REGISTRO DOI: 10.69849/revistaft/th102410231557
Manuella Reis de Almeida Holovaty¹
Lisandra Rodrigues Risi²
Ricardo de Oliveira Meneses³
Gisele Cabral Benjamim4
RESUMO
Introdução: Cirurgia robótica caracteriza-se como uma grande conquista da cirurgia minimamente invasiva, enfermeiro(a) que atua em cirurgia robótica precisa conhecer as especificidades de cada cliente, a posição cirúrgica ao qual o paciente será submetido e os fatores de risco intrínsecos e extrínsecos que o acomete no posicionamento para que a sua avaliação intraoperatória Objetivo: Identificar os principais fatores de risco para lesão por posicionamento de trendelenburg severo em cirurgias urológicas por robótica. Metodologia: Trata-se de um estudo metodológico estruturado em duas etapas: (1) Revisão integrativa da literatura, para busca dos fatores de risco que acometem pacientes no posicionamento de trendelenburg severo em cirurgias urológicas por via robótica pautada no método PRISMA e utilizando a estratégia PICo, nas bases de dados PubMed (Search resource provided by the National Center for Biotechnology Information) e BVS (Biblioteca Virtual em Saúde). (2) Categorização dos fatores de risco intrínsecos e extrínsecos Resultados: A busca inicial resultou em 4.238 artigos e após a aplicação dos critérios de elegibilidade, 04 artigos foram incluídos no estudo. Dentre os artigos incluídos, foram identificados 12 fatores de risco distribuídos que foram tabelados de acordo com suas especificações. Conclusão: A cirurgia robótica se tornou um sistema inovador na categoria de cirurgias minimamente invasivas, o posicionamento cirúrgico para esta modalidade tem suas especificidades e o enfermeiro atuante em sala operatória possui papel fundamental para segurança do paciente. Contudo, o baixo quantitativo de literatura identificado no presente estudo reforça a relevância da construção de artigos acerca desta temática.
Descritores: Procedimentos cirúrgicos robóticos; Decúbito inclinado com rebaixamento de cabeça; Fatores de risco; Segurança do paciente; Enfermagem de Centro Cirúrgico.
ABSTRACT
Introduction: Robotic surgery is characterized as a great achievement of minimally invasive surgery, nurses who work in robotic surgery need to know the specificities of each client, the surgical position to which the patient will be subjected and the intrinsic and extrinsic risk factors that affects the positioning so that its intraoperative evaluation Objective: To identify the main risk factors for injury due to severe Trendelenburg positioning in robotic urological surgeries. Methodology: This is a methodological study structured in two stages: (1) Integrative review of the literature, to search for risk factors that affect patients in severe trendelenburg positioning in robotic urological surgeries based on the PRISMA method and using the strategy PICo, in the PubMed (Search resource provided by the National Center for Biotechnology Information) and VHL (Virtual Health Library) databases. (2) Categorization of intrinsic and extrinsic risk factors Results: The initial search resulted in 4,238 articles and after applying the eligibility criteria, 04 articles were included in the study. Among the articles included, 12 distributed risk factors were identified and tabulated according to their specifications. Conclusion: Robotic surgery has become an innovative system in the category of minimally invasive surgeries, surgical positioning for this modality has its specificities and the nurse working in the operating room plays a fundamental role in patient safety. However, the low quantity of literature identified in the present study reinforces the relevance of creating articles on this topic.
Key words: Robotic surgical procedures; Inclined decubitus with head lowering; Risk factors; Patient safety; Surgical Center Nursing.
RESUMEN
Introducción: La cirugía robótica se caracteriza por ser un gran logro de la cirugía mínimamente invasiva, las enfermeras que trabajan en cirugía robótica necesitan conocer las especificidades de cada cliente, la posición quirúrgica a la que será sometido el paciente y los factores de riesgo intrínsecos y extrínsecos que afecta la posicionamiento para su evaluación intraoperatoria Objetivo: Identificar los principales factores de riesgo de lesión por posicionamiento de Trendelenburg severo en cirugías urológicas robóticas. Metodología: Este es un estudio metodológico estructurado en dos etapas: (1) Revisión integrativa de la literatura, para buscar factores de riesgo que afectan a pacientes en posición de Trendelenburg grave en cirugías urológicas robóticas basadas en el método PRISMA y utilizando la estrategia PICo, en el Bases de datos PubMed (recurso de búsqueda proporcionado por el Centro Nacional de Información Biotecnológica) y VHL (Biblioteca Virtual en Salud). (2) Categorización de factores de riesgo intrínsecos y extrínsecos Resultados: La búsqueda inicial resultó en 4.238 artículos y después de aplicar los criterios de elegibilidad, se incluyeron en el estudio 04 artículos. Entre los artículos incluidos, se identificaron y tabularon 12 factores de riesgo distribuidos según sus especificaciones. Conclusión: La cirugía robótica se ha convertido en un sistema innovador en la categoría de cirugías mínimamente invasivas, el posicionamiento quirúrgico para esta modalidad tiene sus especificidades y el enfermero que trabaja en el quirófano juega un papel fundamental en la seguridad del paciente. Sin embargo, la baja cantidad de literatura identificada en el presente estudio refuerza la relevancia de crear artículos sobre este tema.
Descriptores: Procedimientos quirúrgicos robóticos; Decúbito inclinado con la cabeza bajada; Factores de riesgo; Seguridad del paciente; Enfermería del Centro Quirúrgico.
- INTRODUÇÃO
Cirurgia robótica caracteriza-se como uma grande conquista da cirurgia minimamente invasiva, agregando importantes avanços tecnológicos à sala de operações (SILVA et. al., 2019). No Brasil, essa modalidade cirúrgica foi implementada em 2008 e seu conceito vem ao encontro das propostas atuais de cirurgia (SANT’ANNA et al., 2004).
É um procedimento que segue a mesma conduta da cirurgia laparoscópica, porém uma das diferenças entre essas modalidades é que, na laparoscopia, as pinças são manuseadas pelas mãos do cirurgião. Na robótica, os movimentos são pelos braços do robô comandados por um cirurgião à distância, sentado em um console com os dedos postos em um dispositivo que aciona e envia os movimentos em tempo real para o robô (MADUREIRA FILHO, 2015).
Esse estilo cirúrgico já é realizado em diversas clínicas como: cardíaca, cabeça e pescoço, tórax, geral, urologia e ginecologia. Tal modelo inovador busca realizar os procedimentos com mínimo trauma operatório e uma rápida recuperação pós cirúrgica, desencadeando em menor morbidade e com reflexo direto no bem-estar dos pacientes no pós-operatório (PINTO et al., 2018).
Dentre as vantagens que contemplam a cirurgia robótica, pode-se destacar: realização de procedimentos complexos de modo simples e prático; redução na agressão aos órgãos e sistemas; menor tempo de internação; diminuição de complicações; menor perda sanguínea; redução da dor em pós-operatório; melhores resultados estéticos; e menor tempo para volta das atividades diárias (SANT’ANNA et al., 2004; INCA, 2012; MENESES, 2021).
A cirurgia robótica traz uma série de benefícios não só para equipe multiprofissional mais para o paciente que é submetido a essa especificidade cirúrgica. Essa modalidade acarreta um preparo pré-cirúrgico, desde o planejamento do sistema robótico, o drape (montagem) do robô, provisão dos insumos, até o posicionamento seguro do paciente, sendo esta uma das etapas mais complexas. Desse modo, estima-se pela alta qualidade da equipe de enfermagem ligadamente com a presença do enfermeiro em sala (FERREIRA et al., 2019).
Para iniciar um programa de cirurgia robótica, funcionários bem treinados são de grande relevância, e para esta finalidade, o enfermeiro tem como atribuição a formação e atualização de sua equipe. O profissional de enfermagem deve assegurar um suporte eficaz tanto à equipe quanto ao cliente. Para garantir a segurança do paciente durante o período intraoperatório, deve-se estar atento ao posicionamento cirúrgico, e a imobilização do paciente (SOUZA, 2021; FERREIRA et al., 2019).
O posicionamento cirúrgico deve manter o corpo do paciente com o mínimo de tensão e pressão sobre o tecido, preservando as funções ventilatória e circulatória e prevenindo exposição indevida, além de permitir ao cirurgião um bom acesso ao sítio cirúrgico e, ao anestesista, acesso às linhas de infusão e monitorização. As equipes de anestesista, cirurgia e enfermagem devem se envolver nesse processo, que se inicia logo após a indução anestésica proporcionando um posicionamento seguro e confortável para paciente. (TREVILATO, 2018).
Todavia, mesmo com toda segurança empregada no posicionamento cirúrgico robótico, o risco para lesões por pressão (LP) pode ocorrer. Lesões por pressão decorrentes do posicionamento são consideradas eventos adversos, provocados devido ao procedimento cirúrgico. Dependendo da posição cirúrgica, do tipo de anestesia e do tempo de procedimento, o paciente poderá ter o risco ampliado de lesões por posicionamento e somam-se a isso a idade, as comorbidades e demais fatores de risco (TREVILATO et al., 2018).
Nesse contexto, uma forma de análise de risco para lesão em decorrência do posicionamento operatório é a Escala de Avaliação de Risco para o Desenvolvimento de Lesões Decorrentes do Posicionamento Cirúrgico (ELPO), validada no Brasil, cujo escore varia de 7 a 35 pontos: quanto maior o escore, maior o risco de o paciente desenvolver lesões decorrentes do posicionamento (PEIXOTO et al., 2019). Em contrapartida, há uma baixa gama de estudos na literatura que abordem fatores de risco específicos para o posicionamento cirúrgico robótico.
O enfermeiro(a) que atua em cirurgia robótica precisa conhecer as especificidades de cada cliente, a posição cirúrgica ao qual o paciente será submetido e os fatores de risco intrínsecos e extrínsecos que o acomete no posicionamento para que a sua avaliação intraoperatória, de acordo com a Sistematização da Assistência de Enfermagem Perioperatória (SAEP), seja essencial para o planejamento dos cuidados de enfermagem baseados em evidências cientificas sua implementação na sala de cirurgia com previsão e provisão de meios para proteção e segurança do paciente (TREVILATO et al., 2022; FLAUZINO et al., 2021).
Como questão norteadora deste estudo tem-se: Quais são os principais fatores de risco que o enfermeiro de cirurgia robótica precisa acompanhar para prevenir/reduzir a lesão por posicionamento de trendelenburg severo em cirurgias urológicas por robótica?
O que vem a corroborar com o objetivo geral de levantar na literatura os principais fatores de risco para lesão por posicionamento de trendelenburg severo em cirurgias urológicas por robótica. E como objetivos específicos: identificar fatores de risco para lesão por posicionamento de trendelenburg severo em cirurgias urológicas por via robótica e mapear os fatores de risco intrínsecos e extrínsecos.
Este artigo se justifica que o posicionamento operatório em cirurgias robóticas é um momento crítico para equipe multiprofissional devido diversos fatores como: Anestesia, histórico do paciente, posições complexas. Com isso, o levantamento desta temática poderá auxiliar o enfermeiro(a) na tomada de decisão quanto a segurança do paciente no momento do posicionamento cirúrgico robótico, refletindo numa melhor assistência de enfermagem e recuperação do paciente.
Trazendo como relevância que para se fazer uma busca primária sobre o tema, notou-se uma reduzida quantidade de estudos que abordem fatores de risco para desenvolvimento de lesão por posicionamento do paciente em cirúrgica robótica. Devido a isto, faz-se necessário a busca na literatura e mapeamento de tais fatores. O levantamento desta temática poderá auxiliar o enfermeiro(a) na tomada de decisão quanto a segurança do paciente no momento do posicionamento cirúrgico robótico, refletindo numa melhor assistência de enfermagem e recuperação do paciente.
2. REVISÃO DE LITERATURA
2.1 CIRURGIA ROBÓTICA
A primeira plataforma robô utilizada em humanos foi empregada em 1985 para realizar biópsias neurocirúrgicas, denominada Programmable Universal Machine for Assembly. Ademais, a máquina foi adaptada e usada para procedimentos urológicos e de próstata comuns pelo The Robotics Center, no Imperial College (MORRELL e cols. 2020).
Em 1998 foi lançado o sistema Zeus, utilizado pela primeira vez para cirurgia de anastomose da tuba uterina (FALCONE e cols 1999), com braços e instrumentos cirúrgicos controlados pelo cirurgião, introduzindo o próprio conceito de tele presença, em que o cirurgião (mestre) comanda o servo (robô). O robô ZEUS compunha-se em três braços, cada um preso de forma independente a mesa cirúrgica (MORRELL e cols. 2020).
Em comparação com a plataforma Zeus®, em 1995 a empresa Intuitive Surgical lança no mercado um novo modelo de robô, o Da Vinci Surgical System®, em que melhorou esse modelo de cirurgia substancialmente em relação aos protótipos anteriores (MORRELL e cols. 2020; MENEZES, 2021).
No Brasil, a cirurgia robótica foi implementada em 2008. Entretanto, atualmente, ainda há poucos sistemas instalados em nosso país por conta do elevado valor de aquisição e dos insumos (PINTO e cols. 2018). É um procedimento que segue a mesma conduta da cirurgia laparoscópica, porém uma das diferenças entre essas modalidades é que, na laparoscopia, as pinças são manuseadas pelas mãos do cirurgião (MADUREIRA FILHO, 2015).
Na robótica, os movimentos são pelos braços do robô comandados por um cirurgião à distância, sentado em um console com os dedos postos em um dispositivo que aciona e envia os movimentos em tempo real para o robô (MADUREIRA FILHO, 2015).
Esse estilo cirúrgico já é realizado em diversas clínicas como: cardíaca, cabeça e pescoço, tórax, geral, urologia e ginecologia. Tal modelo inovador busca realizar os procedimentos com mínimo trauma operatório e uma rápida recuperação pós cirúrgica, desencadeando em menor morbidade e com reflexo direto no bem-estar dos pacientes no pós-operatório (PINTO et al., 2018).
Dentre as vantagens que contemplam a cirurgia robótica, pode-se destacar: realização de procedimentos complexos de modo simples e prático; redução na agressão aos órgãos e sistemas; menor tempo de internação; diminuição de complicações; menor perda sanguínea; redução da dor em pós-operatório; melhores resultados estéticos; e menor tempo para volta das atividades diárias (SANT’ANNA et al., 2004; INCA, 2012; MENESES, 2021).
2.2 LESÃO POR POSICIONAMENTO CIRÚRGICO
Ao submeter-se a um procedimento cirúrgico, o paciente é exposto a numerosas situações que poderão comprometer sua integridade física e psicoemocional durante o período perioperatório (ANGELO e cols. 2018). Entre tais situações, podemos destacar o posicionamento cirúrgico que deve garantir ao paciente conforto, segurança e respeito aos seus limites anatômicos e fisiológicos (CARNEIRO e cols. 2011).
O posicionamento cirúrgico deve manter o corpo do paciente com o mínimo de tensão e pressão sobre o tecido, preservando as funções ventilatória e circulatória e prevenindo exposição indevida, além de permitir ao cirurgião um bom acesso ao sítio cirúrgico e, ao anestesista, acesso às linhas de infusão e monitorização. As equipes de anestesista, cirurgia e enfermagem devem se envolver nesse processo, que se inicia logo após a indução anestésica proporcionando um posicionamento seguro e confortável para paciente (TREVILATO, 2018).
Pacientes em sala de cirurgia estão suscetíveis a inúmeros riscos e ao desenvolvimento de várias complicações por agentes químicos, elétricos e físico como a lesão por pressão, sendo esta a mais comumente encontrada (SPRUCE e cols. 2017).
A lesão por pressão pode ser caracterizada como uma lesão no tecido ou estrutura subjacente, sendo mais evidente em proeminências ósseas, ocasionada por pressão isolada ou combinada à fricção e/ou a cisalhamento durante a transferência para o leito, podendo estar associada às comorbidades significativas do paciente (ANGELO e cols. 2018).
Lesões por pressão decorrentes do posicionamento são consideradas eventos adversos, provocados devido ao procedimento cirúrgico. Dependendo da posição cirúrgica, do tipo de anestesia e do tempo de procedimento, o paciente poderá ter o risco ampliado de lesões por posicionamento e somam-se a isso a idade, as comorbidades e demais fatores de risco (TREVILATO et al., 2018).
2.3 ENFERMAGEM E SEGURANÇA DO PACIENTE NO POSICIONAMENTO CIRÚRGICO
A segurança do paciente é substancial para garantir o atendimento em todas as instituições de saúde. No campo da saúde o aprimoramento dos aspectos técnicos e científicos para gerar um aumento na quantidade e variedade de procedimentos cirúrgicos vem crescendo, os quais podem prejudicar a segurança do paciente e impactar negativamente na recuperação durante o período pós-operatório (FLAUZINO et al., 2021).
Uma das preparações que antecedem o ato cirúrgico é gera preocupações na equipe de enfermagem se refere ao posicionamento do paciente em mesa operatória. Os agravos ocasionados pelo posicionamento anestésico-cirúrgico inadequado representam uma das maiores implicações à saúde do paciente e é um problema relevante de saúde pública (GUIDO et al., 2014).
O posicionamento do paciente no período anestésico-cirúrgico constitui responsabilidade de toda a equipe presente na sala de operação, sendo uma variável de acordo com o procedimento planejado (OLIVEIRA et al., 2019). Essa etapa do intraoperatório tem como objetivos a visualização cirúrgica adequada e, se realizada com técnicas e equipamentos corretos (SPRICE et al., 2014), propõe a garantia da dignidade do paciente ao evitar exposições indevidas e estabelecimento e manutenção de via aérea, acesso(s) venoso(s), dispositivos e equipamentos de monitorização, além de promover adequadas perfusão e circulação, protegendo músculos, nervos e proeminências ósseas (SORENSEN et al., 2015).
Porém, mesmo com toda segurança empregada no posicionamento cirúrgico, o risco para lesões por pressão (LP) pode ocorrer. Lesões por pressão decorrentes do posicionamento são consideradas eventos adversos, provocados devido ao procedimento cirúrgico. Dependendo da posição cirúrgica, do tipo de anestesia e do tempo de procedimento, o paciente poderá ter o risco ampliado de lesões por posicionamento e somam-se a isso a idade, as comorbidades e demais fatores de risco (TREVILATO et al., 2018).
Nesse contexto, uma forma de análise de risco para lesão em decorrência do posicionamento operatório é a Escala de Avaliação de Risco para o Desenvolvimento de Lesões Decorrentes do Posicionamento Cirúrgico (ELPO), validada no Brasil, cujo escore varia de 7 a 35 pontos: quanto maior o escore, maior o risco de o paciente desenvolver lesões decorrentes do posicionamento (PEIXOTO et al., 2019).
Além da escala ELPO, uma segunda barreira para evitar tal evento adverso e contribui para segurança do paciente operatório é o checklist Cirurgias Seguras Salvam Vidas, criado pela Organização Mundial da Saúde e tem como objetivo padrões de segurança que possam ser aplicados em diversos países. Esta oferta uma lista de verificação como protocolo universal, reconhecida como medida eficiente para redução dos riscos cirúrgicos e pode ser realizada pelos membros da sala de operação, sejam tanto da equipe de enfermagem, cirúrgica ou anestésica (TREVILATO et al., 2018).
O enfermeiro(a) que atua em cirurgia robótica precisa conhecer as especificidades de cada cliente, a posição cirúrgica ao qual o paciente será submetido e os fatores de risco intrínsecos e extrínsecos que o acomete no posicionamento para que a sua avaliação intraoperatória, de acordo com a Sistematização da Assistência de Enfermagem Perioperatória (SAEP), seja essencial para o planejamento dos cuidados de enfermagem baseados em evidências cientificas sua implementação na sala de cirurgia com previsão e provisão de meios para proteção e segurança do paciente (TREVILATO et al., 2022; FLAUZINO et al., 2021).
3. METODOLOGIA
O presente estudo metodológico foi estruturado de acordo com as melhores evidências científicas e desenvolvido em duas etapas:
3.1 ETAPA 1: REVISÃO INTEGRATIVA DA LITERATURA
A primeira etapa deste estudo consiste em uma revisão integrativa da literatura para identificação dos principais fatores de risco para lesão por posicionamento de trendelenburg severo em pacientes submetidos à cirurgia urológica por via robótica. Neste projeto de pesquisa foi utilizado como base o método PRISMA.
A recomendação do Preferred Reporting Itemsfor Systematic Reviews and MetaAnalyses – PRISMA, que consiste em um checklist com 27 principais itens com objetivo de auxiliar e nortear os autores para melhora da organização textual de revisões sistemáticas e meta análises. Todavia, alguns itens do checklist não foram necessários devido à natureza da pesquisa (GALVÃO; PANSANI; HARRAD, 2015).
3.1.1 Critério de elegibilidade
Serão incluídos artigos que respondam à pergunta de pesquisa “Quais são os principais fatores de risco que o enfermeiro de cirurgia robótica precisa acompanhar para prevenir/reduzir a lesão por posicionamento de trendelenburg severo em cirurgias urológicas por robótica?” disponíveis nas bases de dados.
Para realizar a seleção dos artigos foi utilizada a estratégia PICo. Segundo Santos e cols (2007, p. 508) as Práticas Baseadas em Evidências indicam que os problemas clínicos que se mostram na prática assistencial, de ensino ou pesquisa, sejam divididos, a seguir organizados e utilizando-se a estratégia PICo. PICo representa um acrônimo para Paciente, Intervenção, Contexto, e pode ser utilizada para elaborar questões de pesquisas de naturezas diversas. A pergunta de pesquisa bem construída possibilita a definição correta de que informações (evidências) são substanciais para resolução da questão clínica da pesquisa, potencializa a recuperação de evidências nas bases de dados, foca o escopo da pesquisa e evita a realização de buscas desnecessárias.
Dessa forma a estratégia foi moldada a este projeto de pesquisa sendo classificada como: “P” pacientes submetidos a cirurgias urológicas por via robótica; “I” corresponde aos cuidados de enfermagem; “Co” corresponde ao Risco de lesão por posicionamento de trendelenburg severo conforme apresentado no quadro 1.
Quadro 01. Estratégia de busca e estratégia PICo, Rio de Janeiro-RJ/Brasil, 2022
ACRÔNIMO MeSH DeCS P (and) Robotic Surgical Procedures Procedimentos cirúrgicos robóticos I (and) Operating Room Nursing Enfermagem de Centro Cirúrgico Co (and) Head–Down Tilt Risk Factors Patient Safety Decúbito inclinado com rebaixamento da cabeça Fatores de Risco Segurança do Paciente
Fonte: Dados gerados pelo autor, 2022.
3.1.2 Base de Dados
Serão incluídos estudos que respondam à pergunta de pesquisa “Quais são os principais fatores de risco que o enfermeiro de cirurgia robótica precisa acompanhar para prevenir a lesão por posicionamento cirúrgico robótico em cirurgias urológicas?”, disponíveis nas bases de dados PUBMED (Recurso de busca fornecido pela National Center for Biotechnology Information) e BVS (Biblioteca Virtual em Saúde) incluindo nesta segunda as bases LILACS e MEDLINE.
3.1.3 Estratégia de Busca
De acordo com as recomendações do PRISMA (Principais Itens para Relatar Revisões Sistemáticas e Meta-análises), segundo Galvão e colaboradores (2015, p. 337), é necessário a estratégia de busca completa na base de dados. Neste projeto, a estratégia realizada consistiu em uma busca completa na base BVS através do sistema “busca avançada” no site eletrônico da base de dados no primeiro semestre de 2023.
A primeira busca ocorreu com a mesclagem, na forma “Descritor de assunto”, de cinco (05) descritores em saúde da seguinte forma: <((“Procedimentos Cirúrgicos Robóticos” AND “Decúbito Inclinado com Rebaixamento da Cabeça”AND “Fatores de Risco” AND “Segurança do paciente” AND “Enfermagem de Centro Cirúrgico”))>, utilizando o acrônimo “AND” na junção dos descritores e os filtros: últimos 5 anos, assunto principal: pele, fatores de risco, idoso e cuidados de enfermagem.
A segunda busca foi realizada com a mesclagem dos três (03) primeiros descritores principais e após incluindo o quarto e quinto de forma independente como apresentado em:<((“Procedimentos cirúrgicos robóticos”AND“Decúbito inclinado com rebaixamento de cabeça” AND “Fatores de Risco”))>; <((“ Procedimentos cirúrgicos robóticos”AND“Decúbito inclinado com rebaixamento de cabeça” AND “Fatores de Risco” AND “Segurança do paciente”))>; <((“ Procedimentos cirúrgicos robóticos”AND“Decúbito inclinado com rebaixamento de cabeça” AND “Fatores de Risco” AND “Enfermagem de Centro Cirúrgico”))>.
3.1.4 Seleção dos Estudos
Inicialmente os artigos foram analisados por um avaliador de acordo com o título, resumo e assunto, verificando se correspondem à temática do projeto de pesquisa. Aqueles que responderam à pergunta do estudo, apresentaram fatores de risco relevantes para pesquisa, abordaram pacientes adultos e idosos e estiverem na faixa temporal dos últimos 05 anos foram incluídos, os demais excluídos.
Foi necessário para inclusão ou exclusão o consenso dois avaliadores. Em um segundo momento, os textos completos foram analisados pelos dois avaliadores e nos casos de divergências foi solicitado à análise de um terceiro avaliador.
3.1.5 Coleta de dados
Os dados encontrados foram dispostos em um quadro de acordo com autor/ano/revista, objetivo, metodologia do estudo e fatores de risco para lesão no posicionamento de trendelenburg severo em cirurgias urológicas por via robótica
3.1.6 Síntese do estudo
Os dados foram categorizados em tabela de acordo com fatores de risco intrínsecos e extrínsecos para o risco de desenvolvimento de lesão por posicionamento de trendelenburg severo em cirurgias urológicas por via robótica, identificados nos artigos incluídos nesta revisão. Os artigos que abordam um mesmo tipo de fator de risco pertenceram à mesma categoria.
3.2 ETAPA 2: MAPEAR OS FATORES DE RISCO INTRÍNSECOS E EXTRÍNSECOS
A presente etapa consistiu na elaboração de uma tabela onde os fatores de risco identificados na revisão de literatura foram categorizados como intrínsecos e extrínsecos e agrupados de acordo com grau de complexidade.
4. RESULTADOS E DISCUSSÃO
4.1 ETAPA 1: REVISÃO INTEGRATIVA DA LITERATURA
A presente revisão integrativa da literatura foi realizada com base no método PRISMA, tendo como resultado de busca um total de 4.238 artigos, sendo 4.224 artigos na BVS (n=4.224) e 09 na PubMed (n= 09). 05 artigos identificados em outras fontes foram adicionados e apenas 20 artigos duplicados foram removidos (n=20). Um total de 04 artigos (n= 04) foram selecionados e incluídos como mostra o quadro x.
Quadro 02. Fluxograma de busca Preferred Reporting Items for Systematic Reviews and Meta-Analyses– PRISMA, Niterói- RJ/Brasil, 2021.
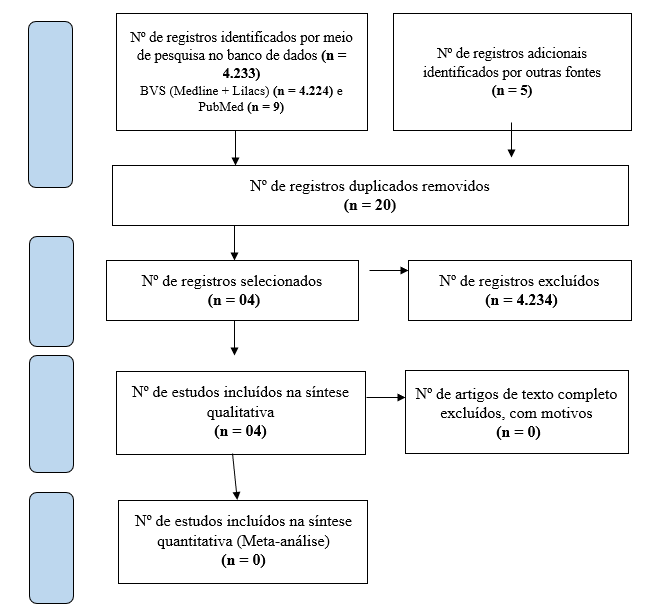
Fonte: Dados gerados pelo autor, 2023.
Quadro 03. Artigos incluídos no estudo através da revisão integrativa da literatura. Rio de Janeiro/ Brasil, 2023.
Autor Ano Revista Objetivo Método Fatores de risco Johansson, V. R; Vogelsang, A.C.V. 2019 J.Clin.Nurs.28:1708/18. Descrever os sintomas de extremidades relatados pelo paciente após cistectomia laparoscópica robótica em pacientes com câncer de bexiga. Estudo observacional prospectivo quantitativo. Os pacientes foram acompanhados com o QuickDASH (Disabilities in the Arm, Shoulder and Hand), Lower Extremity Functional Scale (LEFS) e um questionário específico do estudo. Sexo, faixa etária, Índice de Massa Corpórea, Classificação ASA, comorbidades, tempo cirúrgico e método operacional Kingo, P.S. et. al. 2017 Scandinavian Journal of Urology, vol. 51, no. 5, 381/87 Comparar o resultado clínico e a resposta inflamatória sistêmica pós-operatória para quantificar o grau de lesão tecidual na cistectomia por minilaparotomia aberta (CMO) versus cistectomia laparoscópica assistida por robô. 175 pacientes foram elegíveis para o estudo e foram submetidos a OMC (n = 125), RALC-EUD (n = 12) ou RALC-IUD (n = 38). Parâmetros clínicos e perioperatórios, incluindo dados demográficos, comorbidades, estágio do tumor e resultados pós-operatórios, foram coletados dos prontuários médicos. Tempo cirúrgico Flauzino, V.H.P. et. al. 2021 Research, Society and Development, v. 10, n. 6, e34410615358 O objetivo central do estudo foi descrever os principais cuidados de enfermagem durante o posicionamento anestésico-cirúrgico e mais especificamente, descrever os fatores de riscos para lesão no posicionamento anestésico-cirúrgico. Trata-se de uma revisão bibliográfica de abordagem descritiva e qualitativa. Doença Pulmonar Obstrutiva Crônica (DPOC), Idade, IMC, Tempo operatório, Gomes, S. K. A. João Pessoa, 2019. 60 f. Propor um protocolo de avaliação de risco para lesões decorrentes do posicionamento em idosos submetidos a cirurgias eletivas. Constituiu-se de um estudo metodológico de elaboração do protocolo e validação de conteúdo por especialistas. Fatores de risco que contém na escala ELPO: posição cirúrgica, tempo de cirurgia, tipo de anestesia, superfície de suporte, posição dos membros, comorbidades e idade do paciente.
Fonte: Dados gerados pelo autor, 2023.
4.2 ETAPA 2: MAPEAR OS FATORES DE RISCO INTRÍNSECOS E EXTRÍNSECOS
Dentre os 04 artigos incluídos, foram identificados um total de 12 fatores de risco (n=12), divididos como intrínsecos e extrínsecos ao paciente, como mostra o quadro 4.
Quadro 04. Fatores de risco identificados no estudo através da revisão integrativa da literatura. Rio de Janeiro/ Brasil, 2023.
FATORES DE RISCO PARA POSICIONAMENTO OPERATÓRIO ROBÓTICO INTRÍNSECOS EXTRÍNSECOS Idade Sexo Índice de Massa Corpórea Comorbidades Classificação ASA Doença Pulmonar Obstrutiva Crônica Tempo cirúrgico Tipo de anestesia Superfície de suporte Posição dos membros Posição cirúrgica Método operacional
Fonte: Dados gerados pelo autor, 2023.
A cirurgia robótica se tornou um marco inovador para o avanço das cirurgias minimamente invasivas. Técnicas cirúrgicas, cursos de aprimoramento multiprofissional e de especialização para atuação nesta modalidade vem cada vez tomando conta do mercado acerca desta temática. O gerenciamento da sala operatória para cirurgia robótica assim como o posicionamento cirúrgico são, dentre outras, atribuições de relevância para atuação do enfermeiro(a) de sala operatória.
Para enfermagem perioperatória, ofertar cuidados baseados em evidências científicas para esta modalidade cirúrgica traz respaldo tanto para o enfermeiro(a) mas também para com o paciente que será submetido a uma intervenção cirúrgica e sua segurança durante todo ato cirúrgico.
A partir disso, ao desenvolver esta revisão integrativa da literatura e observar que dentre um N inicial= 4.238 artigos identificados apenas obteve-se uma amostra final de N=4 estudos, visto a complexidade da temática, provocou uma inquietação para ampliação por novas estratégias de busca e reagrupamento dos descritores de forma que pudesse ampliar o resultado. Todavia, o escore final não obteve aumento.
Dentre o cenário apresentado, nota-se a escassez de estudos publicados acerca da temática abordada observando a contra posição entre o crescimento de profissionais enfermeiros especialistas em cirurgia robótica, onde vivenciam na prática as demandas e complexidades desta modalidade cirúrgica e as especificidades dos pacientes que são submetidos a posicionamentos complexos como o trendelenburg severo e a produção de literatura que baseia a temática com o intuito de auxiliar a prática baseada em evidências.
5. CONCLUSÃO
Lesões por pressão decorrentes do posicionamento são consideradas eventos adversos, provocados devido ao procedimento cirúrgico e dentre atuação do enfermeiro em cirurgia robótica evitar esse evento adverso identificando fatores de risco precursores, melhora a qualidade da assistência e por consequência traz segurança cirúrgica que o paciente precisa.
Este estudo nos permitiu identificar, com base na revisão integrativa da literatura bem estruturada, os principais fatores de risco intrínsecos e extrínsecos para desenvolvimento de lesão por pressão de pacientes submetidos a cirurgias urológicas por via robótica em que precisam ser posicionados em trendelenburg severo para que possa nortear a prática do enfermeiro a frente do cuidado nesse posicionamento em sala operatória.
Todavia, conclui-se que a uma escassez de estudos relacionados a essa temática, que envolve uma modalidade cirúrgica em crescimento, e a atuação do enfermeiro perioperatório além da prática, mas também na elaboração de produção científica acerca do tema abordado.
6. REFERÊNCIAS
CARNEIRO, G.A, LEITE, R.C.B.O. Lesões de pele no intra-operatório de cirurgia cardíaca: incidência e caracterização. Rev Esc Enferm USP. v.45, n.3, p:611-6, 2011.
FLAUZINO, V.H.P, VITORINO, P.G.S, HERNANDES, L.O. et. Al. Os cuidados de enfermagem no posicionamento anestésico-cirúrgico. Reseach, Society and Development, v.10, n.6, E334410615358, 2021.
GALVÃO, T. F, PANSANI, T. S. A, HARRAD, D. Principais itens para relatar Revisões sistemáticas e Meta-análises: A recomendação PRISMA [traduzido]. Epidemiologia e Serviços de Saúde, v. 24, n. 2, p. 335-342, 2015.
GOMES, S. K. A. Protocolo de avaliação de risco para desenvolvimento de lesões decorrentes do posicionamento cirúrgico em idosos. 2019. 60f. (Dissertação) Programa de Mestrado Profissional em Gerontologia – Centro de Ciências da Saúde, Universidade Federal de Paraíba, João Pessoa, Paraíba, 2019.
GUIDO, L. A et al. Cuidado de enfermagem perioperatório: revisão integrativa de literatura. Revista de pesquisa cuidado fundamental online. v.6, n.4, p:1601-09, 2014.
INSTITUTO NACIONAL DE CÂNCER JOSÉ ALENCAR GOMES DA SILVA (incA). O futuro chega à sala de operações do iNCa. Rev Rede Cancer.v.7, p:10-2, 2012.
JOHANSSON, V. R; VOGELSANG, A.C.V. Patient‐reported extremity symptoms after robot‐assisted laparoscopic cystectomy J. Clin. Nurs. 28, p:1708/18, 2019.
KINGO, P.S. et. al. Postoperative C-reactive protein concentration and clinical outcome: comparison of open cystectomy to robot-assisted laparoscopic cystectomy with extracorporeal or intracorporeal urinary diversion in a prospective study. Scandinavian Journal of Urology, vol. 51, no. 5, p:381/87, 2017.
MADUREIRA, D.F. A cirurgia robótica: uma realidade entre nós. Rev. Col. Bras. Cir. V.42, n.5, p:43-51, 2018.
MENESES, R.O, MATOS, L.C, ELEUTERIO, T.A, et al. Perfil de saúde hospitalar dos pacientes submetidos à cirurgia robótica: estudo retrospectivo observacional. Research, Society and Development, v.10, n.3, E23310313092, 2021.
PEIXOTO, C.A, FERREIRA, M.B.G, FELIX, M.M.S, et al. Classificação de risco de desenvolvimento de lesões decorrentes do posicionamento cirúrgico. Rev. Latino-Am. Enferm. V.27, E3117, 2019.
PINTO, V., LUARDI, L.S, et al. Atuação do enfermeiro na cirurgia robótica: desafios e perspectivas. Rev. SOBECC. V.23, n.1, p:43-51, 2018.
SANT’ANNA, J.R, PRATES, P.R, KALIL, R.A. et al. Emprego de sistemas robóticos na cirurgia cardiovascular. Revista Brasileira de Cirurgia Cardiovascular. V.19, n.2, p:171-178, 2004.
SANTOS, C. M. C, PIMENTA, C. A. M, NOBRE, M. R. C. A estratégia PICO para a construção da pergunta de pesquisa e busca de evidências. Revista Latino-Americana de Enfermagem, v. 15, n. 3, s/p, 2007.
SORENSEN, E.E, KUSK, K.H, GRONKJAER, M. Operating room nurses’ positioning of anesthetized surgical patients. J Clin Nurs. v.25, n.5-6, p:690-8, 2015.
SPRICE, L. Back to Basics: Preventing Perioperative Pressure Injuries. AORN J. v.105, n.1, p:92-9, 2017.
SPRICE, L. Van Wicklin SA. Back to basics: positioning the patient. AORN J. v.100, n.3, p:298-305, 2014.
TREVILATO, D.D, COSTA, M.R, MAGALHÃES, A.M.M, et al. Concepções das enfermeiras em relação a segurança do paciente durante o posicionamento cirúrgico. Rev. Gaúcha, Enferm. v.43, E202100451, 2022.
TREVILATO, D.D, MELO, T.C, FAGUNDES, M.A.B.G, et. al. Posicionamento cirúrgico: prevalência de risco de lesões em pacientes cirúrgicos. Rev. SOBECC. v.23, n.3, p:124-129, 2018.
¹Universidade do Estado do Rio de Janeiro, Manuellaholovaty17@gmail.com