que o controle do movimento melhorou muito. O braço que controla o movimento do farol começou a responder muito bem, desta forma, os objetivos foram alcançados. Os ajustes no controle possibilitaram uma melhora significativa no desempenho no movimento do farol.
Conclusão:
Com o projeto concluído mostrou-se que o controle dos movimentos dos servomotores é eficiente e preciso, para um projeto acadêmico, é conclusivo que o Micro Servomotor SG90 alcançou as expectativas, e com isso podemos dizer um produto de grande funcionalidade que pode ser usado em diversos tipos de projetos, mas devemos ter consciência dos limites dos todos os componentes, como por exemplo quando os servomotores são controlados por potenciômetro, dependendo da rapidez dos movimentos, pode ocorre falhas nos movimentos do servomotor.
Com esses resultados, o projeto realizou o objetivo de criar um sistema de movimento de dois eixos que seja eficiente e de baixo custo. E contém a possibilidade de melhorias no projeto, como por exemplo utilizar um servomotor que gire 360° graus ao invés de 180° graus, ou servomotores que possam carregar mais pesos, assim podendo ter estruturas mais robustas.
Referência bibliográfica:
Gabriel Martins de Freitas; esquema do potenciômetro. https://blog.smartkits.com.br/como-funciona-o-potenciometro-com-chave/.
Pedro Ney Stroski; fluxograma do servo motor. https://www.electricalelibrary.com/2017/07/19/como-servomotores-funcionam/, 2017.
LAMB,F. Automação Industrial na Prática.Porto Alegre:Ed.AMGH,2015.
BANZI,M;SHILOH,M.PrimeirospassoscomoArduino–aplataformadeprototipagemeletrônica opensource 2º Edição.São Paulo:Ed.Novatec,2015.
MCROBERTS, Michael. Arduino básico / Michael McRoberts; [tradução Rafael Zanolli]. São Paulo: NOVATEC EDITORA, 2011.
ROSÁRIO, João Mauricio. Robótica industrial I: Modelagem, utilização e programação. São Paulo: BARAÚNA, 2010.
LAMB,F. Automação Industrial na Prática.Porto Alegre:Ed.AMGH,2015.
Herminia, Carla. Modelos e tipos de Arduino. https://blog.smartkits.com.br/tipos-de-arduino/
Componentes da tabela. https://www.smartprojectsbrasil.com.br/
Foto da protoboard de 830 pontos. https://www.makerhero.com/produto/protoboard-830-pontos/